![]() 来源:艾特贸易2018-06-04
来源:艾特贸易2018-06-04
简介港口机械设备具有较长的发展历史,拖动系统采用过各种各样的方法。从早期的直流调速继电接触器控制系统,到近代的 AC 定子调压、 DC 晶闸管调速装置。电动机主要以绕线式异步机
港口机械设备具有较长的发展历史,拖动系统采用过各种各样的方法。从早期的直流调速继电接触器控制系统,到近代的AC定子调压、DC晶闸管调速装置。电动机主要以绕线式异步机和直流电机为主,其最大的缺点是滑差、整流子、碳刷的存在致使维修不便。进入20世纪80年代后,随着变频器的迅速发展,变频器进入港机设备的驱动领域,引起人们极大的重视。它克服了以往驱动系统的缺点,明显提高了可靠性的同时,还具有显著的节能效果。由于异步电动机结构简单、维修方便、适合在有粉尘和振动大的环境中使用,故异步电机变频调速系统非常适合在港口机械上推广应用。
一、港机设备的特点
1.1 使用环境
运行中的港机设备振动冲击大,空气中煤粉、炭粉、化学物质粉尘严重,海边特有的湿度、盐碱等腐蚀性成分高。在电源质量方面普遍存在变压器容量小、动力电缆线路长、截面小,在大型设备启动工作时,经常造成瞬时欠电压。电压波动范围为320~400V。
1.2 运行特点
港机设备具有以下运行特点:
①启动转矩大,通常超过150%以上,若考虑提升时电压降低及超载试验的要求,至少应在启动加速过程中提供200%转矩。
②由于港机一般设有机械制动装置,为使电机转矩与机械制动转矩进行平滑切换,必须充分考虑电机切入与制动器的动作时序。
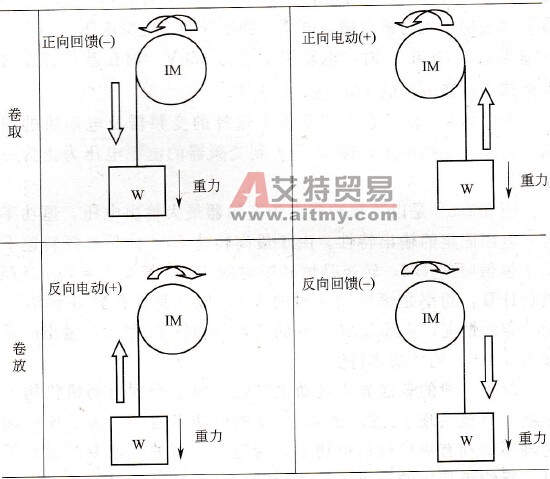
③当提升或下降时,重物产生的位势负载使电机处于发电状态,能量要向电源侧回馈。由于大多数通用变频器没有电能回馈能力,此时必须通过制动单元,将这部分能量经制动电阻以热能形式释放掉。
④提升机构在抓吊重物离开或接触地面的瞬间负载变化激烈,变频器必须能适应这种冲击负载并对其进行平滑控制。
1.3 采用变频器的必要性
①就门式起重机而言,目前大多采用绕线式异步电动机转子串电阻的有级调速方案,但启动电流大,设备受冲击严重,经常造成机械构件的损伤,严重影响设备使用寿命和正常生产。
②港机也有选用直流调压调速方案,虽然可以平滑无级调速及软启动;但由于直流电机存在维护工作量大、电机成本高、体积大等缺点,不如经久耐用的交流电机。
③变频器具有显著的节能效果。
④变频器具有完善的保护及自诊断功能,和PLC控制结合可提高系统的可靠性。
二、港机设备中变频器的选型
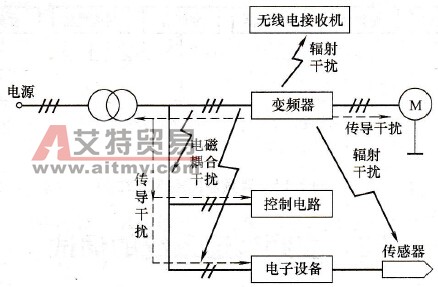
图12-2为变频器在港机上应用的原理框图。对不同设备选用适宜的变频器,对提高系统可靠性十分重要。目前,变频器有以下两种控制方式:
(1) U/f控制
U/f控制方式是根据负载特性选择合适的U-F曲线进行控制。为了在低频区增大电机转矩、变频器设有转矩补偿功能。
如图12-3所示,变频器在线实时计算转矩,能在整个输出频率范围内根据负载大小自动调整U/f的比例,以满足负载特性要求。
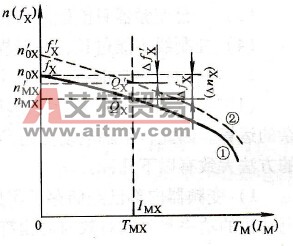
此外,在电机加速过程中,如果负载转矩过大,超过电机峰值所决定的转矩值,则电机将无法跟踪变频器的输出频率,形成失速状态,这在港机作业中是不允许的。为防止失速,当加速时电流峰值超过预先设置的保护值,可通过自动减缓加速特性斜率,以保证电机转速始终能跟踪变频器输出频率的变化,这就是变频器的失速防止功能。图12-4为防止失速示意图。

