

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介由于电动机磁通模型的建立必须依赖于电动机参数,因此选择无速度传感器矢量控制时,第一次运行前必须首先对电动机进行参数的调谐整定。目前新型矢量控制通用变频器中已经具备
由于电动机磁通模型的建立必须依赖于电动机参数,因此选择无速度传感器矢量控制时,第一次运行前必须首先对电动机进行参数的调谐整定。目前新型矢量控制通用变频器中已经具备异步电动机参数自动调谐、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行调谐后存储在相应的参数组中,并根据调谐结果调整控制算法中的有关数值。 自动调谐(因在电动机旋转情况下进行,又称旋转式调谐)的步骤一般是这样的:首先在变频器参数中输入需要调谐的电动机的基本参数,包括电动机的类型(异步电动机或同步电动机)、电动机的额定功率(单位kW)、电动机的额定电流(单位A)、电动机的额定频率(单位Hz)、电动机的额定转速(单位r/min);然后将电动机与机械设备分开,电动机作为单体;接着用变频器的操作面板指令操作,变频器的控制程序就会一边根据内部预先设定的运行程序自动运转,一边测定一次电压和一次电流,然后计算出电动机的各项参数。但在电动机与机械设备难以分开的场合却很不方便,此时可采用静止式调谐整定的方法,即将固定在任一相位,仅改变振幅而不产生旋转的三相交流电压施加于电动机上,电动机不旋转,由此时的电压、电流波形按电动机等值回路对各项参数进行运算,便能高精度测定控制上必需的电动机参数。在静止式调谐中,用原来方法无法测定的漏电流也能测定,控制性能进一步提高。利用静止式调谐技术,可对于机械设备组合在一起的电动机自动调谐,自动测定控制上所需的各项常数,因而显著提高了通用变频器使用的方便性。 从图4.5所示的异步电动机稳态等效电路中可以看出,电动机除了常规的参数如电动机极数、额定功率、额定电流外,还有R1(定子电阻)、X11(定子漏感抗)、R2(转子电阻)、X21(转子漏感抗)、Xm(互感抗)和I0(空载电流)。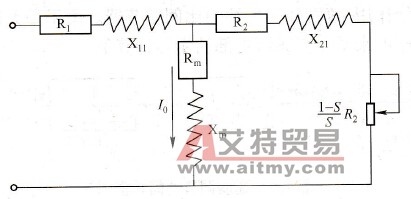 图4.5 异步电动机稳态等效电路 从上面已经知道,参数辨识分电动机静止辨识和旋转辨识两种,其中在静止辨识中,变频器能自动测量并计算定子和转子电阻,以及相对于基本频率的漏感抗,并同时将测量的参数写入;在旋转辨识中,变频器自动测量电动机的互感抗和空载电流。 在调谐整定过程中,必须注意以下几点。 (1)调谐过程如果出现过流或过压故障,可适当调整加减速时间和转矩补偿数值,并取消故障自动复位功能。 (2)在启动调谐前应确保电动机处于停止状态,否则调谐不能正常进行。 (3)调谐前必须确保输入电动机的铭牌参数准确无误,否则调谐后的电动机参数不准确。 (4)不同品牌、不同型号的变频器旋转调谐时从零速加速运行到的频率有些差异,有些是基本运行频率,有些则只有基本运行频率的50%或80%,具体可依据变频器的用户手册。 (5)如果现场情况无法对电动机进行调谐,可以参考同类电动机的已知参数手工输入,或者按照以下方式进行:先选择静止调谐,可依次计算出定子电阻、转子电阻和漏感抗3个参数,不测量电动机的互感抗和空载电流,用户可以根据电动机铭牌自行计算这两个参数,计算中用到的电动机铭牌参数有额定电压U、额定电流I、额定频率f和功率因数η,其中: 空载电流
图4.5 异步电动机稳态等效电路 从上面已经知道,参数辨识分电动机静止辨识和旋转辨识两种,其中在静止辨识中,变频器能自动测量并计算定子和转子电阻,以及相对于基本频率的漏感抗,并同时将测量的参数写入;在旋转辨识中,变频器自动测量电动机的互感抗和空载电流。 在调谐整定过程中,必须注意以下几点。 (1)调谐过程如果出现过流或过压故障,可适当调整加减速时间和转矩补偿数值,并取消故障自动复位功能。 (2)在启动调谐前应确保电动机处于停止状态,否则调谐不能正常进行。 (3)调谐前必须确保输入电动机的铭牌参数准确无误,否则调谐后的电动机参数不准确。 (4)不同品牌、不同型号的变频器旋转调谐时从零速加速运行到的频率有些差异,有些是基本运行频率,有些则只有基本运行频率的50%或80%,具体可依据变频器的用户手册。 (5)如果现场情况无法对电动机进行调谐,可以参考同类电动机的已知参数手工输入,或者按照以下方式进行:先选择静止调谐,可依次计算出定子电阻、转子电阻和漏感抗3个参数,不测量电动机的互感抗和空载电流,用户可以根据电动机铭牌自行计算这两个参数,计算中用到的电动机铭牌参数有额定电压U、额定电流I、额定频率f和功率因数η,其中: 空载电流 ![]() 互感抗
互感抗 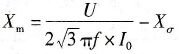 (Xσ代表漏感抗,是定子漏感抗X11和转子漏感抗X21之和) (6)为了保证控制性能,必须按变频器标准适配电动机进行电动机配置,若电动机功率与标准适配电动机的功率差距过大(功率差别一般在1~2级之间),变频器的控制将明显下降,或者配用高转差电动机等特殊电动机也将大大影响使用效果。 (7)如果在变频器与电动机之间接有电抗器或滤波器等配件,将影响到自动调谐的准确度,应该在进行自动调谐前暂时拆除这些配件。
(Xσ代表漏感抗,是定子漏感抗X11和转子漏感抗X21之和) (6)为了保证控制性能,必须按变频器标准适配电动机进行电动机配置,若电动机功率与标准适配电动机的功率差距过大(功率差别一般在1~2级之间),变频器的控制将明显下降,或者配用高转差电动机等特殊电动机也将大大影响使用效果。 (7)如果在变频器与电动机之间接有电抗器或滤波器等配件,将影响到自动调谐的准确度,应该在进行自动调谐前暂时拆除这些配件。







