![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介1 .拖动系统的转矩平衡。电动机在带动负载运行时,其转速大小必符合如下规律: TMTL → n ↑ TTL → n ↓ TM=TL → n=const 式中 TM - 电动机的转矩, N · m ; TL - 负载转矩(包括损耗转矩)
1.拖动系统的转矩平衡。电动机在带动负载运行时,其转速大小必符合如下规律:
TM>TL→n↑
T<TL→n↓
TM=TL→n=const
式中 TM -电动机的转矩,N·m;
TL -负载转矩(包括损耗转矩),N·m;
n-系统转速,r/min。
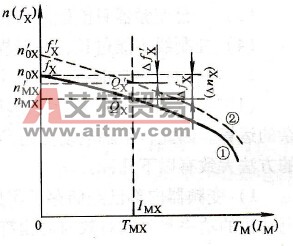
2.拖动系统的工作点。拖动系统的运行状态由电动机机械特性和负载机械特性的交点决定,如图3-3中之Q点。图中,曲线①是电动机的机械特性,曲线②是负载的机械特性,Q点称为拖动系统的工作点,设Q点的转速为nQ,则:
(1)转速下降为n1。当转速为n1时,电动机的转矩将增加为TM1,而负载的转矩将减小为TL1,显然:
TM1>TL1,系统必将加速,随着转速的上升,TM逐渐减小,而TL逐渐增大,直至到了Q点,才能稳定下来,如图a)所示。
(2)转速上升为n2。当转速为n2时,电动机的转矩将减小为TM2,而负载的转矩将增大为TL2,显然:
TM2<TL2,系统必将减速,随着转速的下降,TM逐渐增大,而TL逐渐减小,直至到了Q点,才能稳定下来。

图3-3 拖动系统的工作点
a)转速低于工作点的情形b)转速高于工作点的情形
所以,拖动系统只能在Q点稳定运行。
3.拖动系统的习惯性分析。如上述,在稳定状态下运行时,电动机的转矩总是和负载转矩相平衡的。所以,习惯上在分析电动机的机械特性时,横坐标常常直接作为负载转矩来看待,如图3-4所示,通常的说法是:当负载转矩从TL1增加到TL2时,系统的转速将从n1下降为n2。

图3-4 机械特性的习惯分析