![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介(1) 在 RSLogix5000 中,创建一个新的工程,命名为 Motion Drive ,如图 7-35 所示。 (2) 右击 I/O Configuration ,点击 New Module ,选择 PowerFlex 700S 2-400V ,点击 OK 按钮,选择主要版本,点击 OK 按钮
(1)在RSLogix5000中,创建一个新的工程,命名为Motion Drive,如图7-35所示。 (2)右击I/O Configuration,点击New Module,选择PowerFlex 700S 2-400V,点击OK按钮,选择主要版本,点击OK按钮,进行变频器的配置,选择通信格式为Morion Control。槽号默认为2,不可更改,然后点击Next按钮,如图7-36所示。 (3)将变频器的RPI时间设置为3ms,然后点击Next按钮,如图7-37所示。 (4)在如图7-38所示的画面上点击New Axis按钮,新建一个轴。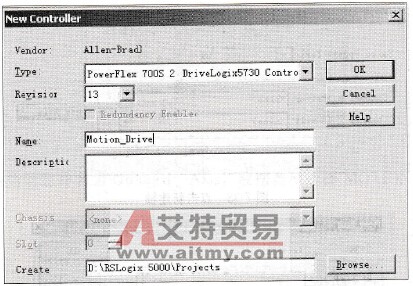 图7-35 创建工程
图7-35 创建工程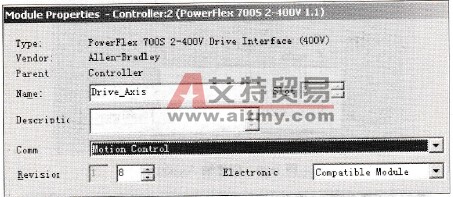 图7-36 将变频器配置为Motion Control
图7-36 将变频器配置为Motion Control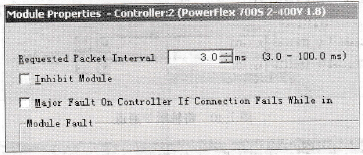 图7-37 设置变频器的RPI时间 (5)创建两个名为Axis00和Axis01的轴,数据类型选择AXIS _ (JENERIC,如图7-39所示。 (6)回到配置变频器的画面,将两个轴分别赋予Channeio和Channell,然后点击Next按钮,如图7-40所示。 (7)选择正确的变频器额定数据,然后点击Finish按钮,如图7-41所示。 (8)在Motion Groups上右击,选择New Motion Group,创建一个新的运动组,如图7-42所示。
图7-37 设置变频器的RPI时间 (5)创建两个名为Axis00和Axis01的轴,数据类型选择AXIS _ (JENERIC,如图7-39所示。 (6)回到配置变频器的画面,将两个轴分别赋予Channeio和Channell,然后点击Next按钮,如图7-40所示。 (7)选择正确的变频器额定数据,然后点击Finish按钮,如图7-41所示。 (8)在Motion Groups上右击,选择New Motion Group,创建一个新的运动组,如图7-42所示。 图7-38 点击新建轴
图7-38 点击新建轴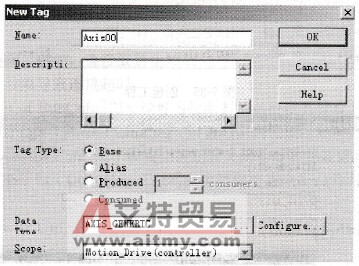 图7-39 创建轴Axis00
图7-39 创建轴Axis00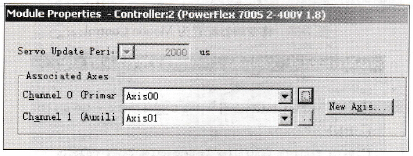 图7-40 将轴赋予通道
图7-40 将轴赋予通道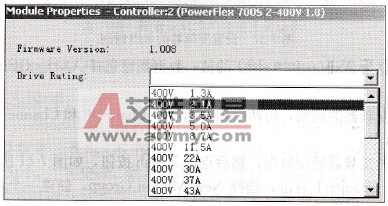 图7-41 选择变频器的额定数据
图7-41 选择变频器的额定数据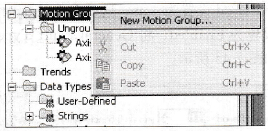 图7-42 新建一个新的运动组 (9)将新的运动组命名为Grouped_Axis,数据类型选择MOTION_ GROUP,如图7-43所示。
