![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
简介潘玲云,王庆林,张磊 (南京邮电大学 自动化学院,江苏 南京 210003) 摘要:目前,国内大多数卫星通信业务是以固定站卫星通信为主,无法实现在运动中通信。因而,基于卫星通信
潘玲云,王庆林,张磊
(南京邮电大学 自动化学院,江苏 南京 210003)
摘要:目前,国内大多数卫星通信业务是以固定站卫星通信为主,无法实现在运动中通信。因而,基于卫星通信的运动中通信设备-“车载动中通”系统应运而生。文章研究了两轴捷联式车载移动卫星通信地球站,可实现在运动中实时卫星通信。车载“动中通”伺服控制系统主要研究系统硬件结构、算法设计和系统建模与仿真。由于车辆行驶速度、路况的高度不确定性,车载“动中通”伺服系统采用模糊PID控制,对星策略采用圆锥扫描算法。系统仿真采用MATLAB中Simulink模块完成,仿真结果表明,车载“动中通”伺服系统输入与输出的稳态误差很小,动态性能良好。
关键词:车载“动中通”;伺服控制系统;建模与仿真;圆锥扫描算法;模糊PID控制
0引言
车载“动中通”卫星地球站主要应用于自然灾害应急通信、治安管理通信以及商业信息化等。我国地域广阔、环境多样,通信自然灾害时常发生,当面对自然给基础设施带来的破坏,车载能够第一时间为受灾区域与外界建立联系,交互受灾情况信息,及时准确地采取应对措施。车载“动中通”可广泛应用于交通运输、抢险救灾、新闻采访、科考探险、公安和军事等应急和特殊通信领域,具有广阔的市场需求[1] 。正因为这些优势,车载成为各国发展的重点项目。
伺服控制系统是车载“动中通”系统的核心组成部分,优良的伺服控制系统是“动中通”能够正常工作的重要前提[2]。伺服系统通过各种位置状态传感器、微处理器和驱动设施,随动地调整系统天线的指向,保持天线稳定地指向同一位置而不受载体姿态影响。跟踪卫星结合FuzzyPID算法和圆锥扫描算法,能够快速准确地捕获目标卫星,并使得天线持续、稳定地跟踪目标卫星。
1伺服控制系统结构设计
1.1伺服系统工作原理
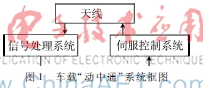
车载“动中通”主要由空间天线、信号处理系统和伺服控制系统组成。系统框图如图1所示。图1车载“动中通”系统框图其中天线用于指向同步卫星接收和发送视频、图像、语音等信号[3]。信号处理系统用于调制解调空间信号,并通过功分器、信标机等将空间信号转换成一个直观的数字量,将该数字量作为伺服控制系统的一个输入控制量。伺服控制系统通过各种传感器获取天线指向状态,然后根据输入控制量信息输出相应的输出控制信号,来控制电机驱动天线修正其指向,以达到移动中对星、随动跟踪的功能。
1.2伺服随动系统结构设计
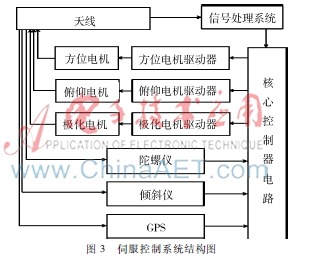
伺服控制系统是车载“动中通”系统的核心,天线的对星运动都是由伺服控制系统负责。该系统主要由单片机C0851F120、传感器、存储芯片、驱动电路、执行电机组成。该伺服控制系统采用C8051F120作为其核心控制器[4],如图2所示。
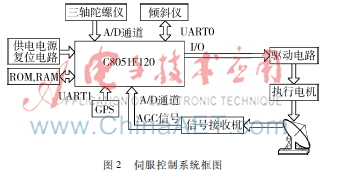
陀螺传感器反馈天线的转动角速度,控制器对该加速度进行积分便可获得转动的角度,这使得天线可以智能地转动各种指定角度;当载体运动范围比较大,需要重新测量天线理论方位俯仰时,GPS将测量当前载体的经纬度用于理论值的计算;倾斜仪测量天线俯仰相对于水平面的角度,根据倾斜仪的测量值可以知道天线的俯仰角值[5]。
