![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
简介云台一般分两类,一类是做高速运转的球形摄像机,价格昂贵;另一类是以两个交流或直流电机组成的安装平台,通过控制系统在远端可以控制其水平和垂直方向的转动,实现全方位监
云台一般分两类,一类是做高速运转的球形摄像机,价格昂贵;另一类是以两个交流或直流电机组成的安装平台,通过控制系统在远端可以控制其水平和垂直方向的转动,实现全方位监控,这样的云台控制起来费时费力,不节能。为此,在做一定的市场调研后,结合已有技术设计出一款基于单片机智能控制的云台。该云台能根据设防区域内安装的多个传感器采集的信息去控制由步进电机组成的云台转动,只要入侵者进入设防区域云台就工作,人移动超过一定的距离,电机就转带动摄像头转动,始终保持人在监控摄像头的视角范围中心区域。整个工作过程全智能化,无需人操作,且步进电机易于控制转动度数,转动精确,可实现全方位准确监控摄像,使用方便节能。
系统组成
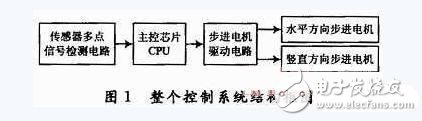
该智能控制云台系统主要由人体红外传感器、主控芯片、驱动电路、四相步进电机组成,框图如图1所示。在该系统中,多个传感器以云台为中心组成多点信号监测电路,采集云台四周(设计为八个方向,每个方向为45°的扇形区域)的多点数据,输入主控芯片进行数据计算处理,主控芯片再输出一定数量的脉冲给步进电机驱动电路,从而驱动步进电机带动摄像头转动一定的角度,实现全方位自动追踪监控。
主控芯片与驱动电路
AT89C52是Atmel公司生产的低电压,高性能CMOS微处理器,片内带8 KB的可反复擦写只读程序存储器,共有4个八位I/O接口,功能强大。L298N是SGS半导体公司生产的步进电机专用控制芯片,能产生四相控制信号,输出功率强,可用于控制两相、三相和四相步进电机,易于与单片机结合,实现单片机控制。
设计中以AT89C52为主控芯片,在软件的配合下用P0,P1口作为传感器信号输入口,扫描多点(设计为16点,也可视具体情况扩展)红外传感器的监测信息,信息经运算处理后,通过P2口输出脉冲给L298N组成的电机驱动电路来驱动电机转动一定的角度,从而带动云台上的摄像头转动一定角度(水平方向为 45°的倍数,最小45°,最大315°;竖直方向为15°的倍数,最小15°,最大75°,可通过软件修改),实现自动控制。电机选用四相步进电机,每个电机用四位I/O口控制,所以P2口低四位控制水平方向电机,高四位控制竖直方向电机。水平和竖直方向电机除转动角度不同,驱动原理完全一样。
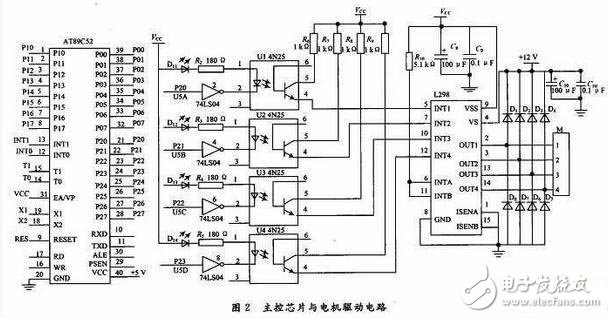
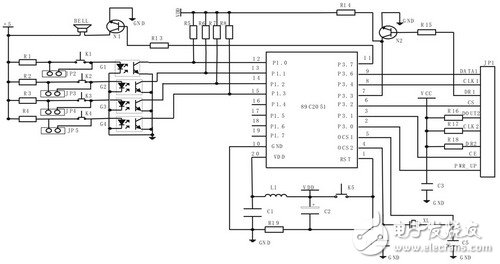
图2所示为主控芯片与水平方向驱动电路,在电路中为避免电机工作时对单片机的干扰,驱动中加入反相器和光耦进行隔离,使单片机稳定可靠工作。
人体红外传感器采集电路
PIR是一种能以非接触形式检测出人体或动物辐射的红外线能量变化并将其转换成电压信号输出的传感器。BIS0001是一种高性能的信号处理集成电路,由运算放大器、电压比较器、延迟时间和封锁时间定时器等构成,它与PIR和少量外接元器件可构成被动式的人体红外传感器采集电路。
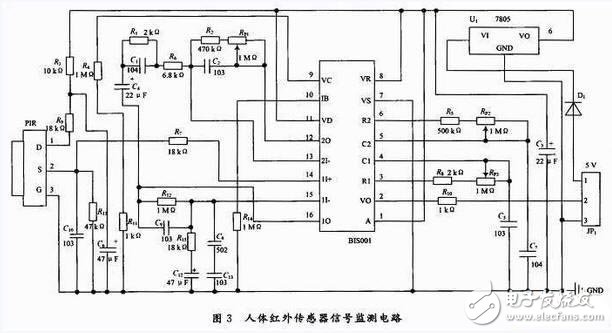