图7-42 新建一个新的运动组 (9)将新的运动组命名为Grouped_Axis,数据类型选择MOTION_ GROUP,如图7-43所示。 图7-43 创建一个新的运动组 (10)点击Configuration按钮,出现运动组的配置画面,选择轴,点击Add按钮,将一个轴添加到新建的运动组中,这里将Axis01和Axis02都添加到Grouped Axis组中。然后点击“下一步”按钮,如图7-44所示。
图7-43 创建一个新的运动组 (10)点击Configuration按钮,出现运动组的配置画面,选择轴,点击Add按钮,将一个轴添加到新建的运动组中,这里将Axis01和Axis02都添加到Grouped Axis组中。然后点击“下一步”按钮,如图7-44所示。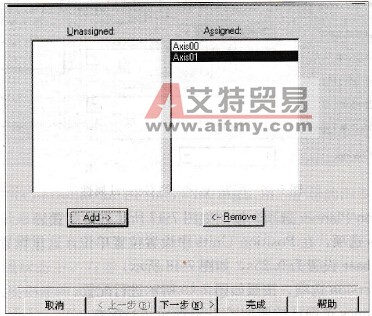 图7-44 将轴添加到运动组中 (11)将Coarse updat Period设置为4ms,这是DriveLogix Motion可以使用的最小时间。将Auto Tag Update设置为Enabled,将General Fault Type设置为Non Major Fault,然后点击“完成”按钮,如图7-45所示。
图7-44 将轴添加到运动组中 (11)将Coarse updat Period设置为4ms,这是DriveLogix Motion可以使用的最小时间。将Auto Tag Update设置为Enabled,将General Fault Type设置为Non Major Fault,然后点击“完成”按钮,如图7-45所示。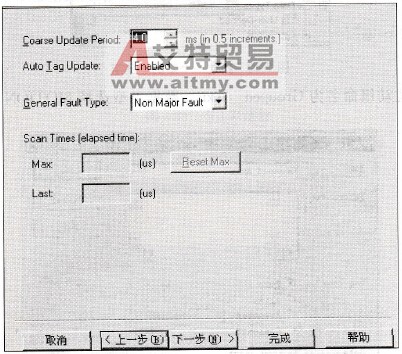 图7-45 配置运动组 (12)配置轴Axis00,在Axis00上右击,选择Properties,在General选项中,按照图7-46进行轴的配置。模块要选择I/OConfigruration中变频器的名称。通道0只能用于Servo Axis,通道1只能用于feedback。
图7-45 配置运动组 (12)配置轴Axis00,在Axis00上右击,选择Properties,在General选项中,按照图7-46进行轴的配置。模块要选择I/OConfigruration中变频器的名称。通道0只能用于Servo Axis,通道1只能用于feedback。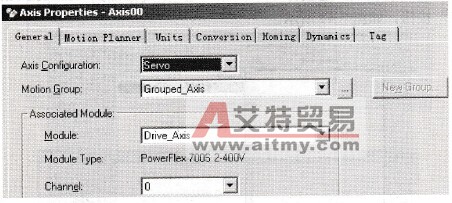 图7-46 配置Axis00的Gcneral属性 (13)选择Motion Planner选项,按照如图7-47所示进行配置。 (14)选择Units选项,在Position Units中设置位置单位,这里设置为rev(圈),Average Velocity Timebase设置为0.25s,如图7-48所示。 (15)选择Conversion选项,按照如图7-49所示进行配置。 (16)选择Dynamics选项,按照如图7-50所示进行配置。 (17)选择Homing选项,按照如图7-51所示进行配置。关于Homing模式的说明,请查阅《DriveLogix5730Controller for PF700S with PⅡ》用户手册的图4-10。
图7-46 配置Axis00的Gcneral属性 (13)选择Motion Planner选项,按照如图7-47所示进行配置。 (14)选择Units选项,在Position Units中设置位置单位,这里设置为rev(圈),Average Velocity Timebase设置为0.25s,如图7-48所示。 (15)选择Conversion选项,按照如图7-49所示进行配置。 (16)选择Dynamics选项,按照如图7-50所示进行配置。 (17)选择Homing选项,按照如图7-51所示进行配置。关于Homing模式的说明,请查阅《DriveLogix5730Controller for PF700S with PⅡ》用户手册的图4-10。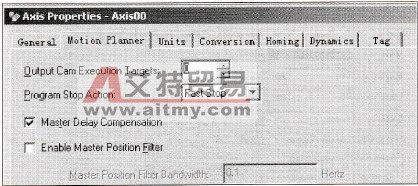 图7-47 配置Axis00的Motion Planner
