

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介ABB 公司的 ACS800 能够对速度进行精确的控制,根据不同的速度精度可以选择无脉冲编码器和有脉冲编码器两种。表 6.1 给出了在使用 DTC 直接转矩控制时的典型速度性能指标。 表 6.1 直接
ABB公司的ACS800能够对速度进行精确的控制,根据不同的速度精度可以选择无脉冲编码器和有脉冲编码器两种。表6.1给出了在使用DTC直接转矩控制时的典型速度性能指标。 表6.1 直接转矩控制速度性能指标
速度控制性能 无脉冲编码器 有脉冲编码器 静态速度误差(nN%) ±0.1%~0.5% (额定滑差率的10%) ±0.01% 动态速度误差 0.4% 0.1% 其中动态速度误差依赖于速度控制器的参数整定,图6.13所示为动态速度响应曲线。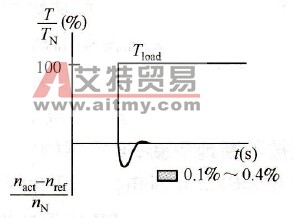 YN-电动机额定转矩;nN-电动机额定速度;nact-实际速度;nref-设定速度 图6.13 DTC直接转矩控制时的动态速度响应曲线 在参数组23中可以对速度控制器进行PID变量设定,速度控制器的原理见图6.14(a),该控制器包含了比例、微分、积分和微分加速度补偿,其经过PID作用后的输出作为转矩控制器的给定信号。
YN-电动机额定转矩;nN-电动机额定速度;nact-实际速度;nref-设定速度 图6.13 DTC直接转矩控制时的动态速度响应曲线 在参数组23中可以对速度控制器进行PID变量设定,速度控制器的原理见图6.14(a),该控制器包含了比例、微分、积分和微分加速度补偿,其经过PID作用后的输出作为转矩控制器的给定信号。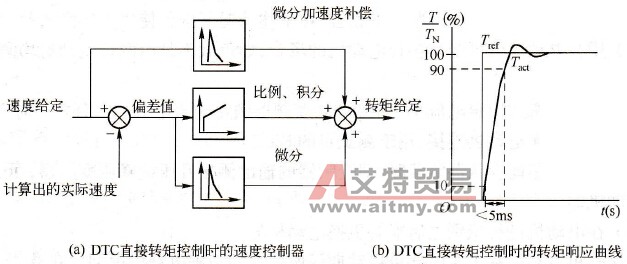 TN-电动机额定转矩;Tref-设定转矩;Tact-实际转矩 图6.14 DTC直接转矩控制 速度控制器的参数内容包括以下几方面。 (1)增益参数:定义速度控制器的比例增益,如增益过大可能引起速度波动。 (2)积分时间参数:定义速度控制器的积分时间,即在偏差阶跃信号下,控制器输出信号的变化率。积分时间越短,连续偏差值的校正就越快,但是如果太短,就会造成控制不稳定。 (3)微分时间参数:定义速度控制器的微分时间,即在偏差值发生改变的情况下增加控制器的输出。微分时间越长,在偏差改变的过程中,控制器的输出速度就越快。微分作用使控制对扰动的敏感度增加。 (4)加速补偿的微分时间:在加速过程中为了补偿惯性,将给定变化量的微分加到速度控制器的输出中。 (5)滑差增益:定义了电动机滑差补偿控制的滑差增益,100%表示完全滑差补偿,0%表示零滑差补偿。 速度控制器的参数值能在电动机辨识(与矢量控制的电动机辨识相同)整定期间进行自动调节,当然也可以手动整定控制器的相关参数,或是让变频器单独执行一次速度控制器自动整定运行。
TN-电动机额定转矩;Tref-设定转矩;Tact-实际转矩 图6.14 DTC直接转矩控制 速度控制器的参数内容包括以下几方面。 (1)增益参数:定义速度控制器的比例增益,如增益过大可能引起速度波动。 (2)积分时间参数:定义速度控制器的积分时间,即在偏差阶跃信号下,控制器输出信号的变化率。积分时间越短,连续偏差值的校正就越快,但是如果太短,就会造成控制不稳定。 (3)微分时间参数:定义速度控制器的微分时间,即在偏差值发生改变的情况下增加控制器的输出。微分时间越长,在偏差改变的过程中,控制器的输出速度就越快。微分作用使控制对扰动的敏感度增加。 (4)加速补偿的微分时间:在加速过程中为了补偿惯性,将给定变化量的微分加到速度控制器的输出中。 (5)滑差增益:定义了电动机滑差补偿控制的滑差增益,100%表示完全滑差补偿,0%表示零滑差补偿。 速度控制器的参数值能在电动机辨识(与矢量控制的电动机辨识相同)整定期间进行自动调节,当然也可以手动整定控制器的相关参数,或是让变频器单独执行一次速度控制器自动整定运行。







