

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介变频调速闭环控制系统的稳定性条件与一般闭环控制系统的稳定性条件相同。 (1) 闭环控制系统稳定性的必要条件 闭环控制系统稳定性的必要条件是闭环控制系统是负反馈控制系统。
变频调速闭环控制系统的稳定性条件与一般闭环控制系统的稳定性条件相同。 (1)闭环控制系统稳定性的必要条件 闭环控制系统稳定性的必要条件是闭环控制系统是负反馈控制系统。 ①环节增益。如图2-77所示闭环控制系统,它由控制器、执行器、被控对象和检测变送环节等组成。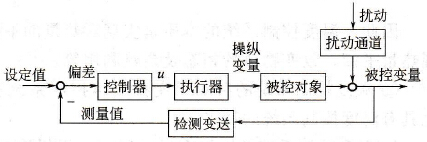 图2-77 简单闭环控制系统框图 a.环节的增益。稳态条件下,某一环节的输出增量与输入增量之比称为该环节的增益。当输入信号增加时,输出信号也增加,则该环节的增益为正,反之,当输入信号增加时,输出信号减小,则该环节的增益为负。 例如,变频器输入信号是控制器的输出电流,变频器的输出信号是频率信号。当电流增加时,频率也增加,因此,变频器的增益为正。 换热器被控对象中,如果输入的操纵变量是冷流体流量,被控变量是温度,它作为被控对象的输出变量。因此,当冷流体流量增加时,换热器出口温度下降,因此,对该换热器被控对象,其增益为负。 b.控制器的增益。控制器的输入信号是偏差e,它等于设定值SP减测量值PV,在变频调速控制系统中,因为测量信号是反馈回路的输出信号,因此,测量信号也称为反馈信号。变频调速控制系统中,控制器的输出信号u送变频器。控制器的比例控制算法如下: u=K(SP-PV)=Ke (2-72) 式中,K是控制器增益;e是控制器偏差,u是控制器输出,SP是控制器设定值,PV是控制器反馈值。根据定义,当控制器偏差e增加时,如果控制器输出u增加,则增益K为正。反之,控制器偏差e增加时,如果控制器输出u减小,则增益K为负。 c.控制器的正、反作用。为确定控制器增益的正和负值,通常定义控制器的正、反作用。当控制器的测量(反馈)增加时,控制器的输出增加,称该控制器为正作用控制器。反之,如果控制器的测量(反馈)增加时,控制器的输出减小,称该控制器为反作用控制器。 根据式(2-71),正作用控制器的测量(反馈)信号增加,表示PV增加,则偏差e减小,其输出增加,因此,增益为负。即正作用控制器的增益为负。同样,反作用控制器的增益为正。 ②负反馈控制系统 a.负反馈。反馈信号使净输入信号减弱的控制系统称为负反馈控制系统。反馈信号使净输入信号增强的控制系统称为正反馈控制系统。 组成闭环的控制系统中各环节增益之积为正,则该控制系统是负反馈控制系统。乘积为负,则该控制系统是正反馈控制系统。 如图2-78所示闭环控制系统,其前向通道各环节的增益分别为Kc,KA和KP,反馈通道的增益为KM,该控制系统的偏差信号e如果增加,因KcKAKPKM>0,因此,反馈信号PV=KcKAKPKMe增加,它使偏差e=SP-PV减小,即它是负反馈控制系统。因此,组成闭环控制系统成为负反馈的条件是其总开环增益(或开环放大倍数)为正。
图2-77 简单闭环控制系统框图 a.环节的增益。稳态条件下,某一环节的输出增量与输入增量之比称为该环节的增益。当输入信号增加时,输出信号也增加,则该环节的增益为正,反之,当输入信号增加时,输出信号减小,则该环节的增益为负。 例如,变频器输入信号是控制器的输出电流,变频器的输出信号是频率信号。当电流增加时,频率也增加,因此,变频器的增益为正。 换热器被控对象中,如果输入的操纵变量是冷流体流量,被控变量是温度,它作为被控对象的输出变量。因此,当冷流体流量增加时,换热器出口温度下降,因此,对该换热器被控对象,其增益为负。 b.控制器的增益。控制器的输入信号是偏差e,它等于设定值SP减测量值PV,在变频调速控制系统中,因为测量信号是反馈回路的输出信号,因此,测量信号也称为反馈信号。变频调速控制系统中,控制器的输出信号u送变频器。