![]() 来源:艾特贸易2017-12-20
来源:艾特贸易2017-12-20
简介(1) 微分的几何意义与近似计算 在误差曲线 ev(t) 上作一条切线(见图 10-11 ),该切线与 x 轴正方向的夹角α的正切值 tg α即为该点处误差的微分 dev(t)/dt 。 PID 控制器输出表达式 (10-1) 中
(1)微分的几何意义与近似计算
在误差曲线ev(t)上作一条切线(见图10-11),该切线与x轴正方向的夹角α的正切值tgα即为该点处误差的微分dev(t)/dt。PID控制器输出表达式(10-1)中的微分用下式来近似:

式中,ev(n-1)(见图10-11)是第n-1次采样时的误差值。将积分和微分的近似表达式代入式(10-1),第n次采样时控制器的输出为
 (10-2)
(10-2)
在FB 41“CONT_C”(连续控制器)中,Kp、TI、TD和M分别对应于输入参数GAIN、TI、TD和积分初始值UTLVAL。
(2)误差微分的物理意义
误差的微分就是误差的变化速率,误差变化越快,其微分的绝对值越大。微分的符号反映了误差变化的方向。在图10-12中的A点和B点之间、C点和D点之间,误差不断减小,其微分为负;在B点和C点之间,误差不断增大,其微分为正。控制器输出量的微分部分与误差的微分成正比,反映了被控量变化的趋势。

图10-11 微分的近似计算

图10-12 PID控制器输出中的微分分量
有经验的操作人员在温度上升过快,但是尚未达到设定值时,根据温度变化的趋势,预感到温度将会超过设定值,出现超调。于是调节电位器的转角,提前减小加热的电流。这相当于士兵射击远方的移动目标时,考虑到子弹运动的时间,需要一定的提前量一样。
在图10-12中启动过程的上升阶段(A点到E点),被控量尚未超过其稳态值,超调还没有出现。但是因为被控量不断增大,误差e(t)不断减小,控制器输出量的微分分量为负,使控制器的输出量减小,相当于减小了温度控制系统加热的功率,提前给出了制动作用,以阻止温度上升过快.所以可以减少超调量。因此微分控制具有超前和预测的特性,在温度尚未超过稳态值之前,微分作用就能提前采取措施,以减小超调量。在图10-12的E点和B点之间,被控量继续增大,控制器输出量的微分分量仍然为负,继续起制动作用,以减小超调量。
闭环控制系统的振荡甚至不稳定的根本原因在于有较大的滞后因素,微分控制的超前作用可以抵消滞后因素的影响。适当的微分控制作用可以使超调量减小,调节时间缩短,增加系统的稳定性。对于有较大惯性或滞后的被控对象,控制器输出量变化后,要经过较长的时间才能引起反馈值的变化。如果PI控制器的控制效果不理想,可以考虑在控制器中增加微分作用,以改善闭环系统的动态特性。作者在使用PI控制器调试某转速控制系统时,不管怎样调节参数,超调量老是压不下去。增加微分控制作用后,超调量马上就降到了期望的范围。
(3)微分部分的调试
微分时间TD与微分作用的强弱成正比,TD越大,微分作用越强。但是TD太大,将导致微分部分剧烈变化,可能会使响应曲线变得很怪异,甚至出现“毛刺”(见图10-13),或使被控量接近稳态值时变化缓慢。后一现象的原因是因为接近稳态值时,误差很小,比例部分消除误差的能力很弱。因为微分作用太强,抑制了被控量的上升,导致被控量上升极为缓慢,到达稳态的时间过长。此外微分部分过强会使系统抑制干扰噪声的能力降低。综上所述,微分控制作用的强度应适当,太弱则作用不大,过强则有负面作用。如果将微分时间设置为0,微分部分将不起作用。

图10-13 PID控制阶跃响应曲线
(4)不完全微分PID
微分作用的引入可以改善系统的动态性能,其缺点是对干扰噪声敏感,使系统抑制干扰的能力降低。为此在微分部分增加一阶惯性滤波环节,以平缓PID控制器输出中微分部分的剧烈变化。这种PID称为不完全微分PID。
设惯性滤波环节的时间常数为Tf,不完全微分PID的传递函数为
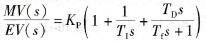 (10-3)
(10-3)
在FB 41中,Tf对应于微分操作的延迟时间TM_LAG。SFB 41的帮助文件建议将TM_LAG设置为微分时间TD的1/5,这样可以减少一个需要整定的参数。
(部分原创文章应编辑稿费需求,每篇需要收取2元的稿费,如需查看全文请联系客服索取,谢谢理解!在线客服: )
)

 PLC编程的基本规则
PLC编程的基本规则