

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介所谓四象限运行,是指拖动系统的工作点有可能出现在坐标系的四个象限中。电动机在不同象限中的工作状态是不一样的,如图 4-26 所示。 1 .四个象限的工作特点 (1) 第Ⅰ象限。是电
所谓四象限运行,是指拖动系统的工作点有可能出现在坐标系的四个象限中。电动机在不同象限中的工作状态是不一样的,如图4-26所示。 1.四个象限的工作特点 (1)第Ⅰ象限。是电动机的正向拖动状态,这时:电动机的转矩、转速和功率都是“+”值,大多数正向运行状态都在第1象限。 (2)第Ⅱ象限。电动机的转速是正方向的,但电磁转矩却是“-”的,说明是制动转矩。所以,电动机处于正向制动状态。因为制动状态是要把电动机在较高转速时的动能消耗掉,所以,功率为“-”值。 (3)第Ⅲ象限。是电动机的反向拖动状态,这时:电动机的转矩、转速都是“-”值,但功率是正的,说明是电动机在做功。拖动系统在反转运行时,其工作点在第Ⅲ象限。 (4)第Ⅳ象限。是反向制动状态。这时:电动机正在反转,转速足“-”的,但电磁转矩却是“+”的,故功率为“-”值。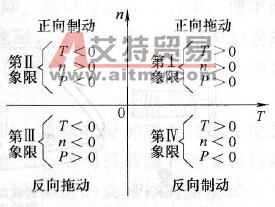 图4-26 电动机在四个象限中 2.起升过程中电动机的工作状态 (1)重物上升。重物的上升,完全是电动机正向转矩作用的结果。这时,电动机的旋转方向与转矩方向相同,处于电动机状态,其机械特性在第1象限,如图4-27b中之曲线②和所示(曲线①是负载的机械特性),工作点为Q1点,同步转速为n01;
图4-26 电动机在四个象限中 2.起升过程中电动机的工作状态 (1)重物上升。重物的上升,完全是电动机正向转矩作用的结果。这时,电动机的旋转方向与转矩方向相同,处于电动机状态,其机械特性在第1象限,如图4-27b中之曲线②和所示(曲线①是负载的机械特性),工作点为Q1点,同步转速为n01;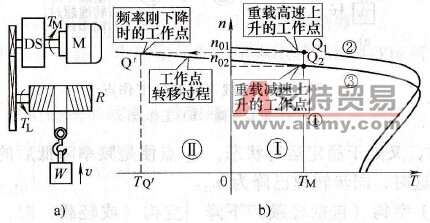 图4-27 重物上升时的工作点 a)重物上升b)工作点 当通过降低频率而减速时,在频率刚下降的瞬间,机械特性已经切换至曲线③了,工作点由Q1点跳变至Q′点,进入第Ⅱ象限,电动机处于再生制动状态(发电机状态),其转矩变为反方向的制动转矩,使转速迅速下降,并重又进入第一象限,至Q2点时,又处于稳定运行状态,Q2点便是频率降低后的新的工作点,这时,同步转速已降为n02。
图4-27 重物上升时的工作点 a)重物上升b)工作点 当通过降低频率而减速时,在频率刚下降的瞬间,机械特性已经切换至曲线③了,工作点由Q1点跳变至Q′点,进入第Ⅱ象限,电动机处于再生制动状态(发电机状态),其转矩变为反方向的制动转矩,使转速迅速下降,并重又进入第一象限,至Q2点时,又处于稳定运行状态,Q2点便是频率降低后的新的工作点,这时,同步转速已降为n02。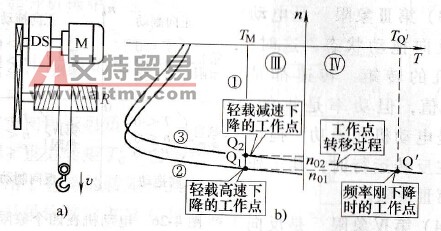 图4-28 空钩下降时的工作点 a)空钩下降b)工作点
图4-28 空钩下降时的工作点 a)空钩下降b)工作点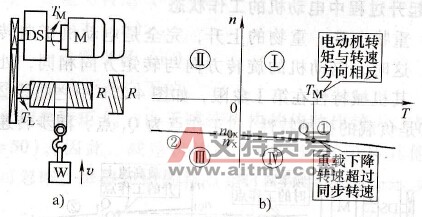 图4-29 重载下降时的工作点 a)重载下降b)工作点 (2)空钩(包括轻载)下降。空钩(或轻载)时,由于受减速机构摩擦转矩的阻碍,重物自身将不能下降,必须由电动机反向运行来实现。电动机的转矩和转速都是负的,故机械特性曲线在第Ⅲ象限,如图4-28中之曲线②,工作点为Q1点,同步转速为n01; 当通过降低频率而减速时,在频率刚下降的瞬间,机械特性已经切换至曲线③,工作点由Q1点跳变至Q′点,进入第Ⅳ象限,电动机处于反向的再生制动状态(发电机状态),其转矩变为正方向,以阻止重物快速下降,所以也是制动转矩,使下降的速度减慢,并重义进入第三象限,至Q2点时,又处于稳定运行状态,Q2点便是频率降低后的新的工作点,这时,同步转速为702。 (3)重载下降。重载下降时,雨物自身的重力将超过摩擦转矩,具有依靠自重而下降的能力,电动机的旋转速度将超过同步转速而进入再生制动状态。电动机的旋转方向是反转(下降)的,但其转矩的方向却与旋转方向相反,是正方向的,其机械特性如图4-29b所示,工作点为Q点,转速为nX。这时,电动机的作用是防止重物由于重力加速度的原因而不断加速,达到使重物匀速下降的目的。在这种情况下,摩擦转矩也将阻碍重物下降,故重物在下降时构成的负载转矩比上升时小。
图4-29 重载下降时的工作点 a)重载下降b)工作点 (2)空钩(包括轻载)下降。空钩(或轻载)时,由于受减速机构摩擦转矩的阻碍,重物自身将不能下降,必须由电动机反向运行来实现。电动机的转矩和转速都是负的,故机械特性曲线在第Ⅲ象限,如图4-28中之曲线②,工作点为Q1点,同步转速为n01; 当通过降低频率而减速时,在频率刚下降的瞬间,机械特性已经切换至曲线③,工作点由Q1点跳变至Q′点,进入第Ⅳ象限,电动机处于反向的再生制动状态(发电机状态),其转矩变为正方向,以阻止重物快速下降,所以也是制动转矩,使下降的速度减慢,并重义进入第三象限,至Q2点时,又处于稳定运行状态,Q2点便是频率降低后的新的工作点,这时,同步转速为702。 (3)重载下降。重载下降时,雨物自身的重力将超过摩擦转矩,具有依靠自重而下降的能力,电动机的旋转速度将超过同步转速而进入再生制动状态。电动机的旋转方向是反转(下降)的,但其转矩的方向却与旋转方向相反,是正方向的,其机械特性如图4-29b所示,工作点为Q点,转速为nX。这时,电动机的作用是防止重物由于重力加速度的原因而不断加速,达到使重物匀速下降的目的。在这种情况下,摩擦转矩也将阻碍重物下降,故重物在下降时构成的负载转矩比上升时小。







