![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
简介毛晶晶,汪远银,王森,于洋 (北京精密机电控制设备研究所,北京100010) 摘要:在LabVIEW和NI IMAQ Vision的软件平台下,利用通用图像采集设备开发了一种新型视频引伸计系统。通过调
毛晶晶,汪远银,王森,于洋
(北京精密机电控制设备研究所,北京100010)
摘要:在LabVIEW和NI IMAQ Vision的软件平台下,利用通用图像采集设备开发了一种新型视频引伸计系统。通过调用动态链接库驱动图像采集设备DH HV 1303UM进行图像采集,并通过NI IMAQ Vision完成了图像处理及基于灰度重心的视频引伸计的开发。该系统具有灵活性强、可靠性高、性价比高等优点。
关键词:虚拟引伸计;DLL;图像处理
0引言
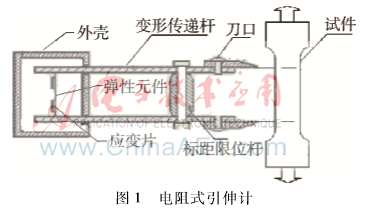
引伸计(extensometer) 是测量构件两点之间平均线应变的一种仪器。目前最常用的引伸计为如图1所示的电阻式引伸计。刀刃口与试件接触并将试件变形传递到变形传递杆上,再进一步传递到弹性元件,粘贴在弹性元件上的应变片感知应变并将其转换为电压变化后输出,最终通过测得的电压信号值获得应变的大小。此种引伸计在测量时需接触试件,需要导线引出信号,因此在测量柔性材料变形或者在特殊环境(如高温高压)中测量时存在困难。此外,因为应变片量程有限,且刀口间要有一定的距离,此种引伸计也不能测量微小试件的变形。
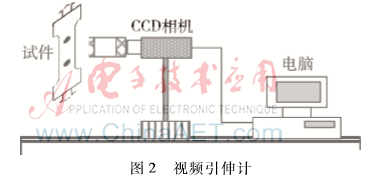
随着光电技术的发展以及光电产品的普及,基于最近发展起来的激光干涉引伸计、CCD相机图像采集以及数字图像分析的视频引伸计[1-3]得到越来越多的应用。视频引伸计如图2所示,它通过拍摄试件表面的图像,利用图像分析算法分析图像中标志点之间的变形来测量试件表面的应变。视频引伸计为非接触测量,因此可测量柔性试件,可在恶劣环境下测量,而且也可以测量微小试件和大变形,因此在新材料、新技术领域受到越来越多的重视。但与传统的电阻式引伸计相比,专业视频引伸计的价格相当昂贵,光照要求严格。这在一定程度上限制了视频引伸计的应用。
为了解决这些难题,本文介绍一种新型视频引伸计。该引伸计以虚拟仪器的开发软件LabVIEW为基本开发平台,实现视频引伸计必要的控制、计算和操作,并最终完成了一个成熟的﹑实时的视频引伸计的设计。
1视频引伸计原理
视频引伸计原理如图3所示,在试件上制作两个标记点,在加载时用CCD相机实时记录试件表面包含这两个标记点区域的数字图像,通过特殊设计数字图像处理算法识别标记点在变形前后的位置或者位移,再根据几何关系可得到两个标记点间的应变ε [4]。

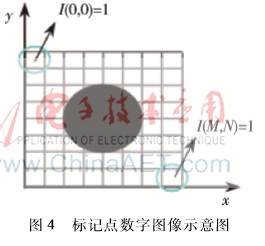
为了算法识别的方便,标识点一般设计为特定的形状。圆形标记点是一种常用的标记点,一般可以通过边界识别得到圆周上的点,再通过拟合求出圆心坐标。本文采用一种特殊的标记点识别方法,即灰度重心算法。灰度重心算法是将数字图像像素的灰度看作是数字图像的“密度”,认为图像中一个斑点的中心位于其“重心”处。相应地,对于一幅大小为M×N的灰度图像区域,如图4所示,设其每个像素的灰度值为I(i,j),(0<i<m,0<j<n),可以定义标记点的灰度重心坐标为:
在测量时用式(1)可检测出不同时刻图像上标记点的位置,根据同一标记点位置相对于初始时刻的变化可获得该标记点的位移。两个标记点的相对位移与初始时刻两标记点的距离L之比则为要测量的应变。