图7-47 配置Axis00的Motion Planner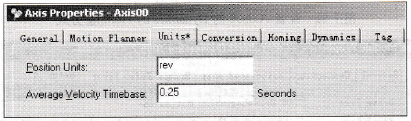 图7-48 配置Axis00的Units
图7-48 配置Axis00的Units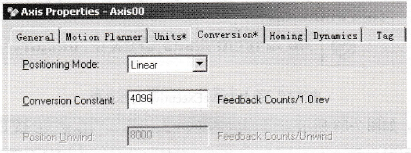 图7-49 配置Axis00的Conversion
图7-49 配置Axis00的Conversion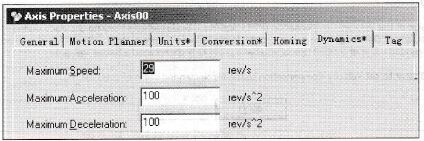 图7-50 配置Axis00的Dynamics (18)按照以E的步骤配置Axisl,注意,通道0只能配置Servo Axis,通道1可以用于Feedback only axis。保存工程并下载到控制器中。 (19)在程序离线状态下,右击PowerFlex700S 2,点击Properties,选择Setup选项,在Drive File中写入要创建的文件名称,点击Apply,如图7-52所示。 (20)点击Launch DriveExecutive,打开DriveExecutive软件。 (21)在DriveExecutive软件中,点击Drive,选择DriveLogix,会跳出以下的对话框,点击“是”按钮,如图7-53所示。
图7-50 配置Axis00的Dynamics (18)按照以E的步骤配置Axisl,注意,通道0只能配置Servo Axis,通道1可以用于Feedback only axis。保存工程并下载到控制器中。 (19)在程序离线状态下,右击PowerFlex700S 2,点击Properties,选择Setup选项,在Drive File中写入要创建的文件名称,点击Apply,如图7-52所示。 (20)点击Launch DriveExecutive,打开DriveExecutive软件。 (21)在DriveExecutive软件中,点击Drive,选择DriveLogix,会跳出以下的对话框,点击“是”按钮,如图7-53所示。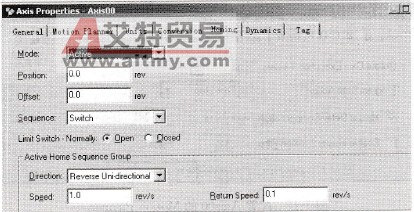 图7-51 配置Axis00的Dynamics的Homing方式
图7-51 配置Axis00的Dynamics的Homing方式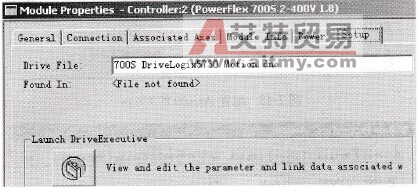 图7-52 命名DriveExecutive文件名称
图7-52 命名DriveExecutive文件名称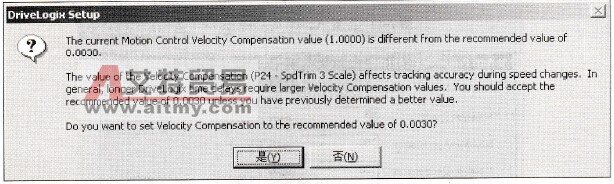 图7-53 DriveLogix Setup提示对话框 (22)然后跳出以下的对话框,提示你Motion需要配置以下这些参数和连接,点击“是”按钮能够自动为你进行配置,如图7-54所示。 (23)然后出现以下的对话框,提示你将Drive设置为Motion通信格式的Time Keeper,点击“是”按钮,如图7-55所示。 (24)查看此时的通信格式是否为Motion Control,点击OK按钮并关闭对话框,如图7-56所示。 (25)在link画面中,双击某个要被连接的参数,例如参数12[Speed Ref 2],选择link Source选项,在Find Parameter中填入要连接的参数号,如图7-57所示。
