![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
简介马忠良1,周树道1,2,刘星3 (1.解放军理工大学 气象海洋学院,江苏 南京 210044; 2.南京信息工程大学气象灾害预警与评估协同创新中心,江苏 南京 210044; 3.解放军海洋环境专项办公室
马忠良1,周树道1,2,刘星3
(1.解放军理工大学 气象海洋学院,江苏 南京 210044; 2.南京信息工程大学气象灾害预警与评估协同创新中心,江苏 南京 210044; 3.解放军海洋环境专项办公室,北京 100081)
摘要:提出了一种基于光束扫描的透射仪测量光路准直方法,分析了该准直方法的原理。基于该方法设计了测量光路自动准直系统,该系统以LPC1768微控制器为核心,主要包括光强及位置信息采集模块、电机驱动模块,并进行了该系统的软件设计。系统利用透射仪测量光路进行对准,易于实现与透射仪测量系统的融合,且具有高精度、自动化的特点。
关键词:自动准直系统;光束扫描;透射仪
0引言
能见度是表征大气对视觉影响的物理量[1] ,也是气象观测中的一个要素[23],对能见度的测量通常采用能见度仪。透射式能见度仪(简称透射仪)不对大气作均匀假设,直接探测大气透过率和消光系数[4],测量精度比较高,更加适合于低能见度条件下使用,目前广泛应用于机场跑道等大气水平能见度测量场合。世界气象组织(WMO)开展的能见度仪器比对也是以透射仪为比对标准[5]。透射仪收发两端距离较远(>50 m),使得透射仪测量光路对准困难。同时,仪器在风力、热应力的作用下,收发两端位置会发生偏移,从而影响测量光路准直性。因此,在透射仪探测技术中,测量光路准直是影响透射仪测量精度的关键技术[6]。
本文介绍了一种基于扫描方式的透射仪测量光路自动准直系统。该系统具有高精度、自动化等特点,易于与透射仪测量系统结合。基于LPC1768微控制器设计了自动准直系统的硬件电路,并介绍了该系统的软件工作流程,通过多次对准提高了准直系统的对准精度。
1基于光束扫描方式的透射仪测量光路准直原理
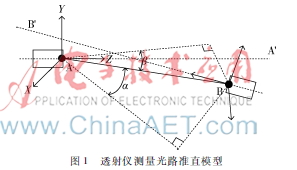
图1透射仪测量光路准直模型透射仪测量系统由发射器与接收器组成,透射仪测量光路的准直就是使得发射器A发出的探测光束中心线与接收器B的接收视场中心线重合。这就要求发射器和接收器均处在对准的位置。发射器或接收器的准直状态可通过两个垂直方向的准直方位角描述,如图1中α、β所示。当α、β均为0 deg时,表示发射器A对准。同理可得接收器B准直方位角。
基于光束扫描方式的透射仪测量光路准直方法准直原理是使发射器(或接收器)进行两个垂直方向的扫描运动,测量扫描运动过程中发射器(或接收器)的角度和接收光强。由于各方向准直方位角为光强随角度变化曲线的对称中心,因此,根据接收光强随角度变化的关系得到测量光路准直时发射器(或接收器)的准直方位角。完成测量及数据处理以后,驱动发射器(或接收器)运动使得各方位角为0 deg,从而实现测量光路的对准。
2总体方案设计