图12-2 变频器在港机上应用的原理框图

图12-3 转矩补偿

图12-4 防止失速
(2)矢量控制
矢量控制根据直流电机的基本控制原理,使异步电机和磁通矢量和电流矢量相互垂直,可以产生与直流电机相同的转矩及控制精度、响应速度:由于矢量控制方式能实现转矩控制,因此对于港口装卸设备这类恒转矩负载最为合适。
三、变频器及其周边设备的容量设计
3.1 计算容量前应考虑的因素
(1)负载特性
①负载类型重力、摩擦、惯性、流体。
②负载性质恒转矩、恒功率。
③负载变化恒定、冲击、高启动。
(2)运行方式
①连续运行。
②中、低速长时间运行。
③短时间运行。
(3)电源质量
①电源变压器容量大小。
②电压波动大小。
③频率、相数。
(4)负载的最高输出功率和转速
3.2 电机功率计算
对于提升及变幅机构所需电机功率为
式中,W为负荷重量,kg;v为额定速度,m/min;η为机械效率。
行走及旋转机构计算公式与上相同,但需考虑风力造成的阻力,故
式中,μ为风阻系数。
启动加速转矩T为
式中,GD²为转动惯量,kg·m²;n为电机额定转速,r/min;tmin为加速的最短时间,s。
3.3 变频器容量的计算
计算变频器容量P0(单位kVA)时,应考虑如下三个原则:
(1)变频器容量必须满足负载功率的要求,即

(2)变频器容量应大于电机容量,即

(3)变频器电流Ii应大于电机额定电流,即
Ii≥K·IN
3.4 制动电阻的计算
当电机转速高于变频器频率所对应的同步转速时,处于发电状态的电动机将把负载惯性产生的动能反馈到变频器中。必须将这部分能量通过制动单元,由外接的制动电阻释放掉。图12-5为制动回路原理图。

图12-5 制动回路原理图
(1)制动转矩TB的计算

式中,GDM²为电动机转动惯量,kg·m²;GDL²为负载转动惯量,kg·m²;n1为减速初始速度,r)min;n2为减速结束速度,r/min;TL为负载转矩,kg·m。
(2)制动电阻RB的计算
由图12-5可知,制动电流峰值由制动单元中的晶体管允许电流Ic决定,即制动电阻的最小值

制动电阻所需功率PB计算如下:

式中,TB为电动机额定转矩,kg·m;0.2TN表示不加制动转矩,依靠电机内部消耗亦可获得大约20%的制动转矩,故在计算公式中要扣除0.2TN。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)