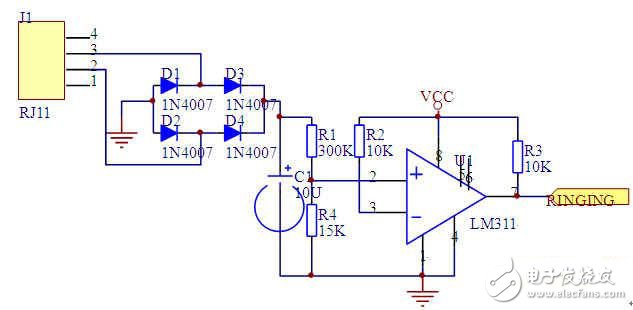
图3所示为人体红外传感器信号监测电路,电路中PIR采用LHl778来监测人体红外信号,采集的信号经BIS0001放大处理后以高低电平的形式输出给单片机运算处理,从而实现对设防区域的信号采集。设计的监测电路中可通过调节精密电位器Rp1调节PIR探头的灵敏度,实现对感应距离的控制,默认为5 m;调节Rp3控制信号的输出延时时间(Tx),Tx≈49 152&TImes;R8Rp3C5,默认为Tx≈1 s;调节Rp2控制信号的输出封锁时间(TI),监测电路在这个时间里输出低电平,TI≈24&TImes;R5Rp1C7,默认为1.2 s,所以结合Tx和Ti可控制监测电路的探测周期。实物中对PIR探头做了两种处理以实现对其监测面积的控制。当套用自制的金属框时可实现对半径为5 m,45°的扇形区域的探测,套用内径为7cm的空心金属套筒时,探测范围变成一条长约5 m的直线。经多次验证证明该传感器达到设计功能。
摄像头安装平台
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,电机的转速、停止位置取决于脉冲信号的频率和脉冲数,精度高,且步距角越小,输出转矩越大,带负载能力越强。设计中采用四相步进电机,它有三种工作方式:单四拍、双四拍、八拍,四拍时步距角为1.8°,八拍时步距角为0.9°。考虑到对步距精度高和输出转矩大的要求,使电机工作于八拍方式,按(A-AB-B-BC-C-CD-D-AD-A)依次通电,电机正转,反方向通电就反转,可通过控制每个脉冲之间的通电时间来控制电机转速。摄像头安装平台由一个竖直放置和一个水平放置的步进电机组成,即云台,可实现上下和左右转动,从而带动摄像头实现全方位监控。
测试结果
在软件调试成功后,进行了实物制作,经功能测试验证达到设计要求。测试中监测了以云台为中心八个方向,每个方向为45°的扇形区域,每个区域设两个点,共 16个点的信息,验证了设计功能。图5所示四幅图像为有人进入时,单片机自动控制云台转动时摄像头(电脑摄像头模拟)所拍摄的视屏部分画面截图。测试中以 A1A2,B1B2,C1C2,D1D2,E1E2,F1F2,G1G2,H1H2分别代表八个方向,下标1表示距离中心最近的一圈探测点(如 A1~H1),下标2表示离中心稍远的一圈探测点(如A2~H2),16个点构成以云台为圆心的极坐标系,在这16个位置中进行测试,设摄像头初始位置为 A1区域。
无人进入传感器监测区域时,云台上的摄像头停留在初始位置不动,当人从以云台为中心的8个方向中任意方向进入传感器探测区域时,电机能带动摄像头实现水平左右,竖直上下转动,始终使人处在摄像头视角范围的中心区域,实现全方位智能追踪监控摄像。经过多次测试和数据分析表明,该智能控制云台上电后能按设计要求进入正常的工作状态且准确度高,证实了方案的可行性和可靠性。
设计主要以单片机为控制核心,结合人体红外传感器组成的多点信号采集电路和L298N驱动电路去控制云台,对进入设防区域内移动的入侵者进行全方位自动追踪摄像。该云台转动角度精度高,带负载能力强,运行稳定,且无人时不工作,很节能。与现在市面上的高速球形和远程控制云台相比,该云台具有智能方便,运行省电节能,生产成本低,易于维护等优点。因此,利用该方法设计的云台在经过一定的加工处理后在智能控制、监控等领域有很强的实用价值和现实意义。