![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-03-23
简介孙志成, 王小鹏, 田俊伟 (兰州交通大学 电子与信息工程学院,甘肃 兰州 730070) 摘要:为提高三相不控整流电路的功率因数,降低输入电流的谐波含量,稳定输出电压,提出了一种三
孙志成, 王小鹏, 田俊伟
(兰州交通大学 电子与信息工程学院,甘肃 兰州 730070)
摘要:为提高三相不控整流电路的功率因数,降低输入电流的谐波含量,稳定输出电压,提出了一种三相不控整流电路的APFC校正方法。首先采用三相六开关Boost APFC 整流电路消除相间相互耦合;然后用带前馈的平均电流数字控制方法控制PWM整流电路,前馈环节为PWM比较器提供主要占空比信号,电流环则在主要占空比信号附近调节小的高频动态信号,负担较轻且响应快;最后调整采样时刻及PI调节器参数实现APFC校正。仿真实验表明,带前馈的平均电流数字控制方法控制的三相六开关 Boost APFC 整流电路功率因数接近于1,谐波含量较低且直流侧输出电压稳定波动很小。
关键词:功率因数;谐波含量;前馈;平均电流法;数字控制
中图分类号:TM461文献标识码:ADOI: 10.19358/j.issn.1674 7720.2016.20.007
引用格式:孙志成, 王小鹏, 田俊伟. 一种三相不控整流电路APFC校正方法[J].微型机与应用,2016,35(20):27 30.
0引言
三相有源功率因数校正(Active Power Factor Correction,APFC)电路工作机理复杂,校正方法繁琐,效果不理想,即使负载等效为电阻时,也不能获得令人满意的功率因数。主要原因为三相电压相互耦合,每一相的电流不仅由该相电压决定,而且还受到另外两相电压的影响;自身体积大,外围电路器件多,成本高等限制了它的实际应用[1]。因此,研究控制方法简单易行、电路结构简便的三相不控整流电路及功率因数高、谐波含量低、成本低廉的APFC系统具有很高的实用价值。
本文采用有零线的三相六开关Boost APFC电路,在平均电流法数字控制APFC校正的基础上,结合前馈控制,对三相不控整流电路进行APFC校正,调整采样时刻及PID控制器的参数,目的在于使电路的功率因数接近于1,谐波含量较低,输出电压稳定。
1电路拓扑结构
Boost PFC变换器本身输入电流纹波小,输出电压高,输入功率因数较高,电路结构简单,成本低,工作可靠度高[2]。本文采用双闭环Boost型APFC校正输入端电流波形,跟随输入端电压波形变化,通过脉冲宽度调制(Pluse Width Modulation,PWM)控制技术动态地调节占空比,减小输入电流和电压之间的相位差,从而提高功率因数(Power Factor,PF)值,降低总谐波失真(Total Harmonic Distortion,THD),同时保持输出直流电压的稳定。
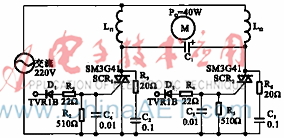
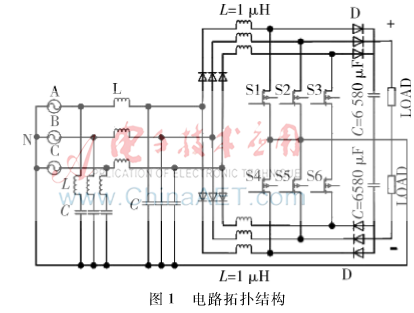
典型三相六开关Boost APFC电路是由6只功率开关器件组成的三相PWM整流电路,工作于电感电流连续模式,每个桥臂由上下两个开关管组成,每相电流可通过与该相连接的桥臂上的两只开关管进行控制。其优点是功率因数较高,谐波含量低,效率高,适用于中、大功率场合;缺点是开关器件多,控制复杂,每个桥臂上两只开关管存在直通短路的危险,对开关管驱动的可靠性有较高的要求。本文采用的电路拓扑为有零线的三相六开关Boost APFC升压型拓扑。如图1所示,该电路拓扑结构不仅具有典型三相六开关Boost APFC电路的优缺点,而且消除了相与相之间的
