![]() 来源:艾特贸易2017-12-28
来源:艾特贸易2017-12-28
简介首先打开项目“ PID 控制”,然后打开 PLCSIM 。将所有的块下载到仿真 PLC ,将仿真 PLC 切换到 RUN-P 模式。 点击 Windows 的“开始”按钮,执行菜单命令“开始”→“所有程序”→“ SIMA
首先打开项目“PID控制”,然后打开PLCSIM。将所有的块下载到仿真PLC,将仿真PLC切换到RUN-P模式。
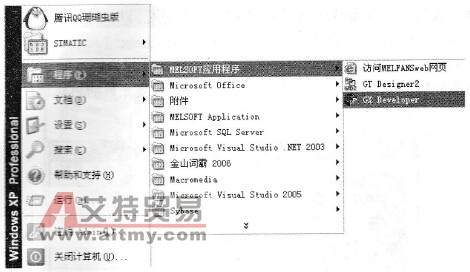
点击Windows的“开始”按钮,执行菜单命令“开始”→“所有程序”→“SIMATIC”→“STEP 7”→“PID控制参数赋值”,打开PID控制视图(见图10-19)。点击工具栏上的 按钮,用单选框选中“打开”对话框中的“在线”。点击“浏览”按钮,打开已下载到仿真PLC的项目“PID控制”,选中该项目中FB 41的背景数据块DB 41。
按钮,用单选框选中“打开”对话框中的“在线”。点击“浏览”按钮,打开已下载到仿真PLC的项目“PID控制”,选中该项目中FB 41的背景数据块DB 41。

图10-19 PID控制参数赋值工具
点击“确定”按钮,出现如图10-20所示的参数赋值对话框,显示的PID控制器的参数是在程序中设置的。可以在程序运行时用这个对话框来修改PID控制器的参数。

图10-20 PID控制参数赋值对话框
点击工具栏上的曲线记录 按钮,打开曲线记录对话框(见图10-21),此时还没有图中的曲线。
按钮,打开曲线记录对话框(见图10-21),此时还没有图中的曲线。

图10-21 曲线记录对话框
点击“设置”按钮,打开“设置”对话框(见图10-22)。将曲线3由“操纵变量”(PID控制器的输出变量)改为“无”,只显示额定值(即给定值)和实际值(即被控量)的曲线。可以用“改变颜色”按钮设置各曲线的颜色,用“Y轴限制”下面的文本框修改各曲线显示的上限值和下限值,用“时间轴长度”文本框修改曲线的时间轴长度。点击“确定”按钮返回监控曲线界面。
可以用图10-21右边的单选框设置Y轴显示哪一条曲线的坐标值。点击“开始”按钮,开始显示设置的变量的曲线。图中的方波是给定值(即额定值)曲线,由于OB1中程序的作用。给定值在20%~70%之间阶跃变化,深色曲线是被控量(即实际值)曲线。点击“停止”按钮,停止动态刷新实时曲线。图中的K,等文字是作者添加的。

图10-22 曲线记录参数设置对话框
图10-23中的被控量曲线与图10-21中的相同,对应的控制器参数(初始值)见图10-20。该曲线的超调量过大,有多次震荡。将图10-20中的积分时间改为4s,点击工具栏上的下载按钮 ,将修改后的参数下载到仿真PLC。与图10-23中积分时间为2s的曲线相比,增大积分时间(减弱积分作用)后,图10-24中被控量曲线的超调量和震荡次数明显减小。
,将修改后的参数下载到仿真PLC。与图10-23中积分时间为2s的曲线相比,增大积分时间(减弱积分作用)后,图10-24中被控量曲线的超调量和震荡次数明显减小。

图10-23 PID控制阶跃响应曲线

图10-24 PID控制阶跃响应曲线
将图10-20中的积分时间还原为2s,微分时间由0.8s增大为2s。与图10-23中的曲线相比,适当增大微分时间后,图10-25中响应曲线的超调量和震荡次数明显减小。
将图10-20中的积分时间改为8s,微分时间为2s。与图10-23中的曲线相比(积分时间为2s,微分时间为0.8s),增大积分时间和适当增大微分时间后,图10-26中响应曲线的超调量几乎为0,但是付出的代价是第一次上升到稳态值的时间较长。

图10-25 PID控制阶跃响应曲线

图10-26 PID控制阶跃响应曲线
图10-27和图10-28的微分时间均为0(即采用PI调节),积分时间均为8s。图10-28的比例系数为1.0,与图10-27相比(比例系数为2.0),同时减弱了比例作用和积分作用。可以看出,减小比例系数能显著降低超调量。

图10-27 PI控制阶跃响应曲线

图10-28 PI控制阶跃响应曲线
读者可以修改OB100中FB 100(被控对象)的参数,下载到仿真PLC后,调整PID控制器的参数,直到得到较好的响应曲线,即超调量较小,过渡过程时间较短。
在硬件组态中修改OB35的循环周期,同时修改FB41、FB 100中的采样周期,使之与OB35的循环周期相同,可以了解采样周期与控制效果之间的关系。通过仿真实验,可以较快地掌握PID参数的整定方法。
(部分原创文章应编辑稿费需求,每篇需要收取2元的稿费,如需查看全文请联系客服索取,谢谢理解!在线客服: )
)

 PLC编程的基本规则
PLC编程的基本规则