

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介速度调节器 ASR 的结构如图 4.6 所示,图中 Kp 为比例增益, KI 为积分时间。积分时间设为 0 时,则无积分作用,速度环为单纯的比例调节器。由于是无速度传感器矢量控制方式,速度环
速度调节器ASR的结构如图4.6所示,图中Kp为比例增益,KI为积分时间。积分时间设为0时,则无积分作用,速度环为单纯的比例调节器。由于是无速度传感器矢量控制方式,速度环的实际速度来源于变频器内部的实际计算值。 图4.6 速度调节器简化框图 速度调节器ASR的整定参数包括比例增益P和积分时间I,其数值大小将直接影响矢量控制的效果,其目标就是要取得动态性能良好的阶跃响应(见图4.7(a))。具体调节的影响情况如下。 (1)增大比例增益P,可加快系统的动态响应,但P值过大,系统容易振荡。 (2)减小积分时间I值,可加快系统的动态响应,但I值过小,系统超调就会增大,且容易产生振荡。 (3)通常先调整比例增益P值,在保证系统不振荡的前提下尽量增大P值,然后调节积分时间I值使系统既有快速的响应特性又超调不大。 图4.7(b)所示是比例增益P值与速度调节器ASR的阶跃响应关系,图4-7(c)所示是积分时间I值与速度调节器ASR的阶跃响应关系。
图4.6 速度调节器简化框图 速度调节器ASR的整定参数包括比例增益P和积分时间I,其数值大小将直接影响矢量控制的效果,其目标就是要取得动态性能良好的阶跃响应(见图4.7(a))。具体调节的影响情况如下。 (1)增大比例增益P,可加快系统的动态响应,但P值过大,系统容易振荡。 (2)减小积分时间I值,可加快系统的动态响应,但I值过小,系统超调就会增大,且容易产生振荡。 (3)通常先调整比例增益P值,在保证系统不振荡的前提下尽量增大P值,然后调节积分时间I值使系统既有快速的响应特性又超调不大。 图4.7(b)所示是比例增益P值与速度调节器ASR的阶跃响应关系,图4-7(c)所示是积分时间I值与速度调节器ASR的阶跃响应关系。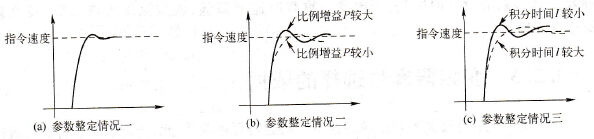 图4.7 速度调节器ASR的阶跃响应与PI参数的关系 一般的矢量变频器为了适应电动机低速和高速带载运行都有快速响应的情况,都设有两套PI参数值(低速PI值和高速PI值),同时设有切换频率。为了保证两套PI值的正常过渡,一些变频器还另外设置了两个切换频率,即切换频率1和切换频率2,如图4.8所示。其控制原理是:低于切换频率1的频率动态响应PI值取A点的数值,高于切换频率2的频率动态响应PI值取B点的数值,位于切换频率1和切换频率2之间的频率动态响应PI值取两套PI参数的加权平均值。
图4.7 速度调节器ASR的阶跃响应与PI参数的关系 一般的矢量变频器为了适应电动机低速和高速带载运行都有快速响应的情况,都设有两套PI参数值(低速PI值和高速PI值),同时设有切换频率。为了保证两套PI值的正常过渡,一些变频器还另外设置了两个切换频率,即切换频率1和切换频率2,如图4.8所示。其控制原理是:低于切换频率1的频率动态响应PI值取A点的数值,高于切换频率2的频率动态响应PI值取B点的数值,位于切换频率1和切换频率2之间的频率动态响应PI值取两套PI参数的加权平均值。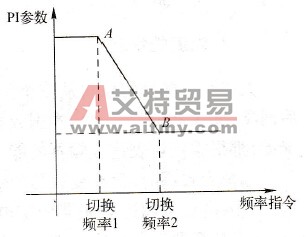 图4.8 PI参数与频率切换的关系 如果PI参数设置不当,系统在快速启动到高速后,可能产生减速过电压故障(如果没有外接制动电阻或制动单元),这是由于在速度超调后的下降过程中系统再生制动状态能量回馈所致,因此合适的PI值对于系统的稳定性至关重要。
图4.8 PI参数与频率切换的关系 如果PI参数设置不当,系统在快速启动到高速后,可能产生减速过电压故障(如果没有外接制动电阻或制动单元),这是由于在速度超调后的下降过程中系统再生制动状态能量回馈所致,因此合适的PI值对于系统的稳定性至关重要。







