![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介由于某些原因,当 nn0 时,转子切割旋转磁场的方向和电动运行状态 nn0 正好相反,转子中感应电动势和电流的方向也相反,电磁转矩 T 也就和 n 反向,为制动转矩。回馈制动的实质是将
由于某些原因,当n>n0时,转子切割旋转磁场的方向和电动运行状态n<n0正好相反,转子中感应电动势和电流的方向也相反,电磁转矩T也就和n反向,为制动转矩。回馈制动的实质是将轴上的机械能转换成电能,回馈给电源。
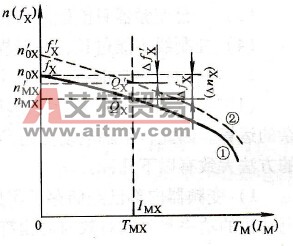
如图2-5所示,曲线①第一象限为电动机电动运行状态的机械特性曲线。下面分析两种不同的回馈制动情况。
1)起重机下放重物时,电动机处于回馈制动状态,曲线①第二象限为其机械特性曲线,制动的过程如下:由于重力作用,电动机转速n沿曲线①增加,当n>n0时,电磁转矩T为制动转矩,直到T=TB=TL,工作点由A点移至B点,重物以nB匀速下放。
2)变频调速时,由于f1降低使电动机处于回馈制动状态,曲线②第二象限为其机械特性曲线,制动的过程如下:f1降低瞬间,由于机械惯性,电动机转速n来不及变化,工作点由A点平跳至C点,于是得到制动转矩Tc,使电动机沿着曲线②减速。

图2-5 回馈制动的机械特性曲线