![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
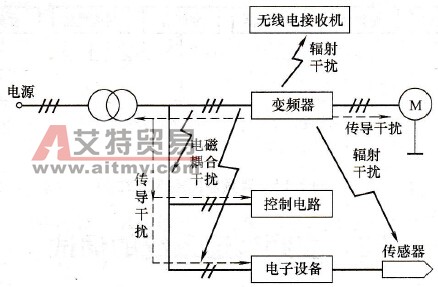
简介直接转矩控制也称为直接自控制,这种直接自控制的思想是以转矩为中心来进行磁链、转矩的综合控制。和矢量控制不同,直接转矩控制不采用解耦的方式,从而在算法上不存在旋转坐
直接转矩控制也称为直接自控制,这种直接自控制的思想是以转矩为中心来进行磁链、转矩的综合控制。和矢量控制不同,直接转矩控制不采用解耦的方式,从而在算法上不存在旋转坐标变换,简单地通过检测电动机定子电压和电流,借助瞬时空间矢量理论计算电动机的磁链和转矩,并根据与给定值比较所得差值,实现磁链和转矩的直接控制。
直接转矩控制对交流传动来说是一个优秀的电动机控制方法,它可以对所有交流电动机的核心变量进行直接控制。它开发出交流传动前所未有的能力,并给所有的应用提供了益处。在DTC中,定子磁通和转矩被作为主要的控制变量。高速数字信号处理器与先进的电动机软件模型相结合使电动机的状态每秒钟被更新40000次。由于电动机状态以及实际值和给定值的比较值被不断地更新,逆变器的每一次开关状态都是单独确定的。这意味着传动可以产生最佳的开关组合,并对负载扰动和瞬时掉电等动态变化做出快速响应。在DTC中不需要对电压、频率分别控制的PWM调制器。
目前应用直接转矩控制DTC技术的主要是ABB公司生产的ACS800等系列变频器,它们能够对速度进行精确地控制,根据不同的速度精度可以选择无脉冲编码器和有脉冲编码器两种,表2.1给出了在使用DTC直接转矩控制时的典型速度性能指标。
表2.1 直接转矩控制速度性能指标

其中动态速度误差依赖于速度控制器ASR的参数整定,图2.19所示为动态速度响应曲线。

图2.19 DTC直接转矩控制时的动态速度响应曲线
TN-电动机额定转矩;nN-电动机额定速度;
nact-实际速度;nref-设定速度
速度控制器的原理见图2.20 (a),该控制器包含了比例、微分、积分和微分加速度补偿,其经过PID作用后的输出作为转矩控制器的给定信号。
速度控制器的参数内容包括以下几个方面。
1)增益参数:定义速度控制器的比例增益,如增益过大可能引起速度波动。
2)积分时间参数:定义速度控制器的积分时间,即在偏差阶跃信号下,控制器输出信号的变化率。积分时间越短,连续偏差值的校正就越快,但是如果太短就会造成控制不稳定。

图2.20 DTC直接转矩控制
TN-电动机额定转矩;Tref-设定转矩;Tact-实际转矩
3)微分时间参数:定义速度控制器的微分时间,即在偏差值发生改变的情况下增加控制器的输出。微分时间越长,在偏差改变的过程中,控制器的输出速度就越快。微分作用使控制对扰动的敏感度增加。
4)加速补偿的微分时间:在加速过程中为了补偿惯性,将给定变化量的微分加到速度控制器的输出中。
5)滑差增益:定义了电动机滑差补偿控制的滑差增益,100%表示完全滑差补偿、0表示零滑差补偿。
速度控制器的参数值能在电动机辨识(与矢量控制的电动机辨识相同)整定期间进行自动调节,当然也可以手动整定控制器的相关参数,或是让变频器单独执行一次速度控制器自动整定运行。要注意的是,最终速度控制器的控制效果取决于各个参数的综合作用,因此电动机带负载运行进行自整定才是最合适的,同时可以在电动机额定转速的1/3作用下进行恒速度运行。