2视频引伸计的虚拟仪器实现
从上述视频引伸计原理中可知,视频引伸计的实现需要实时采集图像,然后对图像进行处理得到应变值。除此之外,为了使用方便,还需要有合理的操作界面供用户操作。本节介绍用LabVIEW实现视频引伸计的图像采集、图像处理及程序面板设计的工作。
2.1基于USB接口的图像采集
LabVIEW对NI公司自己生产的图像采集设备提供了相应的驱动和控制模块,这些采集设备应用起来较为方便,但存在价格昂贵且不易进行底层开发的缺点。目前,市面上常见的工业数字化相机多以USB、1394、以太网口以及专业的Camera Link为接口形式,其中多款USB接口的摄相机在性价比上有很大的优势。此外,USB接口成为PC的标配,在视频引伸计中采用USB接口的数字摄相机还能大大提高测量系统的灵活性。由于LabVIEW中并不提供与USB接口相机直接通信的标准模块,为实现在LabVIEW环境下控制USB接口相机的图像采集,需进行特殊开发。下面以大恒图像公司生产的DH HV 1303UM相机为例,介绍图像采集的实现过程。
大恒公司提供了DH HV 1303UM相机驱动的动态链接库,该动态链接库能完成相机的设置、图像的采集等常用功能,并提供了VC++、VB等常用开发环境下的调用函数。但没有提供LabVIEW平台下的接口,若要在LabVIEW平台下控制该相机,一个可行的方法是通过LabVIEW中Call Library Function模块调用动态链接库中相应的相机设置及采集函数。此时需注意在Call Library Function模块配置对话框中设置好动态链接库的名称和路径、函数的名称、数据的类型、返回值等内容,并注意将动态链接库函数参数的数据类型映射为相应的LabVIEW中的数据类型[5-6]。
需要指出的是,此方法不仅适用于USB接口相机,对于其他所有提供了动态链接库驱动程序的相机均可以用此方法实现与LabVIEW平台的连接。本文正是通过这样一个方法多次调用动态链接,完成引伸计的图像采集。该图像采集部分共分为六步:(1)打开相机并初始化;(2) 设置图像分辨率;(3)设置采集模式;(4)设置增益;(5)设置曝光时间;(6)图像输出。
2.2图像处理
原始图像采集后,如何正确完整地提取标记点的中心是图像处理部分所需完成的内容。这一部分是系统测量的核心,也直接决定系统测量分辨率和精度。实际测量中的图像均含有各种噪声,因此在用式(1)所示的灰度重心算法计算标记点位置之前,需要对图像进行很多预处理,包括滤波、二值化以及图像的形态学操作[7-8]等,其目的是去除图像中可能影响测量结果的噪声点,并增强标记点与背景的对比度,提高标记点定位的精度。
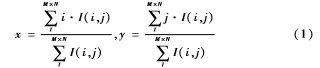
本系统中图像处理程序流程及在LabVIEW中实现相关操作的函数和处理效果如图5所示。第一步先对原始图像进行滤波和增强操作。在LabVIEW的VISION模块[9-10]中,提供了多种滤波算法,包括线性滤波法和非线性滤波法,有针对空域的和针对频域的滤波方法,也有频率域滤波法。可根据实际所采集的图像设置合理的滤波参数。经过多次实验,发现该系统采用有平滑作用的卷积滤波法,能够得到非常好的结果,因此决定图像处理中第一步先对图像进行卷积滤波操作。滤波完成后接着对图像实施二值化[11-12]操作。二值化操作是为了最大程度地增强标记点与背景图像的对比度。图像经过二值化分割后,不可避免地存在一些与检测对象像素值相似的干扰点或区域,这些点或区域需要在计算之前去除掉。