传感器将测量值反馈到控制器中,控制器对各反馈信息进行识别、处理后产生控制信息,这些控制信息驱动着方位、俯仰及极化电机,带动天线进行初始化、盲扫、跟踪和随动,确保车载“动中通”系统能随时发现并跟踪锁定卫星以进行实时通信。伺服系统结构图如图3所示。
信号处理系统将一路信号输出给伺服控制系统中的信标机,信标机能根据空间信号强度输出一个相应的模拟量或者数字量AGC,根据该AGC可以判断天线指向是否接近并跟踪上卫星。
2伺服控制系统算法设计
该伺服系统采用模糊控制算法的FuzzyPID算法,防止卫星跑偏;采用圆锥扫描算法使天线持续、稳定地跟踪目标卫星。该系统结合这两种算法,能够不断调整自身的姿态,从而克服因载体运动而产生的天线指向误差,进而实现实时跟踪卫星实现运动中不间断通信。
2.1模糊PID算法
天线伺服控制系统若使用传统PID控制器,当理论值与实际值存在差值,积分环节就会不停地积分,最终可能会导致积分饱和[6],影响控制速度和精度,从而影响整个控制系统的性能。因此,车载“动中通”伺服系统使用模糊控制改变积分环节的控制。图4为模糊PID算法流程图。
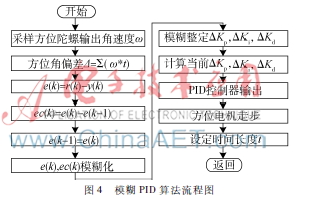
当理论值与实际值的偏差变大时,说明天线移动的方向与卫星方向背离[7],增大积分环节,阻止天线偏离卫星方向,将天线拉回卫星指向;当理论值与实际值的偏差变小时,说明天线移动的方向与卫星方向靠近,减小积分环节,天线指向逐步靠近卫星方向。
2.2圆锥扫描跟踪算法
无论载体怎么运动,天线都能始终准确地指向卫星,其关键在于天线的扫描算法[8]。该系统采用的是圆锥扫描跟踪算法。驱动电机让天线面绕指向卫星的中心轴画微小的圆,在捕获到目标卫星之后,通过圆锥扫描运动反馈的状态误差对天线进行闭环跟踪补偿。
在伺服控制系统中,信号处理系统将一路信号输出给伺服控制系统中的信标机,信标机根据空间信号强度输出一个相应的模拟量或者数字量AGC,再根据该AGC来判断天线指向是否接近并跟踪上卫星。
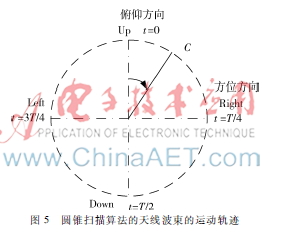
当天线对准目标同步卫星时,采集到的AGC信号是最大的,在采集到最大AGC信号的位置上下左右各采集4个点,以T为周期转圈,则4个点的采集时间为:t=0、T/4、T/2、3T/4的AGC信号,采集到的4个点的AGC值应该是相同的。如果不同,则表示天线的指向存在一定的偏差。不停重复这样的扫描过程,不停地比较偏离方向来调整天线的姿态,从而保证通信的稳定和持续性。圆锥扫描算法的天线波束的运动轨迹如图5所示。
记左右上下4点的AGC值分别为:L_AGC、R_AGC、U_AGC和D_AGC。实现程序如下:
if(i ==0)
R_AGC = CurrentAGC;
if(i ==TABLE_SIZE/4)
D_AGC = CurrentAGC;
if(i ==TABLE_SIZE/2)
L_AGC = CurrentAGC;
if(i ==TABLE_SIZE/4* 3)
图6Simulink系统框图U_AGC = CurrentAGC;
if(++i > = TABLE_SIZE) {
i = 0;
if(R_AGC >L_AGC) {
AZ_Error += DEGREE0_1;
}
else if(R_AGC <L_AGC) {
AZ_Error - = DEGREE0_1;
}
if(U_AGC>D_AGC) {
EL_Error + = DEGREE0_1;
}
else if(U_AGC< D_AGC) {
EL_Error - = DEGREE0_1;
}
}
3伺服系统模型搭建与仿真结果分析
