

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 .功能介绍 西门子变频器的 PID 控制属于闭环控制,是使控制系统的被控量迅速而准确地无限接近目标值的一种手段。即实时地将传感器反馈回来的信号与被控量的目标信号相比较,
1.功能介绍 西门子变频器的PID控制属于闭环控制,是使控制系统的被控量迅速而准确地无限接近目标值的一种手段。即实时地将传感器反馈回来的信号与被控量的目标信号相比较,以判断是否达到预期的目标,如未达到则根据两者偏差继续调整,直至达到预定的控制目标为止。 如恒压供水,为了保证出口水压一定,如图3-6所示,采用压力传感器装在水泵附近的主出水管,感受到的压力转化为电信号作为反馈信号。变频器内置调节器作为压力调节器,调节器将来自压力传感器的压力反馈信号与出口压力给定值比较运算,其结果作为频率指令输送给变频器,调节水泵的转速使出口压保持一定。即当用水量增加,水压降低时,调节器使变频器输出频率增加,电动机拖动水泵加速,水压增大;反之,当用水量减少,水压上升,调节器使变频器输出频率减少,电动机拖动水泵减速,水压减小。另外,PID闭环控制功能也用于其他被控量的控制,如温度、速度等。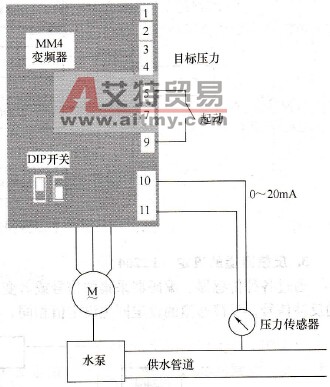 图3-6 MM4系列变频器的压力控制 西门子变频器供水参数设置前需要将P2251的控制方式设置为“0”(即PID作为设定值),其他具体参数设置如图3-7所示,其中微分系数P2274根据工艺情况进行审慎修改(如供水情况可以为0),滤波限幅P2265/P2267/P2268通常采用默认值。
图3-6 MM4系列变频器的压力控制 西门子变频器供水参数设置前需要将P2251的控制方式设置为“0”(即PID作为设定值),其他具体参数设置如图3-7所示,其中微分系数P2274根据工艺情况进行审慎修改(如供水情况可以为0),滤波限幅P2265/P2267/P2268通常采用默认值。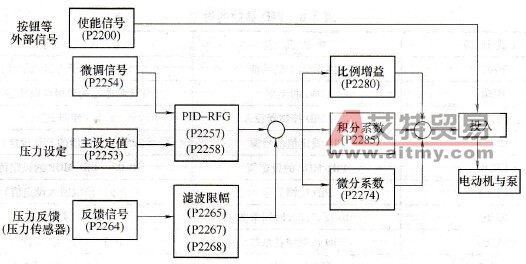 图3-7 供水PID控制具体参数设置 2.PID设定值信号源(P2253) 在MM4系列变频器中,主设定值的给定主要通过以下几种方式: 1)模拟输入; 2)固定PID设定值; 3)已激活的PID设定值。 图3-8所示为P2253的设定值。
图3-7 供水PID控制具体参数设置 2.PID设定值信号源(P2253) 在MM4系列变频器中,主设定值的给定主要通过以下几种方式: 1)模拟输入; 2)固定PID设定值; 3)已激活的PID设定值。 图3-8所示为P2253的设定值。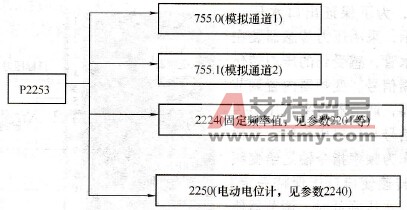 图3-8 P2253的设定值 3.反馈通道的设定( P2264) 通过各种传感器、编码器采集的信号或者变频器的模拟输出信号,均可以作为闭环系统的反馈信号,反馈通道的设定同主设定值相同。图3-9所示为P2264的设定值。
图3-8 P2253的设定值 3.反馈通道的设定( P2264) 通过各种传感器、编码器采集的信号或者变频器的模拟输出信号,均可以作为闭环系统的反馈信号,反馈通道的设定同主设定值相同。图3-9所示为P2264的设定值。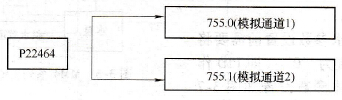 图3-9 P2264的设定值 4.PID固定频率的设定 (1)直接选择(P0701=15或P0702 =15) 在这种方式下,一个数字输入选择一个固定PID频率。 (2)直接选择+ON命令(P0701=16或P0702 =16) 每个数字输入在选择一个固定频率的同时,还带有运行命令。 (3)二进制编码的十进制数选择+ON命令(P0701=17到P0706 =17) 使用这种选择固定频率,最多可以选择15个不同的频率值。 (4)令P0701=99,P102D= 722.0,P1016=1,则选通P2201的频率设定值。 (5)令P0701= 99,P2220= 722.0,P2016 =1,则选通P2201的频率设定值。 5.PID控制器的设计 (1)比例增益系数P PID比例增益系数P(P2280)的作用是使控制器的输入输出成比例关系,一一对应,一有偏差立即会产生控制作用,当偏差为0时,控制作用也就为0。因此,比例控制是基于偏差进行调节的,是有差调节,为了尽量减小偏差,同时也为了加快响应速度,缩短调节时间,就需要增大P,但是P又受到系统稳定性的限制,不能任意增大,如果系统容易遭受突然跳变的反馈信号,一般情况下应将比例项P设定为较小的数值(0.5)。 (2)积分作用I PID的积分作用I(P2285)是为了消除静差而引入的,然而Ⅰ的引入使得响应的快速性下降,稳定性变差,尤其在大偏差阶段的积分往往使得系统响应出现过大的超调,调节时间变长,因此可以通过增大积分时间来减少积分作用,从而增加系统稳定性。 注意:当积分时间P2285为零的情况下,并不投入积分项。