

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 .电力拖动系统的状态 电动机产生的电磁转矩 TM 与负载的阻转矩(包括损耗转矩) TL 之差,称为电力拖动系统的动态转矩 TJ ,即 TJ=TM - TL (12-10) 式中 TJ- 动态转矩 (N m) ; T- 电动机转
1.电力拖动系统的状态 电动机产生的电磁转矩TM与负载的阻转矩(包括损耗转矩)TL之差,称为电力拖动系统的动态转矩TJ,即 TJ=TM - TL (12-10)式中TJ-动态转矩(N·m); T-电动机转矩(N·m); TL-负载转矩(N·m)。 当电动机转矩大于负载转矩时,电力拖动系统必加速: TM>TL→TJ>0→n↑→dn/dt为“+”(dn/dt是加速度); 反之,当电动机转矩小于负载转矩时‘,电力拖动系统必减速: TM<TL→TJ<0→n↓→dn/dt为“-”; 只有当电动机转矩与负载转矩相等时,电力拖动系统才在某一转速下稳定运行: TM=TL→TJ=0→n=const→dn/dt=0。 2.转矩给定信号与电力拖动系统状态 (1)转矩给定信号与电动机转矩。电动机的输出转矩TM取决于转矩给定信号TXM。当负载转矩TL小于电动机转矩TM时,电力拖动系统必加速; (2)上限转速。变频器在转矩控制模式下运行时,必须设置上限频率fH。当电力拖动系统的转速上升到接近于上限频率所对应的同步转速时,根据异步电动机的原理,由于转子切割磁力线的速度下降,所产生的转矩也必下降,直至TM=TL时,电力拖动系统将在上限转速nH下稳定运行。因此,当电力拖动系统的转速上升到上限转速时,电动机的转矩不再取决于转矩给定信号,但转矩给定信号保证了电力拖动系统将在上限转速下运行。 3.转矩给定信号不变、负载转矩改变如图12-10a所示,假设电动机的给定转矩TMX不变,则 (1)在t1前:负载转矩TL小于与XTM对应的TMX,TJ>0,电力拖动系统将加速,加速度随TJ的减小而减小,故升速过程呈半S形,一直加速到上限转速nH为止; (2)t1~t2段:电力拖动系统的转速已经上升到上限转速nH,尽管与负载转矩相比,转矩给定信号仍较大,但因为电动机的转速已经和同步转速接近了,故电动机的实际转矩处于和负载转矩相平衡的状态;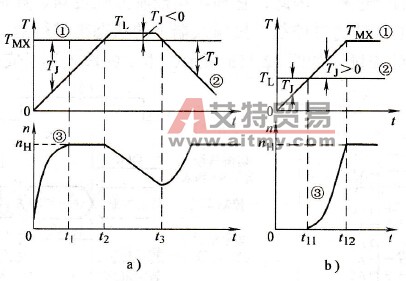 图12-10 转矩控制时的转速 a)转矩给定信号不变b)负载转矩不变 (3)t2~t3段:当负载转矩TL超过了与XTM对应的TMX,TJ<0,电力拖动系统将降速; (4) t3以后:当负载转矩TL又小于TMX时,电力拖动系统又将加速到上限转速nH,与t1~t2段的状态类似。但因TJ是由小逐渐增大的,故升速过程呈相反的半S状。 4.负载转矩不变、转矩给定信号改变如图12-10b所示,假设负载转矩TL不变,则 (1)在t11前:与XTM对应的TMX小于TL,TJ<0,电力拖动系统将不能起动; (2)t11~t12段:TMX超过了TL,TJ>0,电力拖动系统开始起动并加速,直到上限转速nH; (3)t12以后:尽管XTM始终保持一个较大的数值,但因电动机的转速已经接近于同步转速,电动机的实际输出转矩将减小为与负载转矩相平衡的状态。 在转矩控制模式下,由于变频器输出频率的大小不能调节。因此,很难使电力拖动系统在上限频率和下限频率之间的某一转速下等速运行。 5.转矩控制与转速控制的区别两种控制方式的区别见表12-1。 表12-1 转矩控制与转速控制的比较 控制方式 转速控制 转矩控制 转速大小 由频率给定信号决定 不能控制,只有上、下限值 转矩大小 与负载转矩相平衡,有上限值 由转矩给定信号决定 系统的加减速 由给定信号的增加或减小来决定 由动态转矩的正、负来决定
图12-10 转矩控制时的转速 a)转矩给定信号不变b)负载转矩不变 (3)t2~t3段:当负载转矩TL超过了与XTM对应的TMX,TJ<0,电力拖动系统将降速; (4) t3以后:当负载转矩TL又小于TMX时,电力拖动系统又将加速到上限转速nH,与t1~t2段的状态类似。但因TJ是由小逐渐增大的,故升速过程呈相反的半S状。 4.负载转矩不变、转矩给定信号改变如图12-10b所示,假设负载转矩TL不变,则 (1)在t11前:与XTM对应的TMX小于TL,TJ<0,电力拖动系统将不能起动; (2)t11~t12段:TMX超过了TL,TJ>0,电力拖动系统开始起动并加速,直到上限转速nH; (3)t12以后:尽管XTM始终保持一个较大的数值,但因电动机的转速已经接近于同步转速,电动机的实际输出转矩将减小为与负载转矩相平衡的状态。 在转矩控制模式下,由于变频器输出频率的大小不能调节。因此,很难使电力拖动系统在上限频率和下限频率之间的某一转速下等速运行。 5.转矩控制与转速控制的区别两种控制方式的区别见表12-1。 表12-1 转矩控制与转速控制的比较 控制方式 转速控制 转矩控制 转速大小 由频率给定信号决定 不能控制,只有上、下限值 转矩大小 与负载转矩相平衡,有上限值 由转矩给定信号决定 系统的加减速 由给定信号的增加或减小来决定 由动态转矩的正、负来决定







