

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介1 .控制原理 速度和转矩控制是张力收卷传动电动机的核心控制,其控制原理如图 6. 37 所示。 M1 为主传动,采用双闭环速度 / 转矩矢量控制方式,速度环为 V 速度给定和 PG 编码器返回
1.控制原理 速度和转矩控制是张力收卷传动电动机的核心控制,其控制原理如图6. 37所示。M1为主传动,采用双闭环速度/转矩矢量控制方式,速度环为V速度给定和PG编码器返回的实际速度的控制回路,其输出值再乘以一定的比值就是M2的转矩控制输入值。转矩环为内部闭环。M2为收卷传动,速度闭环的输出值并不直接控制转矩,而只限定M2转矩的幅度,以最终保证收卷电动机在线速度上的紧密性和同步性,M2转矩的输入值来自张力控制器输出的转矩值,以决定M2的转矩输出值。 2.硬件选型与设计 本次轧机电动机选用国产YVP系列变频电动机,选用强制风冷和OMRON差动式编码器E682-CWZIX。由于三菱变频器所选配电动机基本都是国产电动机,并非选用三菱电动机,因此,这里有必要将编码器的具体接线与原理解释清楚。 (1)编码器的具体指标。 ①分辨率:轴旋转1次时输出的增量信号脉冲数或绝对值的绝对位置数。 ②输出相:增量形式的输出信号数,包括1相型(A相)、2相型(A相、B相)、3相型(A相、B相、Z相)。Z相输出1次即输出1次原点用的信号。 ③输出相位差:轴旋转时,A相、B相各信号相互间上升或下降中的时间偏移量与信号1周期时间的比,或者用电气角表示信号1周期为360°。A相、B相用电气角表示为90°的相位差(如图6. 38所示)。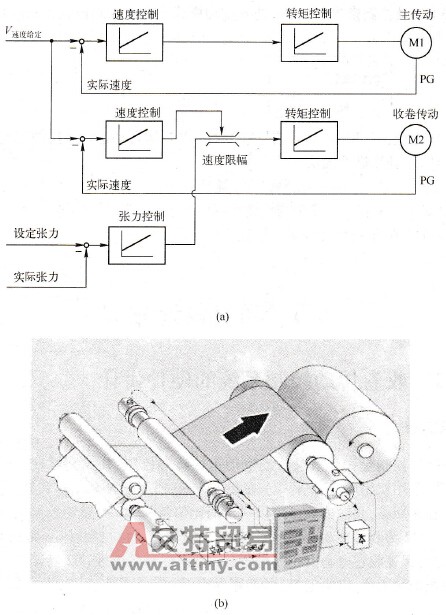 图6. 37 收卷张力控制原理
图6. 37 收卷张力控制原理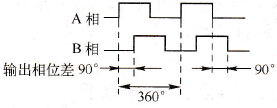 图6. 38 输出相位差 ④CW:顺时针旋转(Clock Wise)的方向。从轴侧面观察为向右旋转,在这个旋转方向中,通常增量型为A相比B相先进行相位输出,绝对型为代码增加方向。CW方向反旋转时为CCW( Counter Clock Wise)。 ⑤输出功效比:使轴以固定速旋转时输出的平均脉冲周期时间与1周期的H位时间的比。 ⑥最高响应频率:响应信号所得到的最大信号频率。 ⑦上升时间、下降时间:输出脉冲幅度的10%~90%的时间,如图6.39所示。
图6. 38 输出相位差 ④CW:顺时针旋转(Clock Wise)的方向。从轴侧面观察为向右旋转,在这个旋转方向中,通常增量型为A相比B相先进行相位输出,绝对型为代码增加方向。CW方向反旋转时为CCW( Counter Clock Wise)。 ⑤输出功效比:使轴以固定速旋转时输出的平均脉冲周期时间与1周期的H位时间的比。 ⑥最高响应频率:响应信号所得到的最大信号频率。 ⑦上升时间、下降时间:输出脉冲幅度的10%~90%的时间,如图6.39所示。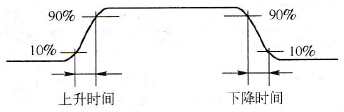 图6.39 上升时间、下降时间 ⑧输出电路。 ·开路集电极输出:以输出电路的晶体管发射极为共通型,以集电极为开放式的输出电路。 ·电压输出:以输出电路的晶体管的发射极为共通型,在集电极与电源间插入电阻,并输出因电压而变化的集电极的输出电路。 ·线路驱动器输出(又称差动输出):本输出方式采用高速、长距离输送用的专用IC方式,是依据RS422 -A规格的数据传送方式。信号以差动的2信号输出,因此抗干扰能力强。 ·补码输出:输出上具备NPN和PNP两种输出晶体管的输出电路。根据输出信号的[H]、[L],两个输出晶体管交互进行[ON]、[OFF]动作。使用时,请在正极电源、OV上进行上拉、下降后再使用。补码输出包括输出电流的流出、流人两个动作,其特征为信号的上、下降速度快,可延长代码的长距离。可与开路集电极输入机器(NPN、PNP)连接。 ⑨启动转矩:旋转式编码器的轴旋转启动时必须的旋转力矩。通常旋转时,一般取比本值低的值。轴为防水用密封设计时,启动转矩的值较高。 ⑩惯性力矩:表示旋转式编码器的旋转启动、停止时的惯性力的大小。 ⑪轴容许力:加在轴上的负载负重的容许量。径向以直角方向对轴增加负重,而轴向以轴方向增加负重。两者都为轴旋转时容许负重,该负重的大小会对轴承的寿命产生影响。 ⑫绝对代码。 ·二进制代码:本代码为纯二进制代码,用2n表示。 ·格雷码:转换位置时,只有1位发生变化的代码。旋转式编码器的代码为格雷码。 ·余格雷码:用格雷码表示36、360、720等2n以外的分辨率时的代码。格雷码的性质为:将格雷码的最上位从“0”切换至“1”时起,当数值小的一方和数值大的一方分别只取相同区域时,在该范围内从代码的结束与开始进行转换时,只改变1位信号。根据这种性质,可按格雷码进行任意的偶数分辨率设定。但此时,代码的起始不是从0位置开始,而是从中途的代码开始,所以实际使用时,需要进行代码转换处理,转换至由0位置起的代码后再使用。 ⑬中空轴型(空心轴型):旋转轴为中空轴形状,通过将驱动侧的轴直接与中空孔连接,可节省轴方向的空间。以板簧为缓冲,吸收驱动轴的振动等。 ⑭金属盘:编码器的旋转板(盘)是用金属制成的,与玻璃旋转板(盘)相比,更强化了耐冲击性。但受到狭缝加工的制约,不能应用于高分辨率。 (2)编码器E682-CWZlX接线与输出示意。图6.40所示为编码器E682-CWZlX接线原理图。
图6.39 上升时间、下降时间 ⑧输出电路。 ·开路集电极输出:以输出电路的晶体管发射极为共通型,以集电极为开放式的输出电路。 ·电压输出:以输出电路的晶体管的发射极为共通型,在集电极与电源间插入电阻,并输出因电压而变化的集电极的输出电路。 ·线路驱动器输出(又称差动输出):本输出方式采用高速、长距离输送用的专用IC方式,是依据RS422 -A规格的数据传送方式。信号以差动的2信号输出,因此抗干扰能力强。 ·补码输出:输出上具备NPN和PNP两种输出晶体管的输出电路。根据输出信号的[H]、[L],两个输出晶体管交互进行[ON]、[OFF]动作。使用时,请在正极电源、OV上进行上拉、下降后再使用。补码输出包括输出电流的流出、流人两个动作,其特征为信号的上、下降速度快,可延长代码的长距离。