

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1)PID 动作选择 在自动控制系统中,电动机的转速与被控量的变化趋势相反,称为负反馈,或正逻辑,反之为负逻辑,如空气压缩机的恒压控制中,压力越高要求电动机的转速越低,其逻
1)PID动作选择 在自动控制系统中,电动机的转速与被控量的变化趋势相反,称为负反馈,或正逻辑,反之为负逻辑,如空气压缩机的恒压控制中,压力越高要求电动机的转速越低,其逻辑关系为正逻辑。空调机制冷中温度越高,要求电动机转速越高,其逻辑关系为负逻辑。 PID动作选择(Pr.128)有3种功能: “0”-PID功能无效。 “1”-PID正逻辑(负反馈、负作用)。 “2”-PID反逻辑(正反馈、正作用)。 反馈量的逻辑关系如图6.31所示。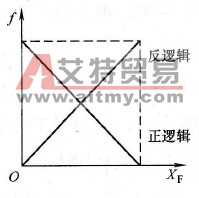 图6.31 反馈的逻辑关系 参数Pr.128的值根据具体情况进行预置。当预置变频器PID功能有效时,变频器完全按P、I、D调节规律运行,其工作特点如下。 (1)变频器的输出频率fx只根据反馈信号XF和目标信号XT比较的结果进行调整,故频率的大小与被控量之间并无对应关系。 (2)变频器的加、减速的过程将完全取决于P、I、D数据所决定的动态响应过程,而原来预置的“加速时间”和“减速时间”将不再起作用。 (3)变频器的输出频率fx始终处于调整状态,因此,其显示的频率常不稳定。 2)目标值的给定 (1)键盘给定法。由于目标信号是一个百分数,所以可由键盘直接给定。 (2)电位器给定法。目标信号从变频器的频率给定端输入。由于变频器已经预置为PID运行方式,所以在通过调节目标值时,显示屏上显示的是百分数,如图6.32所示。 (3)变量目标值给定法。在生产过程中,有时要求目标值能够根据具体情况进行调整,如图6.33所示。变量目标值为分挡类型。
图6.31 反馈的逻辑关系 参数Pr.128的值根据具体情况进行预置。当预置变频器PID功能有效时,变频器完全按P、I、D调节规律运行,其工作特点如下。 (1)变频器的输出频率fx只根据反馈信号XF和目标信号XT比较的结果进行调整,故频率的大小与被控量之间并无对应关系。 (2)变频器的加、减速的过程将完全取决于P、I、D数据所决定的动态响应过程,而原来预置的“加速时间”和“减速时间”将不再起作用。 (3)变频器的输出频率fx始终处于调整状态,因此,其显示的频率常不稳定。 2)目标值的给定 (1)键盘给定法。由于目标信号是一个百分数,所以可由键盘直接给定。 (2)电位器给定法。目标信号从变频器的频率给定端输入。由于变频器已经预置为PID运行方式,所以在通过调节目标值时,显示屏上显示的是百分数,如图6.32所示。 (3)变量目标值给定法。在生产过程中,有时要求目标值能够根据具体情况进行调整,如图6.33所示。变量目标值为分挡类型。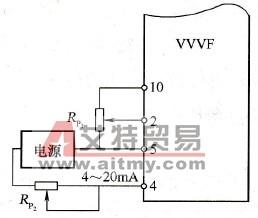 图6.32 PID参数手动模拟调试
图6.32 PID参数手动模拟调试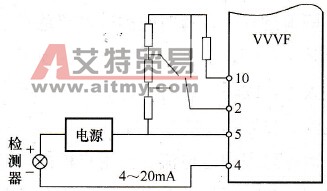 图6.33 变量目标值给定 3)PID参数设定 在系统运行之前,可以先用手动模拟的方式对PID功能进行初步调试(以负反馈为例)。先将目标值预置到实际需要的数值(可以通过图6.32中Rp2调节);将一个可调的电流信号(图6.32中通过Rp2的电流)接至变频器的反馈信号输入端,缓慢地调节反馈信号。正常情况是:当反馈信号超过目标信号时,变频器的输出频率将不断上升,直至最高频率;反之,当反馈信号低于目标信号时,变频器的输出频率将不断下降,直至频率0Hz。上升或下降的快慢,反映了积分时间的长短。 在许多要求不高的控制系统中,微分功能D可以不用。当系统运行时,被控量上升或下降后难以恢复,说明反应太慢,应加大比例增益Kp,直至比较满意为止;在增大Kp后,虽然反应快了,但容易在目标值附近波动,说明系统有振荡,.应加大积分时间,直至基本不振荡为止。在某些对反应速度要求较高的系统中,可考虑增加微分环节D。FR-E500变频器的PID参数设置及范围如下。 比例增益Kp:(Pr.129=0.1%~1000%,9999即无效)。 积分时间Ti:(Pr.130=0.1~3600s,9999即无效)。 微分时间τd:(Pr.134=0.01~10.00s, 9999即无效)。
图6.33 变量目标值给定 3)PID参数设定 在系统运行之前,可以先用手动模拟的方式对PID功能进行初步调试(以负反馈为例)。先将目标值预置到实际需要的数值(可以通过图6.32中Rp2调节);将一个可调的电流信号(图6.32中通过Rp2的电流)接至变频器的反馈信号输入端,缓慢地调节反馈信号。正常情况是:当反馈信号超过目标信号时,变频器的输出频率将不断上升,直至最高频率;反之,当反馈信号低于目标信号时,变频器的输出频率将不断下降,直至频率0Hz。上升或下降的快慢,反映了积分时间的长短。 在许多要求不高的控制系统中,微分功能D可以不用。当系统运行时,被控量上升或下降后难以恢复,说明反应太慢,应加大比例增益Kp,直至比较满意为止;在增大Kp后,虽然反应快了,但容易在目标值附近波动,说明系统有振荡,.应加大积分时间,直至基本不振荡为止。在某些对反应速度要求较高的系统中,可考虑增加微分环节D。FR-E500变频器的PID参数设置及范围如下。 比例增益Kp:(Pr.129=0.1%~1000%,9999即无效)。 积分时间Ti:(Pr.130=0.1~3600s,9999即无效)。 微分时间τd:(Pr.134=0.01~10.00s, 9999即无效)。