为了验证该系统的可行性,对车载“动中通”系统进行了建模与仿真。车载“动中通”系统的建模与仿真建立在控制理论、相似理论、计算机理论的基础上,根据系统构成建立其数学模型并进行仿真,验证系统性能。
3.1系统模型搭建与仿真
(1)PWM功率放大电路数学模型
PWM功率放大电路其原理就是改变直流无刷电机输入控制电压的接通和断开的占空比从而改变直流无刷电机电枢的转动速度;当输入控制电压的极性改变时,MOSFET管状态会随之改变,从而改变输出控制电压的极性,进而改变直流无刷电机正转或反转。直流无刷电机输入控制电压的接通和断开在第二个周期时输出控制电压才会改变。由于输入控制电压与输出控制电压存在时间差,因此PWM功率放大电路存在一定的滞后。式(1)中,Kpwm是电压放大的倍数,Ts表示输入控制电压与输出控制电压滞后时间。则功率放大电路的传递函数为:
H(s)=Kpwme-Tss(1)
对式(1)按泰勒级数展开,可以知道输入控制电压与输出控制电压的滞后时间非常小,因此高次项系数可以忽略,对式(1)进行简化为:

同时由于输入控制电压与输出控制电压的滞后时间Ts非常小,可以进一步简化为:
H(s)=Kpwm(3)
(2)传感器数学模型
本文中的传感器是对天线实时位置信号的反馈,因此传感器数学模型可以用传递函数H(s)=1来表示。
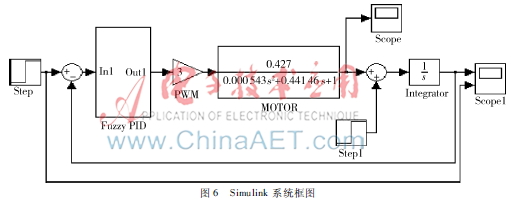
(3)建立系统模型
在MATLAB仿真软件中通过Simulink建立系统模型如图6所示。
3.2仿真结果分析
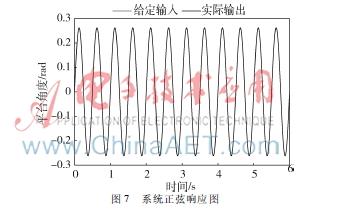
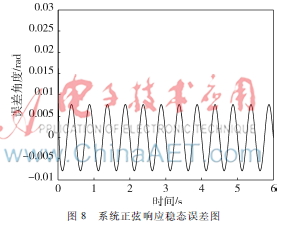
当给输入一个正弦控制信号时,正弦控制信号的幅度为π/12,设置频率为2 Hz。正弦控制信号的输出响应图如图7所示。由图7可以看出,给定输入灰色部分与实际输出黑色部分几乎重合,因此系统具有较好的动态性能和跟踪性能;系统稳态误差如图8所示,由此可以看出系统的稳态误差小于0.008,说明系统的稳定性较好。
车载“动中通”伺服控制系统通过GPS对当前载体所在位置进行测量,由设定的卫星参数计算得到理论方位,将理论值与实际值的偏差送到伺服控制系统中,从而得出电机为缩小偏差值所要转动的方向和角速度。天线运动后,再次计算理论值与实际值的偏差,不断重复形成一个闭环控制系统,逐步实现卫星的实际值与理论值的吻合,进而达到实时跟踪。
4结论
本文主要对车载“动中通”卫星通信系统中的伺服控制系统进行设计。车载“动中通”卫星通信系统的跟踪同步卫星的能力直接取决于伺服控制系统的稳定性。经过反复测试,该车载卫星通信系统在各种假想的工况环境下,能够在规定时间内准确对星并跟踪,满足设计性能指标。
参考文献
[1] 胡正飞,谢继东. 便携式卫星通信地球站结构及其控制系统设计[J].机电产品开发与创新,2006(3):46.[2] 梁佰祥.车载“动中通”卫星地球站伺服控制系统的研究与设计[D].南京:南京邮电大学,2012.
[3] 郭庆,王振永,顾学迈.卫星通信系统[M].北京:电子工业出版社,2010.
[4] 张帅.一种新型的船用移动卫星通信系统[D].南京:南京邮电大学,2008.
[5] 周文虎.“动中通”用卫星实现应急通信[J].上海信息化,2010(8):4042.
[6] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[7] 韩春生,刘剑,汝福兴,等.基于PID算法的船舶航迹自动控制[J].自动化技术与应用,2012,31(4):912.
[8] 王鹏程.基于复合控制技术的陆上移动卫星通信地球站设计与实现[D].南京:南京邮电大学,2013.