

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 . PID 的基本构成 图 3. 13(a) 所示为 PID 控制参数 Pr. 128=10 或 11 (偏差信号输入)时的原理,图 3. 13(b) 所示为 Pr. 128= 20 或 21 (测定信号输入)时的原理。 2 . PID 动作过程 图 3. 14 所示
1.PID的基本构成 图3. 13(a)所示为PID控制参数Pr. 128=10或11(偏差信号输入)时的原理,图3. 13(b)所示为Pr. 128= 20或21(测定信号输入)时的原理。 2.PID动作过程 图3. 14所示为PID调节参数Pr. 129、Pr. 130和Pr. 134设定之后的动作过程,称为P动作、I动作和D动作的三者之和。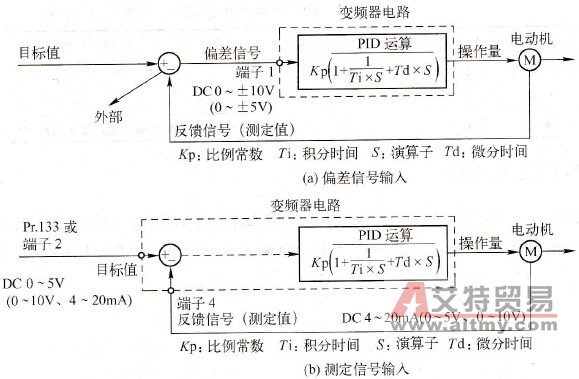 图3. 13 PID框图 3.PID的自动切换 为了加快PID控制运行时开始阶段的系统上升过程,可以仅在启动时以通常模式上升。Pr.127可以设置自动切换频率,从启动到Pr.127以通常模式运行,待频率达到该设定值后,才转为PID控制。如图3.15所示为PID自动切换控制。当然,从图中也可以看出,Pr. 127的设定值仅在PID运行时有效,其他阶段无效。
图3. 13 PID框图 3.PID的自动切换 为了加快PID控制运行时开始阶段的系统上升过程,可以仅在启动时以通常模式上升。Pr.127可以设置自动切换频率,从启动到Pr.127以通常模式运行,待频率达到该设定值后,才转为PID控制。如图3.15所示为PID自动切换控制。当然,从图中也可以看出,Pr. 127的设定值仅在PID运行时有效,其他阶段无效。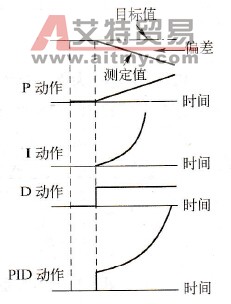 图3. 14 PID动作过程 4.PID信号输出功能 在很多控制案例中,需要输出PID控制过程的各种状态,尤其是PID目标值、PID测定值和PID偏差值。A700变频器提供了这些信号直接输出到CA和AM端子,具体设定参数如表3.4所示。
图3. 14 PID动作过程 4.PID信号输出功能 在很多控制案例中,需要输出PID控制过程的各种状态,尤其是PID目标值、PID测定值和PID偏差值。A700变频器提供了这些信号直接输出到CA和AM端子,具体设定参数如表3.4所示。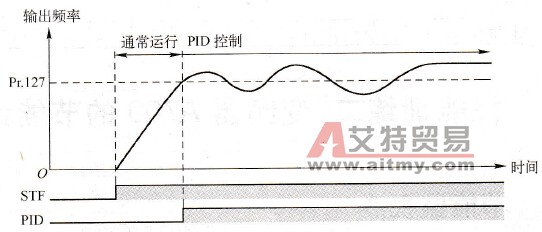 图3. 15 PID自动切换控制 表3.4 PID信号输出功能
图3. 15 PID自动切换控制 表3.4 PID信号输出功能 5.PID的正、负作用 在PID作用中,存在两种类型,即负作用与正作用。负作用是当偏差信号(目标值一测量值)为正时,增加频率输出,如果偏差为负,则频率输出降低。正作用的动作顺序刚好相反,具体如图3. 16所示。
5.PID的正、负作用 在PID作用中,存在两种类型,即负作用与正作用。负作用是当偏差信号(目标值一测量值)为正时,增加频率输出,如果偏差为负,则频率输出降低。正作用的动作顺序刚好相反,具体如图3. 16所示。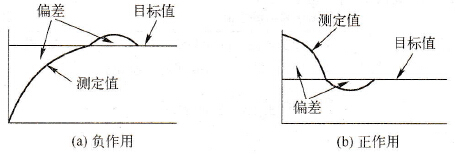 图3.16 正、负作用 以温度控制为例,在冬天的暖气控制时为负作用,如图3. 17所示;在夏天的冷气控制时为正作用,如图3.18所示。
图3.16 正、负作用 以温度控制为例,在冬天的暖气控制时为负作用,如图3. 17所示;在夏天的冷气控制时为正作用,如图3.18所示。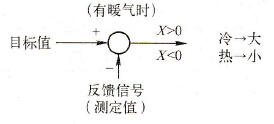 图3. 17 温度负作用
图3. 17 温度负作用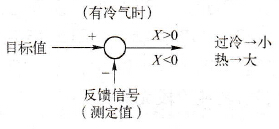 图3.18 温度正作用 正、负作用与偏差如表3.5所示。 表3.5 正、负作用与偏差
图3.18 温度正作用 正、负作用与偏差如表3.5所示。 表3.5 正、负作用与偏差







