

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介Peer to Peer 通信功能可以应用在主从应用负载,例如两个电动机之间是通过硬轴刚性连接,拖动同一负载,要求两个电动机时刻输出相同的转矩,即达到负荷平衡,所以可以采用主从控制
Peer to Peer通信功能可以应用在主从应用负载,例如两个电动机之间是通过硬轴刚性连接,拖动同一负载,要求两个电动机时刻输出相同的转矩,即达到负荷平衡,所以可以采用主从控制方案,主电动机做带编码器的速度闭环矢量控制,主速度给定来自主站;从电动机也做带编码器的速度闭环矢量控制加力矩限幅,从速度给定来自主实际输出频率+5%的附加给定或者主站给定+5%的附加给定,让从站一直处于速度饱和状态,从力矩限幅值则来自主实际力矩输出。 实际上从也可以直接做转矩控制,转矩给定来自主实际输出转矩。相关参数设置如下: 从站7相关参数设置: P0700=6:起动命令来自DP通信; P1000=6:频率设定来自DP通信; P0918=7:DP地址为7; P0922=999:自由报文方式; P2051.0=2050.0:从站7向主站返回的第一个字是主站向从站7发送的控制字P2051.1=21:从站7向主站返回的第二个字是从站7的实际输出频率; P2051.2=31:从站7向主站返回的第三个字是从站7的实际输出转矩。 从站8相关参数设置: P0700 =6:起动命令来自DP通信; P1000 =6:频率设定来自DP通信; P0918 =8:DP地址为8; P0922= 999:自由报文方式; P2051.0=52:从站8向主站返回的第一个字是从站8的状态字; P2051.1=21:从站8向主站返回的第二个字是从站8的实际输出频率; P2051.2=31:从站8向主站返回的第三个字是从站8的实际输出转矩; P1522=2050.2:从站8的转矩限幅来自从站7向主站返回第三个字,即从站7的实际输出转矩; P1075 =755.0:5%的附加给定来自模拟量输入1; P1120=P1121=0:从站8的加速和减速时间设定为0,因为从站8的加速和减速时间是由从站7的输出频率变化决定。 从站7和从站8的硬件组态和报文设置如图11-19和图11-20所示。在图11-19中,从站7硬件组态的报文是None,而参数P0922设置为999,即自由报文方式,主站向从站7发送指令的地址范围是256~ 259,从站7向主站广播返回的地址范围是256~ 261。在图11-20中,从站8硬件组态的报文是None,而参数P0922设置为999,即自由报文方式,从站8向主站广播返回的地址范围是272~ 277,从站8接收的指令则来自从站7向主站广播返回三个字地址区256/258/260内的值,需要设定为Data exchange broadcast才能更改。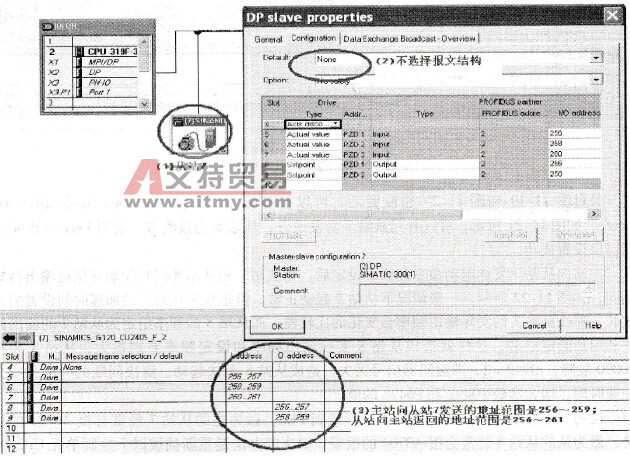 图11-19 从站7的硬件组态和报文设置