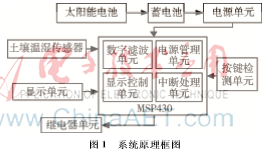
透射仪的自动准直系统是透射仪测量系统的辅助测量系统,结构及硬件、软件设计均是在透射仪测量系统的基础上进行的。准直系统工作时需要完成光源控制、接收光强测量、方位角测量、数据存储与处理以及驱动扫描和定位等功能。基于扫描方式的透射仪测量光路准直系统是利用透射仪本身测量光路进行对准,基于透射仪测量系统设计的自动准直系统。在透射仪测量系统中,已经实现了对测量光源的控制及接收光强的测量,因此,自动准直系统主要完成对位置信息的测量及控制发射器及接收器的位置。准直系统在透射仪测量系统微控制器的控制下进行工作,并在微控制器中完成数据存储与处理。准直系统组成框图如图2所示。
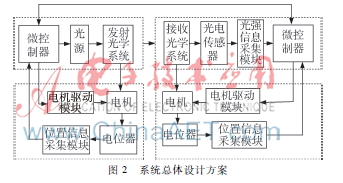
透射仪测量系统的主控制器为LPC1768,相比于其他控制器,基于ARM CotexM3内核的LPC1 768微控制器具有32位运算能力,且包含高达512 KB的Flash存储器、64 KB的数据存储器,具有丰富的外部接口,功能强大、使用灵活、成本合理。准直系统的位置信息采集模块和电机驱动模块通过I2C接口与微控制器相连,通过I2C总线传输控制命令和数据。
如图2所示,位置信息采集模块主要进行方位角的测量,在扫描及定位的过程中均需要进行方位角的测量。测量过程主要是将电位器采集的角度模拟信号转化成数字信号,并发送至主控制器。电机驱动模块主要驱动发射器或接收器进行两个垂直方向的扫描运动并最终将发射器或接收器定位到准直位置。电机驱动模块主要是根据主控器输出的控制命令产生电机控制电压信号,驱动电机进行相应的运转。
3硬件设计
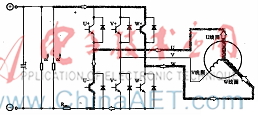
3.1位置信息采集模块
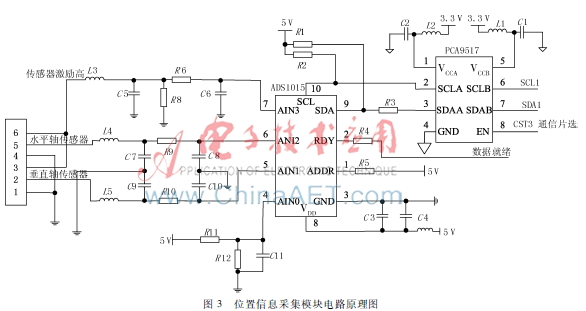
位置信息采集模块硬件电路如图3所示。模块采集的位置信息为电机旋转的角度,传感器采用角度传感器。两个垂直方向分别为水平方向和垂直方向。模块中采用ADS1015芯片进行位置信号的模数转换。该芯片为12位多路转换芯片,可实现两个垂直方向位置模拟信号高速、高精度转换。主控制器通过I2C接口经过PCA9517 I2C中继器来控制转换芯片。模块通过中继器可与其他I2C设备相连接。由于在位置信息模拟信号中存在一定的噪声成分,因此在ADS1015芯片模拟信号输入端设计了前置滤波电路。
当系统需采集相应位置信息时,主控制器选通PCA9517,通过I2C总线发送ADS1015芯片地址访问芯片,并发送相应通道的转换命令,启动一次位置信号的模数转换;当模数转换完成时,芯片置位RDY端口,提示主控芯片可读取转换结果,芯片将转换结果经过I2C总线发送至主控制器,完成一次位置信息的采集。
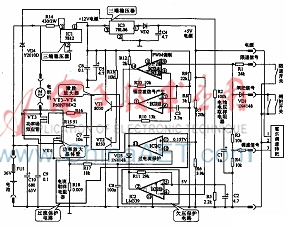
3.2电机驱动模块
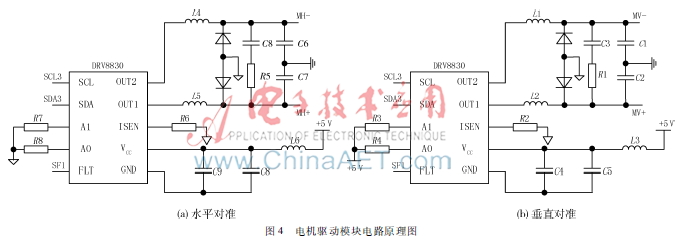