相互影响。以A、B两相为例,假设uAN>0,uBN<0,当开关管S1、S5同时导通时,由于电感电流不能突变,A相的电流流经S1之后不会再流入B相变换器;当开关管S1、S5同时关断时,也
是由于电感电流不能突变使得A相的电流不会再流入B相变换器[3]。这样便消除了开关管同时导通和关断时的相间耦合。
2控制方法
模拟控制中,信号的采样是实时连续的,输入电流的采样值可以实时连续地和电流参考值进行比较。然而对数字控制而言,信号的采样是不连续的。由于采样的不连续,必然导致输入电流采样值与实际电感电流的平均值有误差,进而引入附加的谐波畸变。为了减小数字平均电流控制相对于模拟平均电流控制附加的谐波畸变,电感电流的数字采样值必须尽可能地等于电感电流平均值。为达到这个目的,通常采用调整采样时刻和调整电流采样滤波的方法。本文采用数字控制,将采样时刻调整在三角载波的波谷位置,在这个时刻采样的电感电流值更接近于电感电流的平均值[4]。
平均电流法是通过控制输入电流的平均值,使其与输入整流电压同相位来实现功率因数校正。在平均电流控制技术的APFC电路中,采用电流控制环和电压控制环,其中电流控制环使输入电流更接近于正弦波,电压控制环使输出电压保持稳定。
带前馈平均电流控制法是在平均电流控制算法基础上增加一个前馈环节,增加前馈环节后,PWM比较器占空比信号不再由电流控制环的PI调节器输出单独决定,而是由调节器输出和前馈环节输出共同决定。前馈环节输出值取决于输入电压瞬时值和输出电压参考值。它提供了占空比信号的主要波形信息[5-6]。
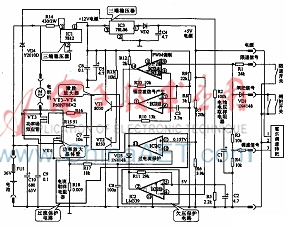
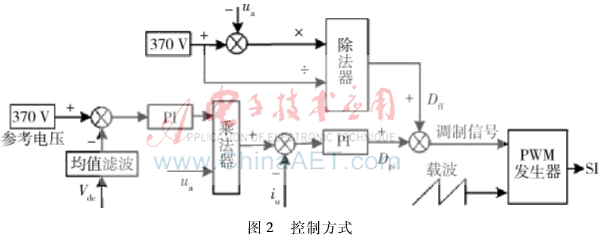
本文采用带前馈的平均电流法数字控制方式,如图2所示,Boost升压器输出电压Vdc经滤波后与参考电压370 V比较,判断输出电压是否与参考电压相等,如果不相等,则通过PI调节器调节使之与参考电压相等。PI调节器输出是一个直流值,是电压环的调节作用。整流桥输出电压ua是正弦半波电压波形,它与PI调节器的结果相乘后的信号还是保持正弦半波波形,并且与ua同相位。将乘法器的输出作为电流环的参考信号Iref,就可以保证被控的电感电流与电压波形一致。Iref的幅值与输出电压Vdc同参考电压的误差有关,也与ua的幅值有关。输入电流信号ia被采样后与基准电流信号Iref比较,其高频分量的变化通过电流误差放大器被平均化处理。放大后的平均电流信号Dpi与前馈环节的输出信号Dff一起与三角载波信号比较,共同为开关管S1提供PWM驱动信号并决定了其应有的占空比,使电感电流逼近电感平均电流。
3关键参数设计
本文设计主电路输入三相交流AC 176~220 V,直流侧输出电压DC 370 V,开关管工作频率24 kHz,负载5~15 kW,变换效率>0.95[7-10]。升压电感:

式中:

 ,计算得升压电感为800 μH,根据工程经验并考虑工程实现,本文选取1 000 μH[11]、硅钢材质、铝导线绕制;滤波电容
,计算得升压电感为800 μH,根据工程经验并考虑工程实现,本文选取1 000 μH[11]、硅钢材质、铝导线绕制;滤波电容

式中 取2%,ω为角频率,计算得滤波电容为6 058 μF/450 V[12-13],考虑工程实现,本文选取14个470 μF/450 V电解电容并联。
取2%,ω为角频率,计算得滤波电容为6 058 μF/450 V[12-13],考虑工程实现,本文选取14个470 μF/450 V电解电容并联。
4仿真实验与结果
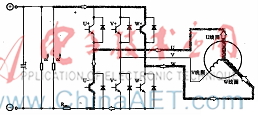
为了验证本文方法对功率因数、谐波含量以及稳定输出电压等指标的效果,利用有零线的三相六开关Boost APFC升压型拓扑搭建了三相不可控整流电路的Simulink仿真模型[14-16]并进行了仿真,电路模型如图3所示。