而如果在P2280为零的情况下,积分项的作用是误差信号的平方。 (3)微分作用D 微分作用D (P2274)的引入使之能够根据偏差变化的趋势做出反应,加快了对偏差变化的反应速度,能够有效地减小超调,缩小最大动态偏差,但同时又使系统容易受到高频干扰的影响。通常情况下,并不投入微分项,即P2274=0。 因此,只有合理地整定这3个参数,才能获得比较满意的控制性能。 6.PID控制器类型的选择(P2263) 1) P2263 =0是对反馈信号进行微分的控制器,即微分先行控制器,为了避免大幅度改变给定值所引起的振荡现象。 2) P2263 =1是对误差信号进行微分的控制器。 7.滤波 在闭环控制系统中,无论是传感器测量,主设定值的给定,都不可避免引入系统噪声,噪声的引入会引起系统不稳定和精度下降。因此,西门子MM4系列变频器在PID控制器的功能中又加入了滤波环节。为了平滑PID的设定值,设置P2261为一时间常数。为了平滑PID反馈信号,设置参数P2265为相应时间常数。 8.PID参数自整定 在MM440中,PID参数自整定是按照Ziegler Nichols标准,并根据系统的开环特性来确定控制器比例增益系数和积分时间。与此同时,MM440对PID参数进行自整定的时候,以阶跃响应的超调和响应时间为依据,通过选择不同的命令源来设定不同积分、微分系数和比例增益的大小。 令P2350 =1,使能PID自整定功能。通过设置不同的P2350的值,可以使系统具有不同的超调和阻尼。 9.PID trim(微调) PID闭环控制既可以适用于主设定回路控制,也可以作为微调控制,微调控制需设定以下参数: P2251=1;P2254选择微调回路的设定值。
图3-9 P2264的设定值 4.PID固定频率的设定 (1)直接选择(P0701=15或P0702 =15) 在这种方式下,一个数字输入选择一个固定PID频率。 (2)直接选择+ON命令(P0701=16或P0702 =16) 每个数字输入在选择一个固定频率的同时,还带有运行命令。 (3)二进制编码的十进制数选择+ON命令(P0701=17到P0706 =17) 使用这种选择固定频率,最多可以选择15个不同的频率值。 (4)令P0701=99,P102D= 722.0,P1016=1,则选通P2201的频率设定值。 (5)令P0701= 99,P2220= 722.0,P2016 =1,则选通P2201的频率设定值。 5.PID控制器的设计 (1)比例增益系数P PID比例增益系数P(P2280)的作用是使控制器的输入输出成比例关系,一一对应,一有偏差立即会产生控制作用,当偏差为0时,控制作用也就为0。因此,比例控制是基于偏差进行调节的,是有差调节,为了尽量减小偏差,同时也为了加快响应速度,缩短调节时间,就需要增大P,但是P又受到系统稳定性的限制,不能任意增大,如果系统容易遭受突然跳变的反馈信号,一般情况下应将比例项P设定为较小的数值(0.5)。 (2)积分作用I PID的积分作用I(P2285)是为了消除静差而引入的,然而Ⅰ的引入使得响应的快速性下降,稳定性变差,尤其在大偏差阶段的积分往往使得系统响应出现过大的超调,调节时间变长,因此可以通过增大积分时间来减少积分作用,从而增加系统稳定性。 注意:当积分时间P2285为零的情况下,并不投入积分项。而如果在P2280为零的情况下,积分项的作用是误差信号的平方。 (3)微分作用D 微分作用D (P2274)的引入使之能够根据偏差变化的趋势做出反应,加快了对偏差变化的反应速度,能够有效地减小超调,缩小最大动态偏差,但同时又使系统容易受到高频干扰的影响。通常情况下,并不投入微分项,即P2274=0。 因此,只有合理地整定这3个参数,才能获得比较满意的控制性能。 6.PID控制器类型的选择(P2263) 1) P2263 =0是对反馈信号进行微分的控制器,即微分先行控制器,为了避免大幅度改变给定值所引起的振荡现象。 2) P2263 =1是对误差信号进行微分的控制器。 7.滤波 在闭环控制系统中,无论是传感器测量,主设定值的给定,都不可避免引入系统噪声,噪声的引入会引起系统不稳定和精度下降。因此,西门子MM4系列变频器在PID控制器的功能中又加入了滤波环节。为了平滑PID的设定值,设置P2261为一时间常数。为了平滑PID反馈信号,设置参数P2265为相应时间常数。 8.PID参数自整定 在MM440中,PID参数自整定是按照Ziegler Nichols标准,并根据系统的开环特性来确定控制器比例增益系数和积分时间。与此同时,MM440对PID参数进行自整定的时候,以阶跃响应的超调和响应时间为依据,通过选择不同的命令源来设定不同积分、微分系数和比例增益的大小。 令P2350 =1,使能PID自整定功能。通过设置不同的P2350的值,可以使系统具有不同的超调和阻尼。 9.PID trim(微调) PID闭环控制既可以适用于主设定回路控制,也可以作为微调控制,微调控制需设定以下参数: P2251=1;P2254选择微调回路的设定值。