在LabVIEW中可采取闭区域面积筛选的方法,即在图像处理中只保留与标记点面积大小相似的区域,与标记点面积相差较大的区域将予以剔除。因此只要在系统中设置合理的面积筛选区间,标记点便能正确提取出来。由于受到光照变化和相机内部噪声的影响,所提取的标记点图像会出现一些不规则的噪声点,这些噪声点将会对计算灰度重心有较大的影响。因此需要在计算灰度重心之前予以消除。一个可行的办法是对图像进行闭运算[13-15]。闭运算可以填平轮廓中细小的孔,弥合轮廓上的小缺口,而且目标特征的总的位置和形状不变。经过上述处理后,标记点图像变为一个纯净的、完全连通的、对比明显的二值化图像。用LabVIEW实现式(1)的计算后,可得标记点的坐标。
2.3系统程序的前面板设计
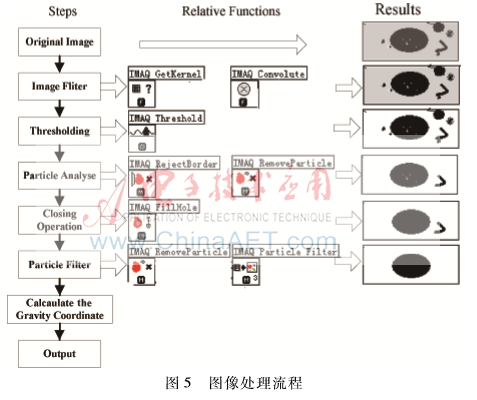
根据引伸实验的基本情况,设计视频引伸计的前面板如图6示。面板分为4个部分,分别完成相机参数设置﹑图像处理参数设置﹑原始图像和目标图像的显示及引伸实验的应变时间曲线显示。其中相机参数设置主要完成采集图像时曝光时间﹑增益﹑采集模式等设置;图像处理参数设置主要完成图像阈值区间的设定﹑所保留区域面积的设定及滤波相关参数的设定。
3系统标定及实验
3.1系统标定
在系统搭建完成后,需要确定系统测量的分辨率,由应变的定义可知,应变为试件的相对变形,因此此引伸计的分辨率可以通过两标记点之间位移的变化来测得,标定实验装置如图7所示。
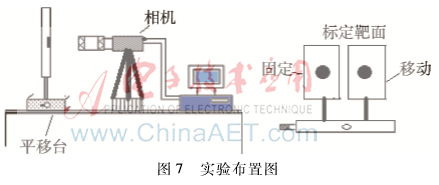
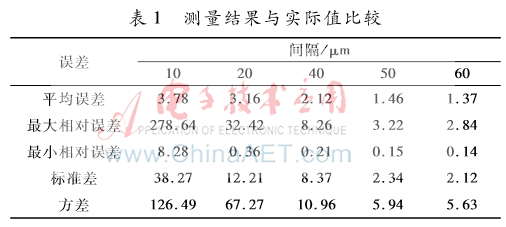
制作包含标记点的平板,其中一个固定,另一个可随精密平移台移动。平移台移动时两个标记的距离会发生变化,以此来模拟试件的拉伸实验。调节相机的放大倍率,使得一个像素相当于1 mm。将平移台移动间隔分别取10 μm、20 μm、40 μm、50 μm、60 μm(换算为图像分辨率为0.01、0.02、0.04、0.05和0.06像素)。对于每种移动间隔,分别移动精密平移台20次。将测量的结果与实际值相比较,其结果如表1所示。
调节相机的放大倍率,使得一个像素相当于40 μm,将平移台移动间隔分别取10 μm、500 μm,分别移动20次,系统所计算的结果与实际值的对比曲线如图8和图9所示。
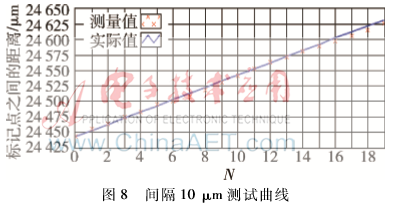
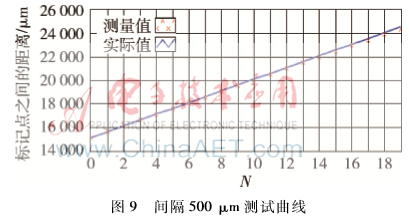
由表1实验数据可以看出,在图像分辨率为0.01像素、 0.02像素下系统误差较大。在图像分辨率为0.05像素、 0.06像素下系统误差无明显变化,最大相对误差小于3.5%。平均误差小于1.5 μm。因此系统的分辨率可取0.05像素。以CCD相机的分辨率为1 024×1 024来计算,此引伸计的应变测量分辨率约为48 με(0.05/1 024=48 με)。如果CCD相机的分辨率为2 048×2 048,则此引伸计的应变测量分辨率约为24 με。由图8和图9可以看出,该引伸计在大量程范围拥有较好的线性度和测量精度。
3.2系统应用
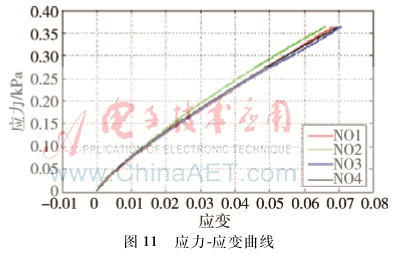
用橡皮制作4个相同的试件,在试件上做两个标记点,如图10所示,将试件夹持在MTS试验机上做拉伸试验,用引伸计实时记录试件的应变。配合试验机的相关数据,得到图11所示的4组应力应变曲线。 由图11可看出这4组应力应变曲线拥有较好的重合度,且本文所开发的引伸计所测的最大应变值可高达0.1。