可与开路集电极输入机器(NPN、PNP)连接。 ⑨启动转矩:旋转式编码器的轴旋转启动时必须的旋转力矩。通常旋转时,一般取比本值低的值。轴为防水用密封设计时,启动转矩的值较高。 ⑩惯性力矩:表示旋转式编码器的旋转启动、停止时的惯性力的大小。 ⑪轴容许力:加在轴上的负载负重的容许量。径向以直角方向对轴增加负重,而轴向以轴方向增加负重。两者都为轴旋转时容许负重,该负重的大小会对轴承的寿命产生影响。 ⑫绝对代码。 ·二进制代码:本代码为纯二进制代码,用2n表示。 ·格雷码:转换位置时,只有1位发生变化的代码。旋转式编码器的代码为格雷码。 ·余格雷码:用格雷码表示36、360、720等2n以外的分辨率时的代码。格雷码的性质为:将格雷码的最上位从“0”切换至“1”时起,当数值小的一方和数值大的一方分别只取相同区域时,在该范围内从代码的结束与开始进行转换时,只改变1位信号。根据这种性质,可按格雷码进行任意的偶数分辨率设定。但此时,代码的起始不是从0位置开始,而是从中途的代码开始,所以实际使用时,需要进行代码转换处理,转换至由0位置起的代码后再使用。 ⑬中空轴型(空心轴型):旋转轴为中空轴形状,通过将驱动侧的轴直接与中空孔连接,可节省轴方向的空间。以板簧为缓冲,吸收驱动轴的振动等。 ⑭金属盘:编码器的旋转板(盘)是用金属制成的,与玻璃旋转板(盘)相比,更强化了耐冲击性。但受到狭缝加工的制约,不能应用于高分辨率。 (2)编码器E682-CWZlX接线与输出示意。图6.40所示为编码器E682-CWZlX接线原理图。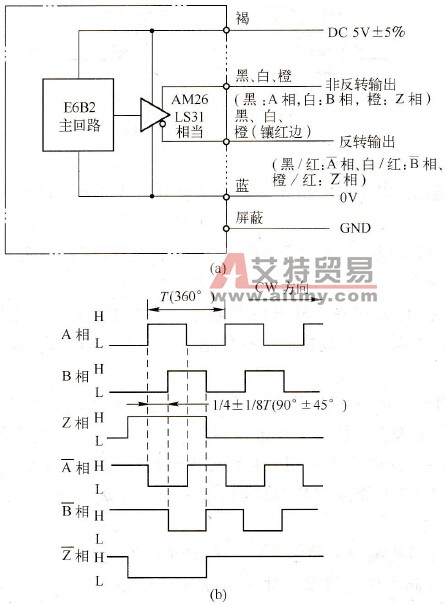 图6.40 编码器E682-CWZIX接线原理图 表6.6所示为编码器E682-CWZlX接线端子功能定义,它采用DC 5V电源,输出3对A、B、Z相差动信号。 表6.6 编码器E682-CWZ1X接线端子功能定义
图6.40 编码器E682-CWZIX接线原理图 表6.6所示为编码器E682-CWZlX接线端子功能定义,它采用DC 5V电源,输出3对A、B、Z相差动信号。 表6.6 编码器E682-CWZ1X接线端子功能定义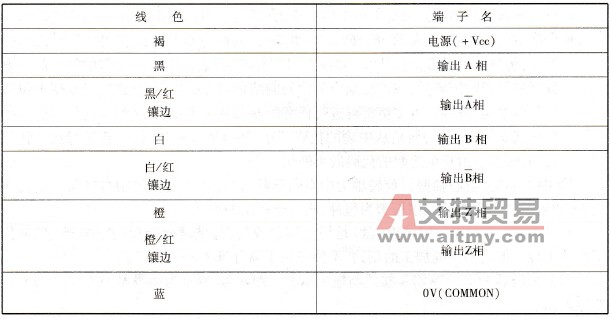 (3)收卷变频器硬件接线图。图6.41所示为收卷变频器硬件接线图。VF1主传动变频器的速度设定采用电位器,并连接了PLG差动输入信号作为闭环矢量控制的反馈信号,跳线设置如图6.41所示。VF2收卷变频器采用转矩控制,其转矩命令来自于张力控制器的输出,速度限幅来自于VF1的速度。
(3)收卷变频器硬件接线图。图6.41所示为收卷变频器硬件接线图。VF1主传动变频器的速度设定采用电位器,并连接了PLG差动输入信号作为闭环矢量控制的反馈信号,跳线设置如图6.41所示。VF2收卷变频器采用转矩控制,其转矩命令来自于张力控制器的输出,速度限幅来自于VF1的速度。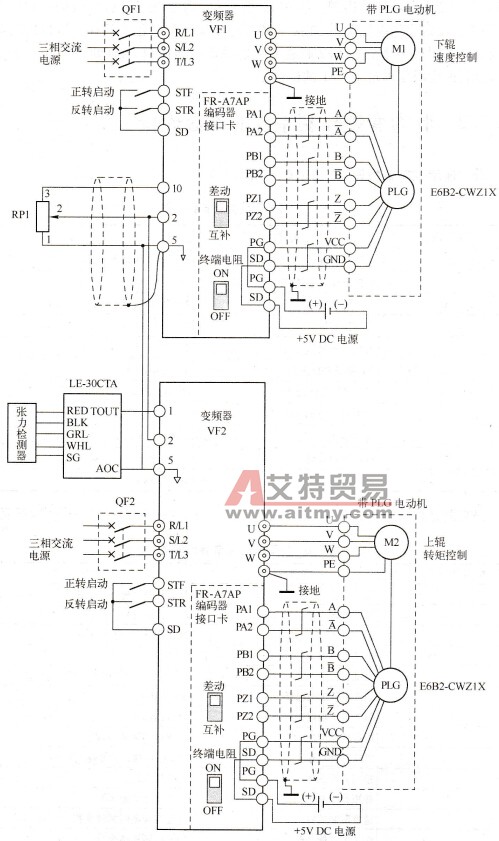 图6.41 收卷变频器硬件接线图
图6.41 收卷变频器硬件接线图







