![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
简介鱼类的游动具有高效性、机动性以及低噪性等优点。因此,仿生机器鱼的研究己成为机器人研究领域的热点。随着仿生机器鱼研究的不断深入,仿生机器鱼在水下搜救、水质检测以及海
鱼类的游动具有高效性、机动性以及低噪性等优点。因此,仿生机器鱼的研究己成为机器人研究领域的热点。随着仿生机器鱼研究的不断深入,仿生机器鱼在水下搜救、水质检测以及海洋资源勘探等领域发挥着重要的作用。近年来,机器鱼也成为国内国际高校机器人比赛项目之一。本文就是针对在国际水中机器人大赛的大平台上的三关节机器鱼而设计的一套双关节机器鱼控制系统。本机器鱼控制系统具有体积小、成本低、微功耗等优点,可以方便地运用到类似的机器鱼产品中。
机器鱼控制系统总体结构如图1所示。系统主要分为指令发送端和指令执行端,两部分均以CC1110无线单片机作为核心控制器,负责指令的发送、接收、数据处理,进而控制机器鱼的相关执行机构工作。指令发送端的指令来自上位机,USB串口转换电路将USB接口模拟成串口,实现上位机与CC1110的串口通信。电源模块完成电压的变换,为相关电路提供各种合适的工作电压。存储器模块存储机器鱼的相关信息。舵机驱动模块为执行机构舵机提供合适的控制信号。
USB串口转换电路
CH341T是一款USB总线转接芯片,通过简单的接线即可实现USB接口和串口之间的转换,此时无需改动上位机与下位机的程序,通过USB接口即可实现上位机与下位机的串行通信。USB串口转换电路原理图如图2所示。
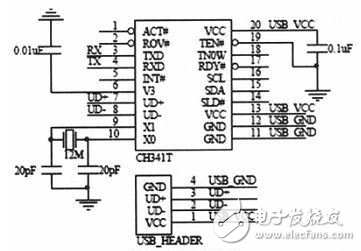
图2 USB串口转换电路
在本设计电路中,将CH341T芯片的SDA和SCL引脚悬空,此时芯片功能为USB转异步串口,模拟计算机串口;CH341T芯片的TXD和RXD两个引脚分别连接到CC1110无线单片机的RX(P0.2)和TX(P0.3)两个引脚;TEN#引脚为串口发送使能端,接地使CH341T能发送数据。 CH341T芯片的地要和CC1110无线单片机的地相连。CH341T不需外接电源,直接由上位机通过USB口提供+5V电源。
DC—DC电压变换电路
指令发送端由USB提供5V电压,指令执行端由电池提供5V直流电压。电池提供的5V直流电压可以直接为舵机驱动芯片以及舵机供电。而系统内部CC1110 无线单片机正常工作电压范围是2.0~3.6V,存储器芯片24AA01正常工作电压范围是1.7~5.5V,这里可以将二者的工作电压选择为3.3V。为此,专门设计了一个DC—DC电压变换电路,将5V直流电压变换为3.3V直流电压后再提供给CC1110无线单片机和24AA01芯片,以保证系统的正常工作。这里采用AMS公司生产的AMS1117芯片设计了电压变换电路,具体的DC-DC电压变换电路如图3所示。
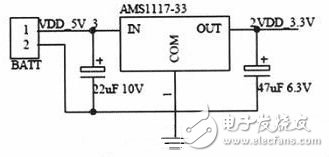
图3 DC-DC电压变换电路
在电压输入端接有22 μF电解电容及电压输出端接有47 μF电解电容,以保证输出电压的稳定。
CC1110无线收发电路
在机器鱼控制系统中,机器鱼指令的发送、接收以及指令解析执行是系统的关键部分。而现有的无线收发系统很多都是采用单片机和RF收发模块组成,这样整个控制电路的体积较大,将会使机器鱼的体积变大。为了将机器鱼体积做小以及将功耗降低,这里采用TI公司生产的一种低成本、低功耗的CC1110无线单片机作为指令收发执行的核心器件。CC1110无线收发电路如图4所示。
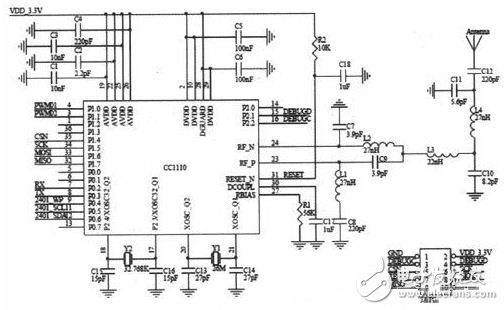
图4 CC1110无线收发电路
在无线收发电路中,电容C1—C6为电源去耦电容;电阻R2和电容C18构成上电复位电路;电容C7、C9以及电感L1、L2构成BALUN阻抗匹配电路,将输出阻抗转换为50 Ω标准天线阻抗;Y1、C13以及C14构成CC1110高速时钟源;Y2、C15以及C16构成CC1110低速时钟源:JATG接口用于在线调试与下载程序;PWM01(P1.0)和PWM02(P1.1)接舵机驱动电路的输入;RX(P0.2)和TX(P0.3)接USB串口转换电路,用于串口通信;2401_WP(P0.4)、2401_SCL(P0.5)以及2401_SDA(P0.6)接存储器模块,控制存储器的读写。