控制器的比例控制算法如下: u=K(SP-PV)=Ke (2-72) 式中,K是控制器增益;e是控制器偏差,u是控制器输出,SP是控制器设定值,PV是控制器反馈值。根据定义,当控制器偏差e增加时,如果控制器输出u增加,则增益K为正。反之,控制器偏差e增加时,如果控制器输出u减小,则增益K为负。 c.控制器的正、反作用。为确定控制器增益的正和负值,通常定义控制器的正、反作用。当控制器的测量(反馈)增加时,控制器的输出增加,称该控制器为正作用控制器。反之,如果控制器的测量(反馈)增加时,控制器的输出减小,称该控制器为反作用控制器。 根据式(2-71),正作用控制器的测量(反馈)信号增加,表示PV增加,则偏差e减小,其输出增加,因此,增益为负。即正作用控制器的增益为负。同样,反作用控制器的增益为正。 ②负反馈控制系统 a.负反馈。反馈信号使净输入信号减弱的控制系统称为负反馈控制系统。反馈信号使净输入信号增强的控制系统称为正反馈控制系统。 组成闭环的控制系统中各环节增益之积为正,则该控制系统是负反馈控制系统。乘积为负,则该控制系统是正反馈控制系统。 如图2-78所示闭环控制系统,其前向通道各环节的增益分别为Kc,KA和KP,反馈通道的增益为KM,该控制系统的偏差信号e如果增加,因KcKAKPKM>0,因此,反馈信号PV=KcKAKPKMe增加,它使偏差e=SP-PV减小,即它是负反馈控制系统。因此,组成闭环控制系统成为负反馈的条件是其总开环增益(或开环放大倍数)为正。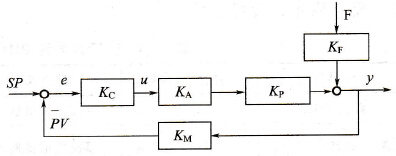 图2-78 负反馈控制系统 闭环控制系统稳定运行的必要条件是该闭环控制系统是负反馈控制系统,即总开环增益为正。 b.控制器正、反作用的选择。当闭环控制系统确定后,被控对象、检测变送环节和执行器的增益就可确定,因此,可通过选择控制器的增益使闭环控制系统成为负反馈控制系统,使闭环控制系统稳定。 闭环控制系统中,选择控制器正、反作用的步骤如下。 i.确定被控对象的增益。根据操纵变量增加时,如果被控变量增加,增益为正,被控变量减小,增益为负来确定被控对象的增益。 ii.确定检测变送环节的增益。根据被控变量增加,如果测量值(变频调速系统称为反馈信号)增加,则增益为正,反之,测量值减小,增益为负来确定检测变送环节的增益。 iii.确定执行器的增益。根据控制器输出增加,如果执行器输出增加,则增益为正,反之,如果执行器输出减小,则增益为负来确定执行器的增益。 iv.确定控制器的正、反作用。将上述三个环节的增益相乘,正与正相乘或负与负相乘,其结果为正,反之,正与负相乘,其结果为负。如果三个环节的总乘积为正,则选反作用控制器,如果总乘积为负,则选正作用控制器。 【例1】某水泵供水变频调速控制系统,被控变量是水泵出口水压,确定控制器正、反作用。 被控对象的输入变量是泵电机转速,输出变量是水压,当转速增加时,水压升高,因此,被控对象的增益为正。检测变送环节的输入变量是水压,测量值(送变频器的反馈)信号是经变送环节后的标准电流信号。当水压升高时,变送器输出的电流增加,因此,检测变送环节的增益为正。执行器是变频器,变频器输入信号是控制器输出,输出信号是电动机转速,当控制器输出增加时,转速增加,因此,变频器增益为正。根据上述分析,该闭环控制系统的上述三个环节增益乘积是正,为此,选用反作用控制器。 【例2】 某放卷系统的变频调速控制系统,被控变量是张力,确定控制器正、反作用。 该被控对象是放卷物料的张力。输入变量是电动机转速,输出变量是张力。当电动机转速增加时,张力减小,因此,被控对象增益为负。检测变送环节的输入变量是张力,测量值(送变频器的反馈)信号是经变送环节后的标准电流信号。当张力增加时,变送器输出的电流增加,因此,检测变送环节的增益为正。执行器是变频器,变频器输入信号是控制器输出,输出信号是电动机转速,当控制器输出增加时,转速增加,因此.变频器增益为正。根据上述分析,该闭环控制系统的上述三个环节增益乘积是负,为此,选用正作用控制器。 