

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介交流电机的转子能够产生旋转,是因为交流电机的定子能够产生旋转磁动势。而旋转磁动势是交流电机三相对称的静止绕组 A 、 B 、 C ,通过三相平衡的正弦电流所产生的。但是,旋转
交流电机的转子能够产生旋转,是因为交流电机的定子能够产生旋转磁动势。而旋转磁动势是交流电机三相对称的静止绕组A、B、C,通过三相平衡的正弦电流所产生的。但是,旋转磁动势并不一定非要三相不可,在空间位置上互相“垂直”;在时间(相位)上互差π/2电角度的两相通以平衡的电流,也能产生旋转磁动势。 直流电机转子能够产生旋转,是定子与转子之间磁场相互作用的结果。由于直流电机的电刷位置固定不变,尽管电枢绕组在旋转,但电枢绕组所产生的磁场与定子所产生的磁场在空间位置上永远互相“垂直”。如果以直流电机转子为参考点,那么定子所产生的磁场就是旋转磁动势。 由此可见,以产生同样的旋转磁动势为准则,三相交流绕组与两相直流绕组可以彼此等效。设等效两相交流电流绕组分别为α和β。直流励磁绕组和电枢绕组分别为M和T。彼此等效关系用结构图的形式画出来,便得到图5.6。从整体上看,输入为A、B、C三相电压,输出为转速ω,是一台异步电机。从内部看,经过3/2变换和2/3旋转变换(VR同步旋转变换),变成一台由im1和it1输入、ω输出的直流电机。其中φ是等效两相交流电流与直流电机磁通轴的瞬时夹角。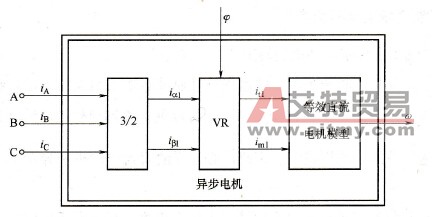 图5.6 异步电机的坐标变换结构 既然异步电机经过坐标变换可以等效成直流电机,那么模仿直流电机的控制方法,求得直流电机的控制量,经过相应的坐标反变换,就能够控制异步电机了。由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就叫做矢量变换控制系统(Transvector Control System),或称矢量控制系统(Vector Control System),所设想的结构如图5.7所示。图中给定和反馈信号经过类似于直流调速系统所用的控制器,产生励磁电流的给定信号i*m1,和电枢电流的给定信号i*t1,经过反旋转变换VR-1得到i*α1和i*β1,再经过2/3变换得到i*A、i*B、i*C。把这3个电流控制信号和由控制器直接得到的频率控制信号ω1加到带电流控制的变频器上,就可以输出异步电机调速所需的三相交频电流,实现了用模仿直流电机的控制方法去控制异步电机,使异步电机达到直流电机的控制效果。
图5.6 异步电机的坐标变换结构 既然异步电机经过坐标变换可以等效成直流电机,那么模仿直流电机的控制方法,求得直流电机的控制量,经过相应的坐标反变换,就能够控制异步电机了。由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就叫做矢量变换控制系统(Transvector Control System),或称矢量控制系统(Vector Control System),所设想的结构如图5.7所示。图中给定和反馈信号经过类似于直流调速系统所用的控制器,产生励磁电流的给定信号i*m1,和电枢电流的给定信号i*t1,经过反旋转变换VR-1得到i*α1和i*β1,再经过2/3变换得到i*A、i*B、i*C。把这3个电流控制信号和由控制器直接得到的频率控制信号ω1加到带电流控制的变频器上,就可以输出异步电机调速所需的三相交频电流,实现了用模仿直流电机的控制方法去控制异步电机,使异步电机达到直流电机的控制效果。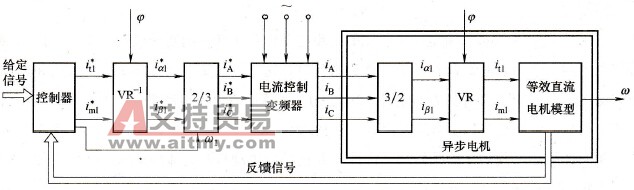 图5.7 矢量控制的结构 一般的矢量控制系统均需速度传感器,速度传感器是整个传动系统中最不可靠的环节,安装也麻烦。许多新系列的变频器设置了“无速度反馈矢量控制”功能。对于一些在动态性能方面并无严格要求的场合,速度反馈可以不用。
图5.7 矢量控制的结构 一般的矢量控制系统均需速度传感器,速度传感器是整个传动系统中最不可靠的环节,安装也麻烦。许多新系列的变频器设置了“无速度反馈矢量控制”功能。对于一些在动态性能方面并无严格要求的场合,速度反馈可以不用。