电机驱动模块硬件电路如图4所示。由于自动准直系统的发射器与接收器需要进行两个垂直方向的扫描及定位,因此每一端需要水平及垂直两个直流电机。模块中采用DRV8830作为直流电机的驱动芯片。DRV8830芯片是一个低压H桥电压控制直流电机驱动器。工作电源电压2.75 V~6.8 V。通过PWM电压调节技术控制芯片的电压输出,使得芯片能够在外部电源电压不稳的情况下保证电机运行速度的稳定。主控制器通过I2C总线控制驱动芯片的输出电压,进而控制直流电机的转动模式及转速。由于驱动芯片的输出为模拟信号,为了保证电机输入电压的稳定,在直流电机输入端设计了滤波电路。
当自动准直系统需要进行相应方向的扫描或定位时,主控制器选通相应的I2C中继器,通过I2C总线发送DRV8830芯片地址访问芯片,并发送相应的控制命令,驱动电机执行相应的动作。当没有新的控制命令时,驱动芯片驱动电机保持当前状态运转。
4软件设计
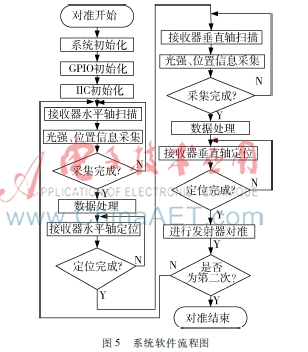
透射仪自动准直系统软件主程序流程如图5所示。
流程图描述了接收器对准过程,发射器对准过程与接收器对准过程类似。将透射仪安装完毕以后,先进行人工初始对准。人工初始对准的目的是让接收器能够接收到发射器发出的探测光。人工初始对准完毕后,由主控制器运行自动对准程序,进行自动对准。为了提高自动准直系统的对准精度,系统对发射器和接收器分别进行两次对准,每一次对准操作按照先接收器后发射器的顺序进行。自动准直程序首先进行初始化,完成相关初始化之后,按照先水平轴后垂直轴的顺序分别执行扫描、光强及位置信息采集、数据处理和定位操作。扫描和定位主要由电机驱动模块执行,定位过程中仍需要进行位置信息采集以判断电机转轴是否到达指定位置。光强信息采集是通过程序中的测量接收光强命令由透射仪中的接收光强测量模块完成。数据处理是由主控制器根据测量的光强及位置数据计算得到相应的方位角,该方位角即为定位过程中转轴需要到达的位置。
5结论
本文根据透射仪光学系统的特征,在其测量光路的基础上设计了基于扫描方式的自动准直系统,并配合相关传感器完成了系统的硬件电路设计,并对软件流程作了规划,可以实现透射仪测量光路的自动对准。该系统不需要另外设计对准光源,且利用透射仪主控制器进行控制,便于在透射仪测量系统中应用。
参考文献
[1] 饶瑞中. 大气中的视觉和大气能见度[J].光学学报,2010,30(9):2486 2492.
[2] 岳斌,董晶晶,孙东松,等. 便携式激光雷达能见度仪的研制[J].红外与激光工程,2008,37(S3):129 132.
[3] 牛利平,杨中秋. DT型大气能见度仪的光学系统[J].光电工程,1990,17(6):1 6.
[4] 程绍荣,魏全忠,吕军. 一种实用型大气透射式能见度仪的研制[J].光电工程,2011,38(2):144 150.
[5] 邢向楠,崔岩梅,李涛, 等. 基于透射法的能见度测量装置设计与实验研究[J].计测技术,2011,31(3):10 13.
[6] 马忠良,周树道. 透射式能见度仪发展现状与关键技术[J].气象水文装备,2015(2):9 12.