您现在的位置是:首页 > 电路图 > 电机控制电路 > 电机控制电路
小型履带式排爆机器人的设计与实现
![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
简介贾永兴,朱莹,杨宇 (解放军理工大学 通信工程学院,江苏 南京 210007) 摘要:设计并实现了一套功能高度集成的无线遥控机器人平台,由履带排爆机器人和手持控制终端组成。机器
贾永兴,朱莹,杨宇
(解放军理工大学 通信工程学院,江苏 南京 210007)
摘要:设计并实现了一套功能高度集成的无线遥控机器人平台,由履带排爆机器人和手持控制终端组成。机器人自身搭载的传感器可以对环境状态进行侦测,并发送给手持终端。手持终端则远程控制机器人的动作,实现危险爆炸物的排除和危险有害环境的监测,防止人员遭受伤害。该平台实现方案具有成本低、体积小、功耗低、可移植性和扩展性强等特点。
关键词:履带式机器人;手持终端;远程控制;危险环境
0引言
近年来,各种恐怖活动日益猖獗,为了维护社会稳定,研究开发反恐防爆技术和装备的需求越来越大。在军事上,危险环境时刻存在,如何保证人员的安全,有效地保证战斗力,也是亟需解决的问题。随着智能控制技术和传感器技术[1]的不断更新发展,用机器来代替人在危险环境下工作成为研究热点[23],得到国内外的广泛重视。本文设计和制作完成了一款履带式机器人和与之配套的手持控制终端,手持终端根据机器人回传的视频和传感器信息,通过远程控制,驱动机器人完成环境信息的侦测和危险爆炸物排除。
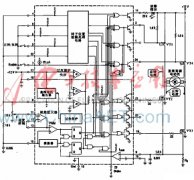
1系统框架
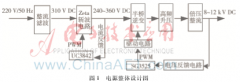
系统包括履带排爆机器人和手持控制终端两大部分,总体设计框图如图1所示。履带机器人由视频采集传输模块、机械模块、环境信息感知模块、无线通信模块以及控制模块构成。首先控制模块通过无线通信模块获取手持设备发送的控制命令,当命令是读取命令时,通过传感器读取各类环境参数信息,然后通过无线通信模块将各类环境参数信息发给控制终端显示。当控制命令是动作命令时,则根据接收的参数控制机器人运动或机械臂抓取爆炸物。考虑到带宽原因和控制方面的需求,图像传输模块与行动控制使用不同的无线信道。视频采集传输模块采集到图像后直接交给无线路由器,传送给手持设备,其过程不受主处理器控制。
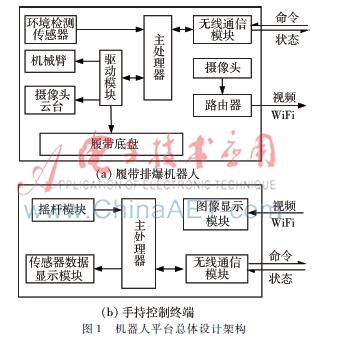
手控控制终端由控制模块、摇杆数据采集模块、显示模块及无线通信模块构成。手控终端首先检查是否有摇杆状态改变,若有就将相应控制信息进行编码,并交由无线通信模块发送给机器人执行。同时终端还会按照固定频率向机器人发送环境信息读取命令,并显示回传的视频信息和传感器信息。
2硬件设计
2.1手持控制终端
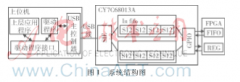
手持终端主控核心芯片为STM32F103zet6,它基于CortexM3架构,主频为72 MHz,有丰富的外设资源[4]。设计中主要使用了其A/D接口、GPIO接口、串口、SPI接口。其中A/D接口和GPIO接口与摇杆模块相连,采集摇杆状态信息;串口与无线模块相连,发送命令给无线模块,并读取无线模块接收的传感器数据;SPI接口与液晶模块相连,以显示传感器数据。
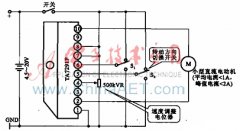
