

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介①升降机械设备负载。以起重机、卷扬机、电梯、抽油机等为代表的升降机械设备均要求在四象限运转。其特点是下放重物时,负载转矩大于平衡转矩,储存于负载中的位势能被释放出
①升降机械设备负载。以起重机、卷扬机、电梯、抽油机等为代表的升降机械设备均要求在四象限运转。其特点是下放重物时,负载转矩大于平衡转矩,储存于负载中的位势能被释放出来变成动能,负载拖着机械和异步电动机转动,此时异步电动机转矩方向和转速方向相反,呈发电状态,产生能量反馈。起重设备对调速的要求是能在较大范围内调速,尤其是低速段,以满足爬行和准确停车需要,对转速变化要求高,对速度变化率有限制,为确保按给定速度图运行,须有良好的速度跟随性能。当平衡重转矩等于负载转矩时,电动机转矩在零附近摆动,一会儿工作在电动状态,一会儿工作在再生状态,因此要求工作状态过渡必须平滑、可靠。例如,起重机将重物提升与放下时需要克服地球引力(重力),此时,重物与电动机运转的关系如图7-8所示。当异步电动机的能量输出为正时,异步电动机将电能转换为势能;反之,输出为负时,重物受地球引力的作用,势能反馈回电动机或由电磁制动器吸收。所以驱动四象限负载时,必须考虑到异步电动机和通用变频器不仅能进行电动状态驱动,而且也能进行回馈制动。回馈制动是通过加装制动电阻实现的,应特别注意制动电阻容量的选定。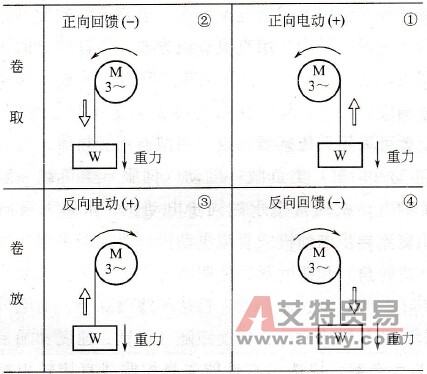 图7-8 四象限运行负载特性 对起重机等需要有定位控制的设备,尚需要选择电磁制动器,确定电磁制动器动作的时序,以及系统能否产生足够的制动转矩,还要考虑各部分之间的配合和运转顺序等。另外还必须确定通用变频器的能量回馈方式或制动方式。对于低速中小容量(1000kW以下)卷扬机,启动转矩一般不会出问题,稳速段速度固定,不要求调速,为保证准确停车,停车前应将频率调低,使其低速爬行一段时间后再停车。大中功率卷扬机,由于加减速缓慢,应考虑防止过电流问题,并应选用矢量控制型通用变频器及低速异步电动机驱动方案,可获得较好的控制特性。 对于具有大功率多绕组电动机的起重机,通常有卷上、升降机构、行走等装置。工程上用两台通用变频器分别驱动卷上用的多绕组电动机的不同绕组,并应在通用变频器的输入端分别加装专用电源再生回馈单元(PWM变流器)、电抗器和滤波器,以使在下降过程中将再生能量返回电源,消除谐波的影响。升降机构和行走装置可以采用共用直流母线方式,使各部分的再生能量能有效利用,如图7-9所示。卷上和升降机构要求有大的启动转矩和快速响应,因此,应采用带传感器矢量控制型通用变频器,而行走装置可采用无传感器矢量控制型通用变频器。 ②随动(伺服)类负载。随动(伺服)类负载一般功率不大,系统的电动机通常是永磁同步电动机、永磁无换向器电动机、三相交流异步电动机或直流电动机,要求四象限运行,机械的位置(或转角)和速度紧紧地跟随给定量变化,例如数控机床刀具和工作台的定位、注塑机、雷达天线跟踪等。对电气传动装置的基本要求是快速响应、精确跟随(位置、速度和加速度误差小)。对这类负载,应选用高性能矢量控制或直接转矩控制型通用变频器。