图7-53 DriveLogix Setup提示对话框 (22)然后跳出以下的对话框,提示你Motion需要配置以下这些参数和连接,点击“是”按钮能够自动为你进行配置,如图7-54所示。 (23)然后出现以下的对话框,提示你将Drive设置为Motion通信格式的Time Keeper,点击“是”按钮,如图7-55所示。 (24)查看此时的通信格式是否为Motion Control,点击OK按钮并关闭对话框,如图7-56所示。 (25)在link画面中,双击某个要被连接的参数,例如参数12[Speed Ref 2],选择link Source选项,在Find Parameter中填入要连接的参数号,如图7-57所示。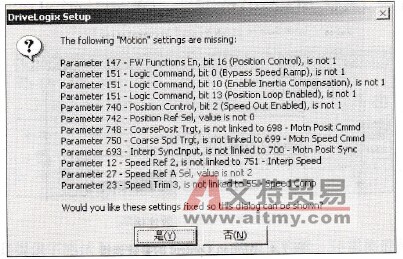 图7-54 DriveLogix Setup提示对话框
图7-54 DriveLogix Setup提示对话框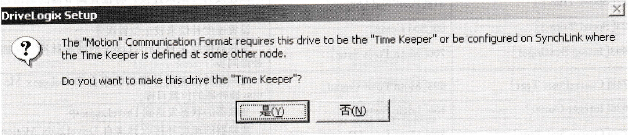 图7-55 将Drive设置为Time Keeper
图7-55 将Drive设置为Time Keeper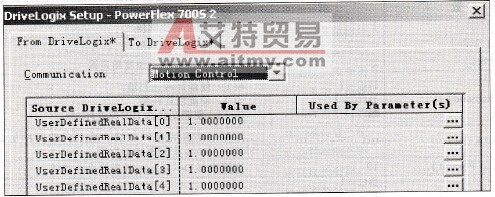 图7-56 通信格式已设置为Motion Control (26)按照以上的方法,设置如表7-4所示的参数连接,这是Motion Control通信格式必需的参数连接。 (27)为Motion Con_trol通信格式进行变频器的参数设置,需要设置的参数如表7-5所示。
图7-56 通信格式已设置为Motion Control (26)按照以上的方法,设置如表7-4所示的参数连接,这是Motion Control通信格式必需的参数连接。 (27)为Motion Con_trol通信格式进行变频器的参数设置,需要设置的参数如表7-5所示。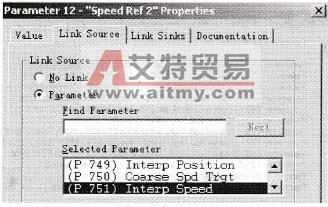 图7-57 设置参数连接 表7-4 Motion Control的参数连接
图7-57 设置参数连接 表7-4 Motion Control的参数连接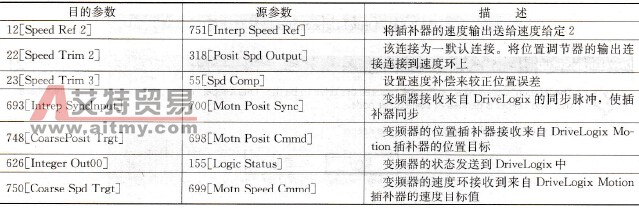 表7-5 需要设置的参数
表7-5 需要设置的参数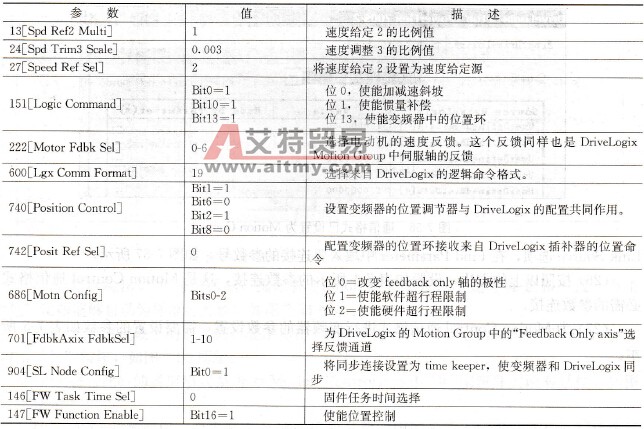 (28)使用跳出的RSLinx对话框找到变频器,下载设置并连接变频器,操作如图7-58所示。
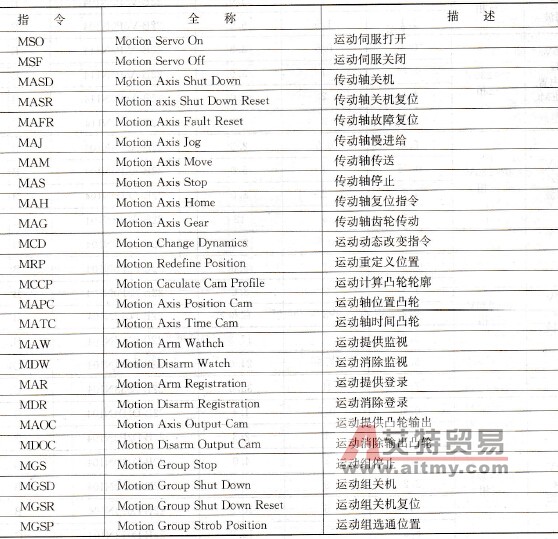
(28)使用跳出的RSLinx对话框找到变频器,下载设置并连接变频器,操作如图7-58所示。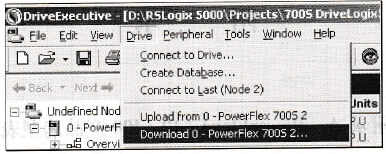 图7-58 下载变频器的设置 这个实验只是提供了测试DriveLogix motion的最低设置,还需要进行实际系统的动态测试并调节变频器。另外,可以在DriveLogix控制器中,使用如表7-6所示的运动控制指令来编程。 表7-6 运动控制指令
图7-58 下载变频器的设置 这个实验只是提供了测试DriveLogix motion的最低设置,还需要进行实际系统的动态测试并调节变频器。另外,可以在DriveLogix控制器中,使用如表7-6所示的运动控制指令来编程。 表7-6 运动控制指令