摇杆模块主要完成对机器人机械动作的控制,包括前进、后退等底盘运动和机器臂、云台等舵机运动。摇杆模块具有两路模拟输出。一路按钮数字输出。当摇杆上下左右摇动时,两路模拟信号可以输出不同的电压值,主控板根据通过采集电压值判读摇杆的运动情况,以控制机器人动作。一路数字输出主要用来判断摇杆是否按下(类似按键)。实现中采用了四个摇杆模块,以控制机器人底盘、机械臂和摄像头云台的动作。摇杆的模拟输出与主控板CPU的A/D接口相连,数字输出和CPU的GPIO口相连,以采集摇杆状态信息。
无线通信模块主要完成手持终端和机器人之间的数据传输,包括手持设备控制命令的发送和接收机器人返回的传感器信息。实现中采用HC11 无线串口模块,通信频率为433 MHz。硬件上与主控板CPU的串口相连,工作于半双工的模式,比特率为9 600 b/s,频道为001。
为了远程监测机器人所处的环境信息,实现中设计了两个显示模块。一个用来实时显示机器人采集回传的图像信息,以便观察环境和危险物的位置,控制机器人的动作。另一个用来显示接收到的传感器信息,以观察机器人所处环境信息。实现中图像显示采用了安装有火狐浏览器的手机,也可以采用平板电脑或PC,接收和显示WiFi传输过来的图像。传感器状态信息的显示采用了一个TFT液晶屏,它与CPU的SPI接口相连,显示传感器数据。
2.2履带机器人
机器人上的主控板同样采用基于STM32F103的控制板。通过串口读取来自无线手持设备的数据,并进行解析,以判断是机械操作命令还是读取传感器命令。如果是机械操作命令,则将给驱动模块发送相应的命令,驱动机器人动作。如果是读取传感器命令,则采集传感器数据,并交付给无线发送模块,发送给手持设备。
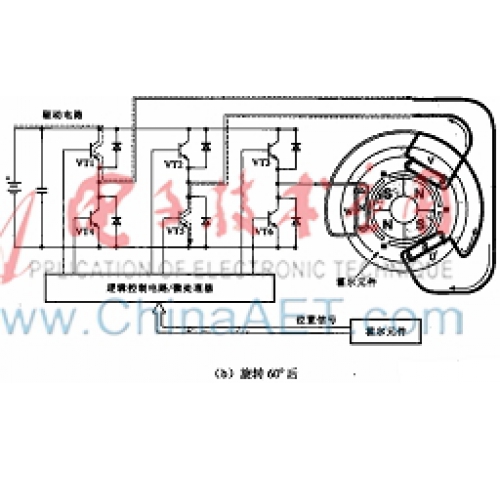
机械部分由机器人底盘、机械臂、摄像头云台等部分构成[5]。机器人底盘由两个直流电机驱动,机械臂设计采用了五自由度结构,由五个舵机和连接件构成,并在机械臂的前端设计了一个抓手,完成升降、抓取、释放等动作,摄像头云台采用三个舵机,用于调整摄像头的位置。机械驱动模块由STC11F32XE单片机与外围驱动电路构成,接收主控板串口发送的命令,以产生不同占空比的PWM波,或改变I/O口的输出方向,驱动底盘完成机器人前进、后退、左转、右转动作,控制舵机改变转角配合机械臂和云台动作。
视频采集和传输模块主要采集机器人附近的图像信息[6],并回传给手持设备。视频采集使用了罗技USB摄像头,将采集到的图像数据交给无线WiFi路由器,由路由器发送出去。无线路由器采用了TPLINK的150M无线路由器TLTLWR703N,工作于无线AP模式。通过更新组件,将简单的无线路由器刷成openwrt,并通过网络配置和安装相应的模块,使得USB摄像头数据可以直接通过WiFi发送。
无线通信模块主要接收手持设备传来的控制命令,交付给机器人主控板,同时接收主控板交付的传感器信息,发送给手持终端。采用与手持设备同类型模块,与主控板的串口相连,工作于半双工的模式。
为了感知机器人所处的环境状态,机器人上安装了多种传感器,包括数字式三轴陀螺仪、温湿度传感器、一氧化碳、有害烟尘浓度、甲烷浓度传感器。数字陀螺仪用于检测机器人行进时自身的平衡状态,采用了高精度陀螺加速度计MPU6050模块,与主控板CPU通过串口进行通信,波特率为115 200 b/s。该模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态。通过该模块发送至上位机的角度包,以了解机器人当前姿态。温湿度传感器数据输出与主控板CPU的GPIO口相连,采用单总线串行数据格式,一次通信传输5个字节数据,包括2字节温度数据,2字节湿度数据,1字节校验和。有害烟尘、甲烷、一氧化碳传感器主要基于气敏元件对不同类型、不同浓度的气体有不同的电阻值,并以电压的方式输出,检测物浓度越高输出值越高。实现中将这些传感器与主控板CPU的A/D接口,通过采样电压值,来获得相应的气体浓度。