4结论
本文提出了一种基于虚拟仪器的光学引伸计,在LabVIEW下完成了基于USB接口的图像采集和图像处理。该系统的整个外围硬件部分只需要一个普通的图像采集设备及一根USB传输线,系统结构简单、灵活。与应变片等传统接触式引伸计相比,除了精度更高之外,本系统的优势更在于适用于微小试样、柔性材料、变温环境和大形变实验等情况。在各类非接触式引伸计之中, 相比于传统的激光引伸计,本引伸计不利用激光的反射或者干涉,对环境的要求低,而且不需要大量的矫正算法,开发周期短,使用方便,而且更加稳定可靠;与传统视频引伸计相比,由于其在图像处理时采用合适的特征提取方法并利用LabVIEW开发程序及控制硬件的便利性,使得系统对硬件和对外界环境的要求大幅度降低,系统不需要特制的镜头和高精度CCD,不需要严格的特殊光照条件,由此大大降低了系统成本。
参考文献
[1] 王庆有,于涓汇.利用线阵CCD非接触测量材料变形量的方法[J].光电工程,2002,29(4):20-23.
[2] 徐亮,李新军,吕晓东.基于机器视觉非接触测量金属应变量[J].机械工程与自动化,2006(1):73-74.
[3] 张英杰.基于视频图像的应变精密测量研究[D].长春:吉林大学,2006.
[4] Wang Huaiwen,Kang Yilan, Fu Donghui, et al. Digital marker recognition method and it’s application of material behavior[J]. Chinese Journal of Energetic Materials, 2004, 17(5): 434-437.
[5] 刘玉. 利用动态连接库扩展Labview的功能[J]. 国外电子测量技术, 2004,23(S1):51-53.
[6] 谢其德,张云云. 动态链接库在LabVIEW中的高级应用[J]. 微计算机信息,2004,20(10):45-46.
[7] 陈月婷. 视频引伸计测量技术初探[J]. 工程与试验,2009(S1):50-53.
[8] 高宏阁.视频引伸计研发[D].天津:天津大学, 2005.
[9] BLUME P A. The LabVIEW style book[M]. Upper Saddle River: Prentice Hall,2009.
[10] National Instruments. IMAQ Vision User’s Manual[Z].2006.
[11] 张会林,简献忠. 人体手背静脉血管图像增强处理算法研究[J]. 仪器仪表学报,2005,26(8):730-731.
[12] 舒华, 余群. 基于LabVIEW的形态学图像处理研究[J]. 信息技术, 2009(5):142-144 .
[13] 金昊.基于虚拟仪器的计算机视觉系统的研究[J]. 计算机自动测量与控制,2000,19(1):30-32.
[14] RAFAEL C G, RICHARD E W. 数字图像处理(第二版)[M]. 阮秋琦,阮宇智,译.北京:电子工业出版社,2003.
[15] Dai Qingyun,Yu Yingling. The advanced of mathematical morphology in images processing[J].Control Theory and Applications,2001,18(4):479-481.