需注意,放卷电动机和收卷电动机的转速对张力的影响是不同的,即被控对象的增益不同。对收卷电动机,转速增加,张力增加,这时,被控对象的增益为正。 c.控制器正、反作用的实现。变频器内置的PID控制器有正、反作用的选择参数。需注意,不同变频器制造商对正、反作用的设置参数定义不同,应根据产品说明书确定。部分变频器只提供反作用控制方式。部分变频器按控制器偏差的正负确定控制器的正、反作用。一般设置为反作用,如果是正作用,则可设置为倒置。表2-63是部分变频器的PID控制器正、反作用参数设置表。 表2-63 变频器内置PID控制器正、反作用设置
图2-78 负反馈控制系统 闭环控制系统稳定运行的必要条件是该闭环控制系统是负反馈控制系统,即总开环增益为正。 b.控制器正、反作用的选择。当闭环控制系统确定后,被控对象、检测变送环节和执行器的增益就可确定,因此,可通过选择控制器的增益使闭环控制系统成为负反馈控制系统,使闭环控制系统稳定。 闭环控制系统中,选择控制器正、反作用的步骤如下。 i.确定被控对象的增益。根据操纵变量增加时,如果被控变量增加,增益为正,被控变量减小,增益为负来确定被控对象的增益。 ii.确定检测变送环节的增益。根据被控变量增加,如果测量值(变频调速系统称为反馈信号)增加,则增益为正,反之,测量值减小,增益为负来确定检测变送环节的增益。 iii.确定执行器的增益。根据控制器输出增加,如果执行器输出增加,则增益为正,反之,如果执行器输出减小,则增益为负来确定执行器的增益。 iv.确定控制器的正、反作用。将上述三个环节的增益相乘,正与正相乘或负与负相乘,其结果为正,反之,正与负相乘,其结果为负。如果三个环节的总乘积为正,则选反作用控制器,如果总乘积为负,则选正作用控制器。 【例1】某水泵供水变频调速控制系统,被控变量是水泵出口水压,确定控制器正、反作用。 被控对象的输入变量是泵电机转速,输出变量是水压,当转速增加时,水压升高,因此,被控对象的增益为正。检测变送环节的输入变量是水压,测量值(送变频器的反馈)信号是经变送环节后的标准电流信号。当水压升高时,变送器输出的电流增加,因此,检测变送环节的增益为正。执行器是变频器,变频器输入信号是控制器输出,输出信号是电动机转速,当控制器输出增加时,转速增加,因此,变频器增益为正。根据上述分析,该闭环控制系统的上述三个环节增益乘积是正,为此,选用反作用控制器。 【例2】 某放卷系统的变频调速控制系统,被控变量是张力,确定控制器正、反作用。 该被控对象是放卷物料的张力。输入变量是电动机转速,输出变量是张力。当电动机转速增加时,张力减小,因此,被控对象增益为负。检测变送环节的输入变量是张力,测量值(送变频器的反馈)信号是经变送环节后的标准电流信号。当张力增加时,变送器输出的电流增加,因此,检测变送环节的增益为正。执行器是变频器,变频器输入信号是控制器输出,输出信号是电动机转速,当控制器输出增加时,转速增加,因此.变频器增益为正。根据上述分析,该闭环控制系统的上述三个环节增益乘积是负,为此,选用正作用控制器。 需注意,放卷电动机和收卷电动机的转速对张力的影响是不同的,即被控对象的增益不同。对收卷电动机,转速增加,张力增加,这时,被控对象的增益为正。 c.控制器正、反作用的实现。变频器内置的PID控制器有正、反作用的选择参数。需注意,不同变频器制造商对正、反作用的设置参数定义不同,应根据产品说明书确定。部分变频器只提供反作用控制方式。部分变频器按控制器偏差的正负确定控制器的正、反作用。一般设置为反作用,如果是正作用,则可设置为倒置。表2-63是部分变频器的PID控制器正、反作用参数设置表。 表2-63 变频器内置PID控制器正、反作用设置 实际应用时,变频器出厂时系统的设置通常为反作用,即增益为正。因此,一般只需要分析被控对象增益的正、负来确定控制器的正、反作用。当被控对象的输入变量,即转速增加时,被控变量增加,则选反作用控制器,即保持出厂的设置。