

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介对于他励直流电动机,电动机的磁场由励磁绕组产生,在励磁电流不变时如果忽略电枢反应所造成的影响,电动机的转矩与电枢电流成正比,控制电枢电流即可控制电动机的转矩。而对
对于他励直流电动机,电动机的磁场由励磁绕组产生,在励磁电流不变时如果忽略电枢反应所造成的影响,电动机的转矩与电枢电流成正比,控制电枢电流即可控制电动机的转矩。而对于异步电动机,简单地控制电动机的定子电流大小并不能控制电动机的转矩。这是因为异步电动机的转矩不仅与电动机磁通和电流的大小有关,而且还和它们之间的相位差有关。电动机的定子电流大,并不意味着电动机的转矩大。例如,在异步电动机全压启动时,电动机中将流过5~7倍的额定电流,但所能产生的转矩并不大。矢量控制的基本出发点是将异步电动机构造上不能分离的转矩电流和励磁电流分离成相位差90°的转矩电流和励磁电流分别进行控制,从而改善了异步电动机的动态控制性能。为了实现矢量控制的目的,需要将电动机的三相电流按坐标变换的方法变换成两相电流,在两相坐标系上确定电动机的转矩电流和励磁电流大小并分别进行控制,再将两相电流变换成三相电流设定值,然后采用电流闭环控制实际电流。 异步电动机的定子绕组通常为三相绕组,转子为三相或多相绕组,没有励磁绕组,定子绕组磁动势和转子绕组磁动势共同作用产生异步电动机的气隙磁场。为了减小定子电流的励磁电流分量,异步电动机的气隙长度较短。在分析异步电动机动态过程时,为了便于在工程应用中的分析,有必要对异步电动机的模型加以“理想化”。“理想化”的异步电动机有如下的假定。 ①忽略电动机铁芯的饱和、磁滞及涡流的影响,铁芯及导线的趋表效应也不考虑。 ②忽略定子、转子谐波磁动势的影响,即认为气隙磁动势按正弦分布。 ③忽略定子、转于齿槽影响,即认为气隙是均匀的。 ④转子为三相绕组。 根据这些假设,“理想化”异步电动机的定子绕组的自感系数L1、转子绕组的自感系数L2、定子三相绕组之间的互感系数Muv、Mvw、Mwu以及转子多相绕组之间的互感系数均为常数。而定、转子绕组之间的互感系数Msr见式(3-7)。 Msr=Mcosγ (3-7)式中 γ一一定子三相绕组中心线与转子三相绕组中心线之间的电角度。 当γ=0时,即定、转子绕组的中心线重合时它们之间的互感为最大。当转子旋转时,定、转子绕组之间的互感系数Msr是时变系数。 可以用异步电动机的自感系数、互感系数等参数,选择电动机的定、转子电流(或磁通)做为状态变量,写出电动机的状态方程式。假定三相电动机没有中性线,那么定子三相电流是相关的(三相电流之和为0),因此描述三相交流电动机定子电流的独立变量只有2个。同理,在将转子绕组等效为三相绕组以后,描述转子电流的独立变量也为2个。这样一来,三相异步电动机的状态方程式为4阶微分方程组(假定电动机的速度为常数)。如果考虑电动机的运动方程式,那么三相异步电动机的状态方程式为5阶微分方程组。但是这样写出的数学模型是个有时变参数的非线性微分方程组,分析较为困难。 根据电动机过渡过程的理论,可以通过坐标变换使问题简化。它的基本思路是将三相异步电动机等效为空间上互差90°的两相电动机,由此推导出电动机的状态方程式。这种数学模型的阶次不变,仍为5(或4)阶。这种变换从物理意义上不难理解。因为电动机的机电过程是通过磁场而作用的,只要变换前后的磁场不发生变化,电动机的机电过程就不会发生变化。事实上,在讨论电动机理论时,三相交流电动机能以三相对称电流产生圆形旋转磁场,两相电动机通以两相对称电流也可以产生圆形旋转磁场,因此从磁场的作用看,三相绕组所产生的磁场可以用两相绕组所产生的磁场来等效,矢量控制中的3/2、2/3变换的计算亦是一种等效计算,变换后的异步电动机具有和直流电动机相类似的绕组结构。换个角度考虑,从产生圆形旋转磁场出发,不必去追究这个磁场是两相绕组产生的,还是三相绕组产生的。从数学角度考虑,任何一个状态空间均可经过线性变换,变换到另一个线性空间。状态方程组在进行线性变换时,其维数不发生变化,且为一一对应的。 根据矢量控制的理论和相应计算,电动机的转矩和定子电流的转矩分量成比例,只要控制定子电流分量即可控制电动机的转矩,且转矩响应的速度和电流响应速度相等。矢量控制的基本思路如图3-12所示。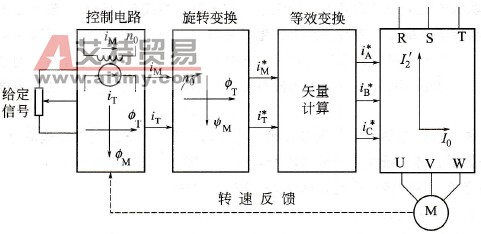 图3-12 矢量控制框图
图3-12 矢量控制框图