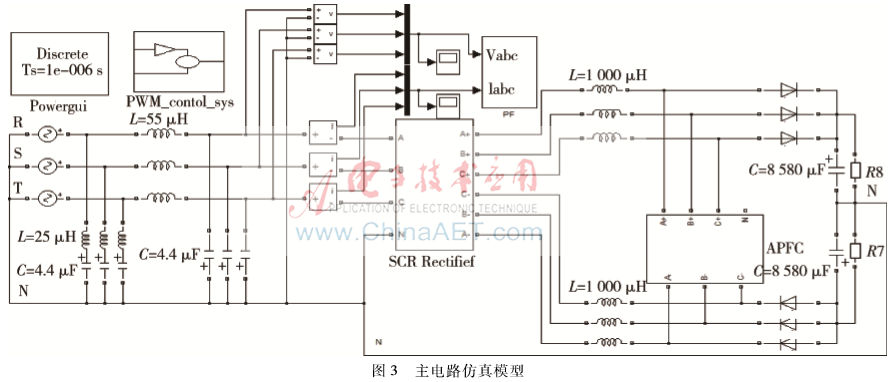
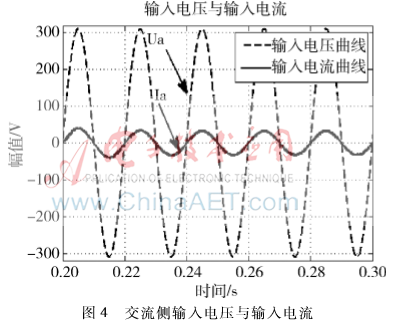
图4所示仿真结果表明,输入电流几乎完全跟随输入电压波形,二者相位差几乎为0,功率因数接近于1。
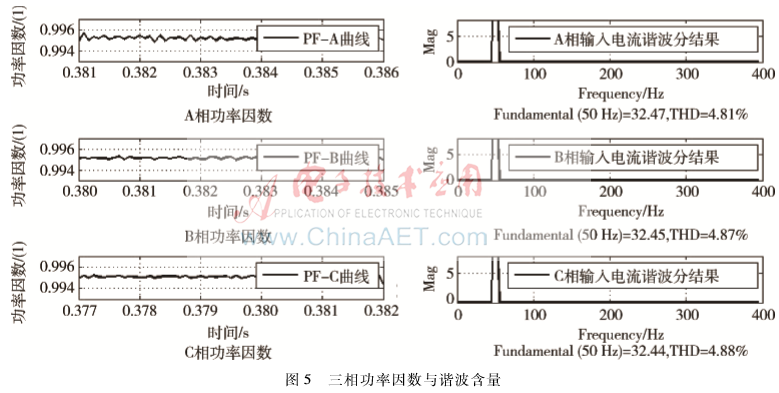
由于功率因数可以用输入电压和输入电流的相位差的余弦值来近似,所以本文搭建了监测输入电压与输入电流相位差余弦值的Simulink模型。图5为监测到的A、B、C三相功率因数约为0.995,PF>0.99;以及利用MATLAB FFT Analysis Tool分析A、B、C三相输入电流的THD约为4.90%。由于本文搭建的监测功率因数的模型比较简陋,监测到的PF值偏小,实际的PF约为0.998。
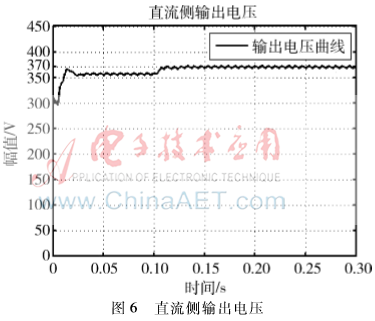
图6所示仿真结果表明,当整流电路稳定时,直流侧输出电压稳定在370 V,稳态波动范围是-371.8~371.8,波动很小。
5结束语
带前馈的平均电流数字控制算法简单易行,有零线的三相Boost整流电路结构简便且很好地消除了相间耦合。本文提出的方法通过仿真实验验证,有效地提高了三相不控整流器的功率因数,达到了约0.998;降低了输入电流的谐波含量,降低至约4.90%,直流侧输出的直流电压稳定且纹波很小。符合实际应用需求,可应用于工程实践。
参考文献
[1] 贲洪奇,张继红.开关电源中有源功率因数校正技术[M].北京:机械工业出版社,2010.
[2] Chen Zhe. Boost APFC device design[J]. Electrical Technology,2010(1): 45-50.
[3] 杜思涛,张淼.三相有源功率因数校正系统的研究[D].广州:广东工业大学, 2014.
[4] 王菁,王毅,刘志宇.基于 Boost 的单相数字平均电流法PFC研究[D].哈尔滨:哈尔滨工业大学,2008.
[5] 杨徐路,戚志东,李强.基于DSP的数字化APFC研究[D].南京:南京理工大学,2014.
[6] 吕新阁,王培良,秦会斌.基于DSP的单相APFC的研究与设计[D].杭州:杭州电子科技大学,2013.
[7] 王平,许强.基于DSP的APFC研究[D].武汉:华中科技大学,2009.
[8] 董秀芬.一种有源功率因数校正电路及控制方法的设计[J].微型机与应用,2012,31(19):35-39.
[9] 张岭,赵锦成,邵天章,等.基于数控电感的PWM整流器网侧电流改善研究[J].电子技术应用,2011,37(6):74-76.
[10] 王振宇,成立.一种高效反激式开关电源的设计与性能测试[J].电子技术应用,2008,16(04):66-69.
[11] 王玉峰,肖永江.单相Boost功率因数校正主电路模型的建立[J].电气传动自动化,2002,24(1):34-36.
[12] 傅晓帆.单相Boost型功率因数校正技术的研究[D].贵阳:贵州大学,2016.
[13] 董振旗,赵巍辉,刘耀辉,等.整流滤波电容的设计与选用方法研究[J].电子设计工程,2012,20(14):56-58.
[14] 洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真[M].北京:机械工业出版社,2006.
[15] 沈辉.精通SIMULINK系统仿真与控制[M].北京:北京大学出版社,2003.
[16] 钱素琴,黄新明.基于PID控制LLC微波电源的仿真研究[J].微型机与应用,2016,35(1):88-90,94.