图11-19 从站7的硬件组态和报文设置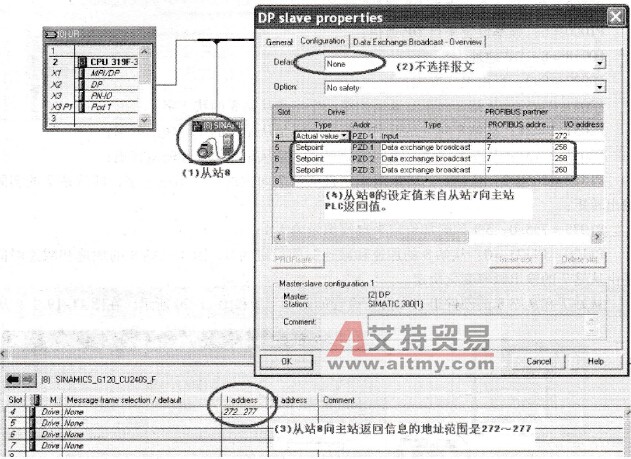 图11-20 从站7的硬件组态和报文设置 经过图11-19和图11-20的设置后,可以打开标签“Data Exchange Broadcast-Over-vlew”,如图11-21所示,可以看到从站7为发送方,从站8为接收方,说明Peer to Peer功能已经设置成功。
图11-20 从站7的硬件组态和报文设置 经过图11-19和图11-20的设置后,可以打开标签“Data Exchange Broadcast-Over-vlew”,如图11-21所示,可以看到从站7为发送方,从站8为接收方,说明Peer to Peer功能已经设置成功。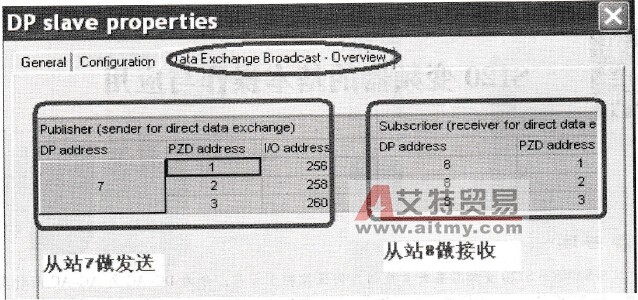 图11-21 DP从站属性
图11-21 DP从站属性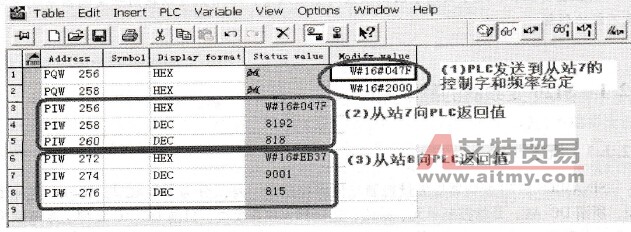 图11-22 从站显示数据 主站向从站7发送起动命令和频率设定后,则从站7和从站8同时起动并保持输出转矩相同,如图11-22所示。一般情况下从站7起动正常,但是如果从站7的加速时间设置的比较长,那么从站7的实际输出频率会变化的比较慢,而从站8的频率给定为从站7的输出频率和附加给定之和,这样就造成从站8实际输出频率和设定频率差别很大,从站8会报F0090故障,r0949=2,即编码器信号丢失,造成从站8无法起动,解决问题的办法是减少加速时间,增大参数P0492和P0494的值。 说明:硬件组态和报文设置完成后下载到PLC,做为主的从站7经常会报A0703的报警,做为从的从站8经常会报A0704的报警,解决的办法是重新插拔以下控制单元CU240S DPF,或者断电后重新上电即可消除这些报警。
图11-22 从站显示数据 主站向从站7发送起动命令和频率设定后,则从站7和从站8同时起动并保持输出转矩相同,如图11-22所示。一般情况下从站7起动正常,但是如果从站7的加速时间设置的比较长,那么从站7的实际输出频率会变化的比较慢,而从站8的频率给定为从站7的输出频率和附加给定之和,这样就造成从站8实际输出频率和设定频率差别很大,从站8会报F0090故障,r0949=2,即编码器信号丢失,造成从站8无法起动,解决问题的办法是减少加速时间,增大参数P0492和P0494的值。 说明:硬件组态和报文设置完成后下载到PLC,做为主的从站7经常会报A0703的报警,做为从的从站8经常会报A0704的报警,解决的办法是重新插拔以下控制单元CU240S DPF,或者断电后重新上电即可消除这些报警。







