![]() 来源:艾特贸易2018-08-13
来源:艾特贸易2018-08-13
简介(1) 电动汽车永磁同步电动机控制系统如图 11-9 所示。该系统采用最大转矩和弱磁控制原理以实现电动机的效率最佳化和宽范围的调速。丰田的 RAV4-EV 电动汽车是比较有代表性的一个例子
(1)电动汽车永磁同步电动机控制系统如图11-9所示。该系统采用最大转矩和弱磁控制原理以实现电动机的效率最佳化和宽范围的调速。丰田的RAV4-EV电动汽车是比较有代表性的一个例子。在低速区段内,把由d-q轴电流决定的电流向量控制在其最大效率线上,而在高速区段内,由于电压饱和现象出现,则把电流控制在非常接近电压饱和的边界线上。考虑到某些参数的非线性,电流的命令值只能通过驱动电动机时的实测值以矩陈形式表达,然后用查表法来求出。该系统另一个重要的方面是要确保转子位置检测器的精度,因为转子位置检测误差可导致d-q轴电流向量的偏移,这意味着效率的损失,而在弱磁范围内,转矩会明显下降。车辆控制单元根据司机加速踏板踩的位置,计算出转矩命令值,然后通过计算和查表求出电流在d-q轴上的命令信号i*d、i*q,与从逆变器来的相电流id、iq比较后得电流的偏差值△id、△iq,通过PI调节器计算出d-q轴的命令电压Ud、Lq,利用2/3的变换,求出三个相的命令电压值Uu、Uv、Uw,再经PWM信号发生器把命令信号加到逆变器上。

图11-9 电动汽车永磁同步电动机控制系统图
(2)集转矩控制和PWM控制于一体的控制方案如图11-10所示。其中转矩控制方案可在整个运行范围内获得良好的转矩线性度,而PWM控制则可对电池电压实现最有效的使用。转矩控制部分采用两种控制方法:①电流向量控制法;②电压相位控制法。前者分别控制电流的幅值和相位,以获得良好的转矩线性度和快速的转矩响应。控制时,根据转矩命令把Iq维持在一适当的数值上,而使Id维持在0值,以产生最大输出转矩。电流调节器采用P调节器,以便充分利用电池的最大输出电压,由此造成的静态误差靠EMF和阻抗补偿器来减少。在弱磁控制区段内,当电压命令|U*c|大于逆变器的最大基波电压Umax时,要求Id≠0,但计算Id的最佳值很复杂,所以通常电压就设定为一个比必须的命令值大一些的值,然后靠电压相位控制系统控制|U*|使之总是与Umax相同,而其相位角δ*2则靠相位角计算器来算出。输出转矩只受U*的相角控制。上述两种转矩控制法是单独起作用的,当|U*c|<Umax时,用电流向量控制法;当转速上升,|U*c|≥Umax时,改用电压相位控制法,|U*|限制为Umax而用δ*2取代δ*1。两种控制法的过渡很平滑,不会在转矩上产生任何变化。

图11-10 电动汽车永磁同步电动机控制系统图
PWM控制法有向量PWM开关模式和单脉冲开关模式之分。前者无低次谐波分量,后者能输出最大的基波电压,理论上比前者大10%,但实测可达20%。原因是向量PWM开关模式时使用的是其载波频率,其最高基波电压比理论值略低;而单脉冲开关模式时,其铜耗及开关损耗下降,可使系统效率得以提高。但单脉冲开关模式谐波分量较大,因此只能在高速时应用。在输出电压为0~90.7%时用向量PWM开关模式,在电压为100%时用单脉冲开关模式,在电压为90.7%~100%时用5、3脉冲开关模式,作为过渡。
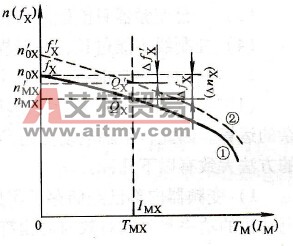
(3)采用相位超前法使永磁同步电动机实现弱磁恒功率运行。当电动机运行到基速时,其反电动势正好与电池的端电压相等,要使电动机速度进一步提高,可通过相位超前原理使磁场重新定向,使磁场对定子绕组的磁链减少,反电动势下降,电动机速度就提上去了。但要防止在甚高速时磁场过分减弱。有研究者提出了所谓的基于阻抗的相位超前法,强调在设计电动机时,就要考虑到能在高于基速的范围内,当转矩随速度的提高而减弱时,能获得一个大致恒定的功率输出区(最高速可达3~4倍基速)。亦即要设计成一个阻抗频率电压关系相互匹配的电动机。而且电动机的设计过程还要与逆变器及控制系统的设计过程一起配合进行,以便获得所需的与相位超前控制相兼容的电动机。仿真试验的结果,效率大多数在90%~94%范围内,能满足大功率电动汽车的应用要求。
(4)采用双绕组电动机及双逆变器的配置方案。所设计的系统,其电动机最大功率为70kW,2700~8100r/min。电动机低速绕组设计满足在基速上以某个中间速度时达到其最大可用的端电压,输出功率约40kW。高速绕组设计满足在稍低于最高转速时达到其最高允许的端电压,最大输出为30kW。两个绕组上下叠装在同样的槽孔内。每个绕组各由一台逆变器供电。当电动机运行在低、中速时,两个绕组及其配套的两组逆变器同时工作;当转速达到低速绕组的最高端电压时,低速绕组断开只留高速绕组工作。这种配置方式可使每个逆变器的电流负担相对减轻,体积可做小,铜耗减少。同时建议采用逆变器零电压切换方案以减少开关损耗,用里朝外的永磁同步电动机结构,使频率进一步提高。试验结果表明,整个传动系统在不同负载不同转速时的整体效率均在91%以上。
(5)采用DC/DC变换器与PWM逆变器串级连接的主回路方案。这是针对电动汽车轮子单独传动时,由于电动机的电感很小,会产生很大的脉动,从而产生附加I2R损耗的特殊情况而提出的。用DC/DC变换器产生一个依反电动势峰值而变的直流中间电压,供给逆变器,从而可显著地减少电流的脉动,I2R的损耗因而亦可减少。
(6)采用神经网络控制法。此方案是针对碟式转子轴向磁通结构的永磁同步电动机直接驱动车轮的布置方式提出的。由于电动机是固定在车箱底下的,有可能出现因道路颠簸而引发的电动机反电动势波动现象,采用本法可使脉动减少。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)