![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
简介机器人行走电路由驱动电路和直流电机的正反转电路两个单元构成。电路通过运用555构成的多谐振荡电路,同步计数器74LS196,七段译码器74LS248,双JK触发器等基本单元电路,通过上述基
机器人行走电路由驱动电路和直流电机的正反转电路两个单元构成。电路通过运用555构成的多谐振荡电路,同步计数器74LS196,七段译码器74LS248,双JK触发器等基本单元电路,通过上述基本电路的级联组合,构成机器人行走电路。电路有效地实现机器人的行走与后退,通过调节阻值的大小而控制行走的时间,时间在数码显示管显示。利用三极管的导通和截止控制机器人的行走方向,从而满足设计电路的要求。
电路原理系统框图
方案一 电路图
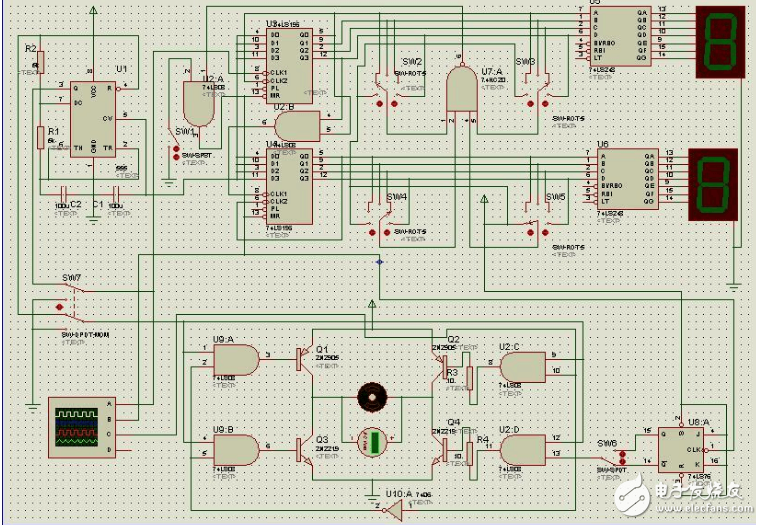
555构成多谐振荡电路产生方波信号,74LS196构成十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,触发器发生信号驱动直流电机两端压差发生正负跳变,直流电机正反转,实现机器人的前进和后退。电路中各个开关控制电机的转动及转动方向和时间。
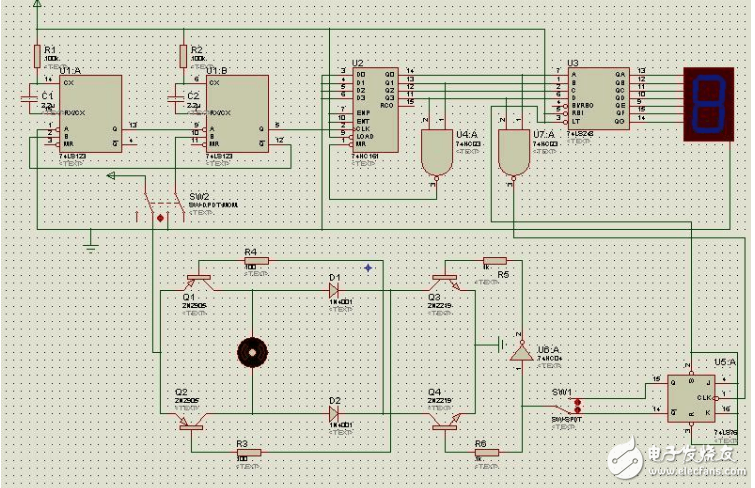
方案二 电路图
74LS123构成的定时器产生矩形波信号,用74HC161和与非门74HC03构成加十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,通过直流电机驱动电路改变电机两端电压方向,进而改变电机转向。电路中开关也可是电机制动,正反转。
机器人行走电路工作原理
555构成的多谐振荡电路产生方波信号接到74LS196时钟端触发74LS196加计数器计数,并通过74LS248驱动七段共阴极数码管显示计数。加计数器计数满十,通过74HC20与非门产生下降沿信号驱动双JK触发器使JK触发器构成的T‘触发器输出取非,从而驱动三极管构成的开关电路,通过各个三极管的导通与截止来实现直流电机两端的压差的正负跳变,驱动直流电动机的正反转,实现小车的前进与后退。其中,通过调节四个单刀五掷开关可以改变多谐电路输出方波周期,来调节小车的前进与后退的时间。
多谐振荡电路产生方波信号接入到74196时钟端,驱动74196进行加计数。图中74196接成了10进制加计数器,计数满十时通过74HC20与非门接入到清零端进行清零。由于计数到10时,便会立刻清零,不会在数码管上显示,所以此时信号很弱,不可以作为触发信号驱动JK触发器,JK触发器触发信号是计数到9时,通过74HC20输出下降沿信号触发。数码显示电路通过,74LS248驱动的七段共阴极数码管进行显示。
电子发烧友网技术编辑点评分析:
该机器人行走电路基本符合经过固定周期后自动前进和后退,自动计时,使用5V电压的干电池以及机器人行走的时间可调等基本要求。 (1)电机的以能耗制动的方式停止转动:可用一电阻与电机并联实现能耗制动;(2)电机速度的调节:可用滑动变阻器与电机串联,通过改变电阻来改变电机转速,不过只能定性的调,由于电机转速和多个物理量相关,因此这种方法要慎重;(3)可适当优化线路排布,方便扩展。
大家如有问题,欢迎在评论处讨论。
——电子发烧友网整理,转载请注明出处!
智能照明技术资料汇总——用你的设计智慧点亮智能照明之灯