图7-8 四象限运行负载特性 对起重机等需要有定位控制的设备,尚需要选择电磁制动器,确定电磁制动器动作的时序,以及系统能否产生足够的制动转矩,还要考虑各部分之间的配合和运转顺序等。另外还必须确定通用变频器的能量回馈方式或制动方式。对于低速中小容量(1000kW以下)卷扬机,启动转矩一般不会出问题,稳速段速度固定,不要求调速,为保证准确停车,停车前应将频率调低,使其低速爬行一段时间后再停车。大中功率卷扬机,由于加减速缓慢,应考虑防止过电流问题,并应选用矢量控制型通用变频器及低速异步电动机驱动方案,可获得较好的控制特性。 对于具有大功率多绕组电动机的起重机,通常有卷上、升降机构、行走等装置。工程上用两台通用变频器分别驱动卷上用的多绕组电动机的不同绕组,并应在通用变频器的输入端分别加装专用电源再生回馈单元(PWM变流器)、电抗器和滤波器,以使在下降过程中将再生能量返回电源,消除谐波的影响。升降机构和行走装置可以采用共用直流母线方式,使各部分的再生能量能有效利用,如图7-9所示。卷上和升降机构要求有大的启动转矩和快速响应,因此,应采用带传感器矢量控制型通用变频器,而行走装置可采用无传感器矢量控制型通用变频器。 ②随动(伺服)类负载。随动(伺服)类负载一般功率不大,系统的电动机通常是永磁同步电动机、永磁无换向器电动机、三相交流异步电动机或直流电动机,要求四象限运行,机械的位置(或转角)和速度紧紧地跟随给定量变化,例如数控机床刀具和工作台的定位、注塑机、雷达天线跟踪等。对电气传动装置的基本要求是快速响应、精确跟随(位置、速度和加速度误差小)。对这类负载,应选用高性能矢量控制或直接转矩控制型通用变频器。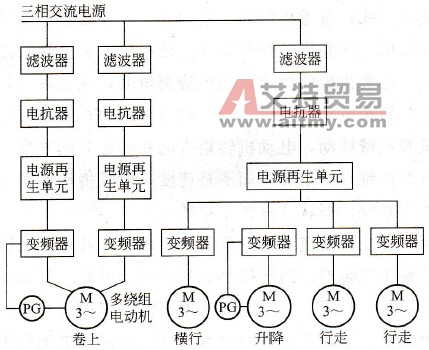 图7-9 起重机控制系统 ③快速正反转类负载。快速正反转类负载属于重复短期工作制类别,如可逆轧机主副传动、龙门刨床、挖土机等,工作时频繁启动、制动、加减速、正反转,其生产效率在很大程度上取决于电气传动系统的快速性,因此要求启动、制动、反转过程尽可能短,以满足高生产率和频繁操作的要求;要求能在较大范围内(1: 20以下)调速,以满足爬行和小行程时低速运转的需要,但对转速变化率要求不高;若负载转矩超过规定限度时,要求能快速可靠地堵转,以保护机械和电动机不致损坏,这对某些经常堵转的机械,例如挖土机、轧机等尤为重要。对这类负载,也应选用高性能矢量控制或直接转矩控制型通用变频器。
图7-9 起重机控制系统 ③快速正反转类负载。快速正反转类负载属于重复短期工作制类别,如可逆轧机主副传动、龙门刨床、挖土机等,工作时频繁启动、制动、加减速、正反转,其生产效率在很大程度上取决于电气传动系统的快速性,因此要求启动、制动、反转过程尽可能短,以满足高生产率和频繁操作的要求;要求能在较大范围内(1: 20以下)调速,以满足爬行和小行程时低速运转的需要,但对转速变化率要求不高;若负载转矩超过规定限度时,要求能快速可靠地堵转,以保护机械和电动机不致损坏,这对某些经常堵转的机械,例如挖土机、轧机等尤为重要。对这类负载,也应选用高性能矢量控制或直接转矩控制型通用变频器。