反之,如果,被控变量减小,则选正作用控制器,即将系统设置值更改即可。 曾发现一些早期变频器的PID控制器软件不能设置正作用控制方式,这时,可将原反馈信号连接到外部设定,将原外部设定连接到反馈端。 (2)闭环控制系统稳定性的充分条件 从静态稳定性看,闭环控制系统稳定性的充分条件是其开环总增益保持恒定。从动态稳定性看,闭环控制系统稳定性的充分条件是其总开环传递函数的模保持恒定。即 闭环控制系统静态稳定性条件:KcKAKPKM=常数 闭环控制系统动态稳定性条件:|Gc(s)GA(s)GP(s)GM(s)|=常数 ①采用控制阀时闭环控制系统稳定性充分条件的实现。采用控制阀作为执行器的闭环控制系统中,为实现闭环控制系统的静态稳定性,通常采用选择控制阀流量特性的方法来补偿被控对象的非线性特性,使总开环增益保持恒定。例如,被控变量是换热器出口温度时,由于被控对象具有非线性饱和特性,因此,为实现闭环控制系统的静态稳定性,通常选用等百分比流量特性的控制阀。 从动态考虑选择控制阀工作特性时,应在工作频率下总开环幅频特性和相频特性保持基本恒定,尤其是幅值比保持基本恒定。选择合适的控制阀工作流量特性可在一定程度上补偿由于被控对象幅频和相频特性非线性造成的系统不稳定。 ②采用非线性控制器控制规律实现闭环控制系统稳定性条件。变频器输入电流与其输出频率之间是线性关系,为实现变频调速闭环控制系统的稳定性条件,常用的方法是设计合适的非线性控制器控制规律,用于补偿因被控对象的非线性造成的系统不稳定。例如,换热器出口温度的变频调速控制系统中,可采用非线性控制规律实现非线性补偿。 ③选用变频器的非线性输入输出关系实现非线性补偿。从总开环增益的组成可以看到,执行器的非线性特性也可补偿总开环增益的非线性。例如,二次方负载的转矩与转速之间具有非线性关系,可利用非线性的输入输出关系实现非线性补偿等。
实际应用时,变频器出厂时系统的设置通常为反作用,即增益为正。因此,一般只需要分析被控对象增益的正、负来确定控制器的正、反作用。当被控对象的输入变量,即转速增加时,被控变量增加,则选反作用控制器,即保持出厂的设置。反之,如果,被控变量减小,则选正作用控制器,即将系统设置值更改即可。 曾发现一些早期变频器的PID控制器软件不能设置正作用控制方式,这时,可将原反馈信号连接到外部设定,将原外部设定连接到反馈端。 (2)闭环控制系统稳定性的充分条件 从静态稳定性看,闭环控制系统稳定性的充分条件是其开环总增益保持恒定。从动态稳定性看,闭环控制系统稳定性的充分条件是其总开环传递函数的模保持恒定。即 闭环控制系统静态稳定性条件:KcKAKPKM=常数 闭环控制系统动态稳定性条件:|Gc(s)GA(s)GP(s)GM(s)|=常数 ①采用控制阀时闭环控制系统稳定性充分条件的实现。采用控制阀作为执行器的闭环控制系统中,为实现闭环控制系统的静态稳定性,通常采用选择控制阀流量特性的方法来补偿被控对象的非线性特性,使总开环增益保持恒定。例如,被控变量是换热器出口温度时,由于被控对象具有非线性饱和特性,因此,为实现闭环控制系统的静态稳定性,通常选用等百分比流量特性的控制阀。 从动态考虑选择控制阀工作特性时,应在工作频率下总开环幅频特性和相频特性保持基本恒定,尤其是幅值比保持基本恒定。选择合适的控制阀工作流量特性可在一定程度上补偿由于被控对象幅频和相频特性非线性造成的系统不稳定。 ②采用非线性控制器控制规律实现闭环控制系统稳定性条件。变频器输入电流与其输出频率之间是线性关系,为实现变频调速闭环控制系统的稳定性条件,常用的方法是设计合适的非线性控制器控制规律,用于补偿因被控对象的非线性造成的系统不稳定。例如,换热器出口温度的变频调速控制系统中,可采用非线性控制规律实现非线性补偿。 ③选用变频器的非线性输入输出关系实现非线性补偿。从总开环增益的组成可以看到,执行器的非线性特性也可补偿总开环增益的非线性。例如,二次方负载的转矩与转速之间具有非线性关系,可利用非线性的输入输出关系实现非线性补偿等。