3软件设计
软件代码完成系统各部份的控制和通信,在Keil集成环境下采用C语言编写,并通过编译、链接后,生成目标代码,通过下载器下载到STM32F103上运行。
为保证机器人和控制终端之间数据通信的有序性,采用主从机的工作方式,当机器人开机以后始终处于等待状态,等待手持控制终端发来指令。
3.1手持控制终端软件设计
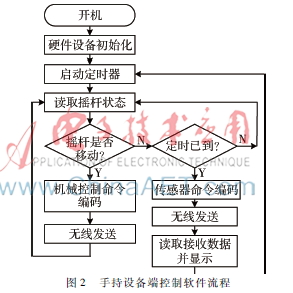
手控终端软件工作具体流程如图2所示。通过循环读取A/D通道的转换值,以确定控制摇杆是否有移动。如果有移动,就将各个通道数据编码为统一的控制数据格式,发送给机器人执行。如果没有,则确认定时器是否到时,如图2手持设备端控制软件流程
果时间到,则向机器人发送传感器数据读取指令。收到应答数据包后,对数据包进行校验,如确认接收正确,则对数据包分析,并将携带的传感器信息显示在液晶屏上。
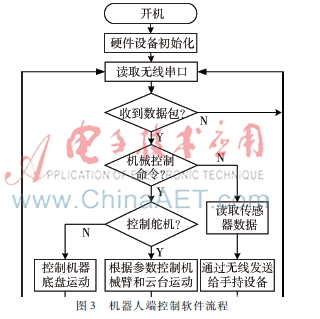
3.2履带机器人端软件设计
机器人软件设计流程如图3所示。通过读取串口判断是否收到手控终端的命令包。如果收到数据包,则解析命令是机械操作命令还是读取传感器命令。为了准确地定位到每个机械电机和舵机,与手控终端摇杆状态对应,实现中对每个电机和舵机进行了编号,并作为命令参数由手控终端发送。如果是读取传感器命令,则将传感器信息编码打包,通过无线通信模块发送给手控终端进行显示。
4系统功能实现
首先打开机器人电源,等待机器人各个部分完成初始化。此时打开手机(或PAD)会出现一个名为wifirobotlivking的WiFi热点,再打开火狐浏览器,输入预先设置的网址,可在浏览器中实时显示机器人采集回传的视频。接着打开机器人控制终端,液晶屏上会显示机器人所采集到的传感器信息,包括机器人当前横向及侧向倾角、机器人所处环境的温湿度值、有害烟尘浓度值等。根据回传的实时视频,操作者移动手持终端上的摇杆,可以通过无线方式远距离遥控机器人前进、后退、左转、右转等运动,同时控制机械臂抓取和释放物体,以及调整机器人安装的摄像头云台转角及俯仰角度确保最佳观测位置。
5结论
本文设计并实现了一套功能高度集成的无线遥控机器人平台,实现对机器人的远程操控。通过机器人自身搭载的传感器可以对目标环境参数进行监测,可进行危险爆炸物的排除和对危险有害环境的监测。该方案具有成本低、体积小、功耗低、可移植性和扩展性强等特点。下一步可以完善平台控制软件,增加地址识别功能,实现控制多台机器人的协同工作,同时加入GPS导航功能,使机器人能够记住自己的位置与行进路线,有一定的自主性,即使与手控端丢失联系,也能够自主返回。
参考文献
[1] 秦志强.先进机器人传感器技术[M]. 北京:电子工业出版社,2010.
[2] 莫海军,吴少炜.排爆机器人及相关技术[J].机器人技术与应用, 2005(4):31 36.
[3] 范路桥,姚锡凡,祁亨年.排爆机器人的研究现状及其关键技术[J].机床与液压, 2008,36(6):139 143.
[4] 彭刚,秦志强.基于ARM CortexM3的STM32系列嵌入式微控制器应用实践[M]. 北京:电子工业出版社,2011.
[5] 李健,许旻,杨杰.排爆机器人手臂的研制及运动学分析[J].机械与电子,2009,27(3):66 69.
[6] 范路桥,姚锡凡,蒋梁中,等.排爆机器人视频图像系统的研究与实现[J].科学技术与工程 ,2007,7(19):4904 4908.