![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介1 .异步电动机的自然机械特性 机械特性是说明拖动系统工作情况的重要特性。电动机的机械特性是说明电动机产生的电磁转矩 TM 和转速之间的关系,它体现了电动机的带负载能力。电
1.异步电动机的自然机械特性
机械特性是说明拖动系统工作情况的重要特性。电动机的机械特性是说明电动机产生的电磁转矩TM和转速之间的关系,它体现了电动机的带负载能力。电动机在没有人为地改变其参数时的机械特性,称为自然机械特性。
异步电动机的自然机械特性如图2-1所示,其主要特征可由三个点来描述:

图2-1 电动机的自然机械特性
(1)理想空载点。电动机输出轴上的转矩为0,称为理想空载。这时,电动机的转速可以达到同步转速(旋转磁场的转速)n0,见图中的A点。所以,理想空载点的坐标是
A(0,n0)
(2)起动点。电动机刚接通电源,但转速仍为0时称为起动点,这时的转矩称为起动转矩Ts,也叫堵转转矩,见图中的S点。因此,起动点的坐标是
S(Ts,0)
通常,异步电动机的起动转矩应大于额定转矩的1.5倍,即
Ts≥1.5TMN (2-1)
式中 Ts-起动转矩(N·m);
TMN-电动机的额定转矩(N·m)。
(3)临界点。异步电动机的机械特性有一个拐点K。在这一点,电动机所能产生的电磁转矩最大,称为临界转矩,用TK表示,K点称为临界点。与此对应的转速称为临界转速nK,相应地,有临界转差△nK和临界转差率sK。所以,临界点的坐标是
K( TK,nK)
临界转矩与额定转矩之比就是异步电动机的过载能力。通常,过载能力应≥2,即
TK≥2.0TMN (2-2)
式中 TK-临界转矩(N·m)。
2.机械特性说明的问题
(1)从电动机的角度看。如图2-2a所示,当转速较高,为n1时,转差△n1较小,转子绕组切割旋转磁场所产生的感应电动势和电流也较小。所以,电磁转矩TM1较小。
当转速下降为n2时,转差△n2增大,转子绕组的感应电动势和电流也增大。所产生的电磁转矩TM2较大。
所以,从电动机的角度看,转速下降,则电动机产生的电磁转矩增大:
n↓→TM↑
(2)从负载的角度看。如图2-2b所示,当负载较轻、阻转矩为TL1时,用于克服TL1所需要的电磁转矩较小,拖动系统的工作点为Q1点,转速较高,为n1。

图2-2 机械特性说明的问题
a)从电动机侧看b)从负载侧看
当负载的阻转矩增大为TL2时,用于克服TL2所需要的电磁转矩也增大,拖动系统的工作点移至Q2点,转速下降为n2。
所以,从负载的角度看,则当负载的阻转矩增大时,拖动系统的转速将下降:
TL↑→n↓
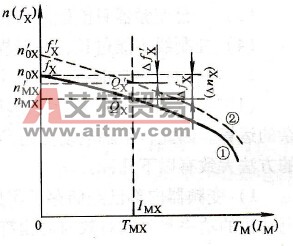
3.变频后的机械特性
在电压和频率成正比(Ku=Kf)的情况下,变频后电动机的机械特性如图2-3所示,主要特点是:
1)同步转速n0随频率的下降而下降。
2)临界转速nK也下降,但临界转差基本不变。
3)临界转矩TK随频率的下降而略有减小。
4)机械特性基本平行。