

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介电动机 Y- △起动的 PLC 控制程序我们可以根据其继电器一接触器控制线路来转换。通过元件代号替换、符号图形替换、触点动合/动断修改、按编程规则整理,可以很容易地得到其梯形
电动机Y-△起动的PLC控制程序我们可以根据其继电器一接触器控制线路来转换。通过元件代号替换、符号图形替换、触点动合/动断修改、按编程规则整理,可以很容易地得到其梯形图,转换过程如图2-25所示。梯形图见光盘“实例2-3”中“星三角.PMW”。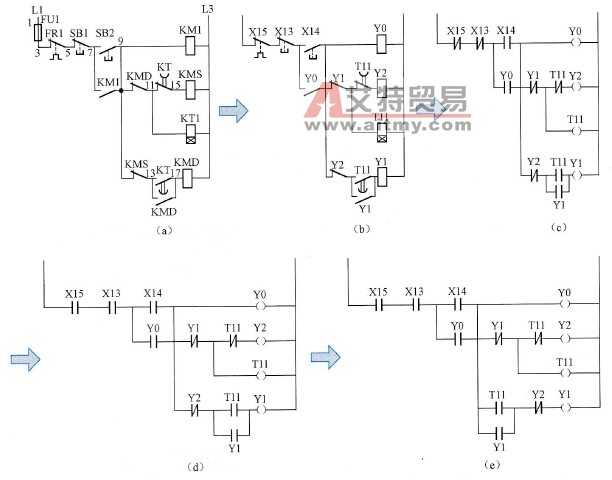
图2-25 Y-△起动PLC控制程序转换过程
(a)继电器控制图;(b)代号替换;(c)符号替换;(d)触点修改;(e)按规则整理
在正常情况下图中热继电器FR1未动作、停止按钮SB1未按下,其输入点X15和X13的动断触点有效。当按下起动按钮时,输入点X14的动合触点闭合,输出继电器Y0吸合并由动合触点自保,使外接继电器KJ1吸合一接触器KM1吸合;由于输出继电器Y1未动作,时间继电器T11线圈得电开始计时。时间继电器T11开始计时还未动作,故输出继电器Y2也吸合,使外接继电器KJ3吸合一接触器KMS吸合;此时电动机的线圈连接成星形起动。当时间继电器T11计时到达设定值(8s)时,T11动作。其动断触点断开,使输出继电器Y2释放,即接触器KMS释放;时间继电器T11动合触点闭合,使输出继电器Y1吸合并自保,使外接继电器KJ2吸合→接触器KMD吸合。此时电动机的线圈连接成三角形,进入正常运转状态。
电动机起动过程的梯形图监控情况如图2-26所示。
我们对图2-26所示梯形图作点修改,增加一个辅助继电器M1,将两个相串联的(相“与”)输入点X015和X013单独作为一个回路,去输出控制辅助继电器M1。修改后的程序及其起动过程的监控如图2-27所示。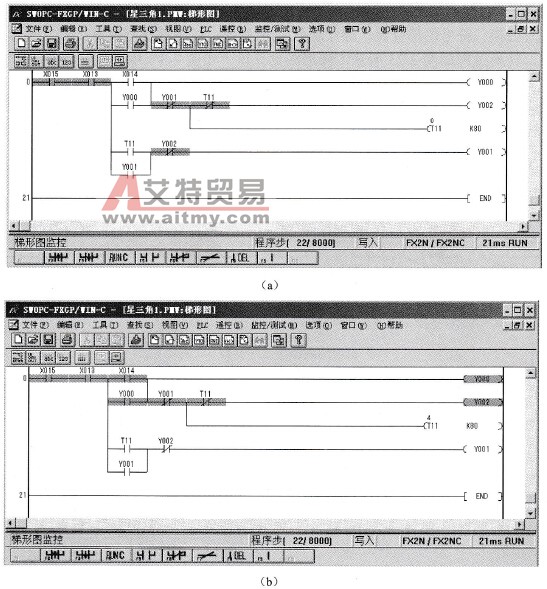
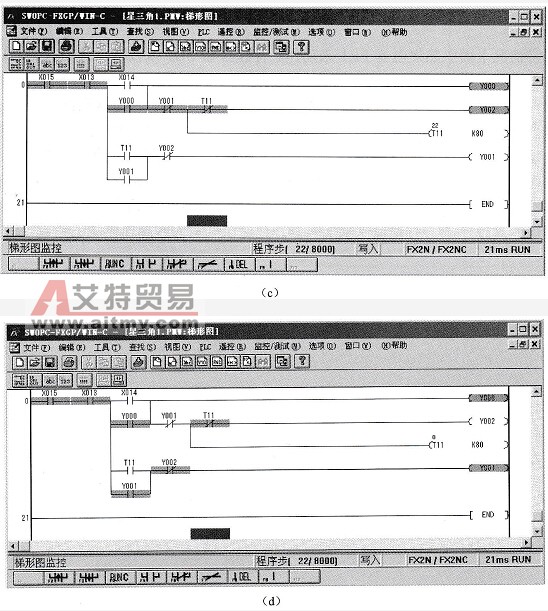
图2-26 电动机Y-△转换过程的监控
(a)电动机未起动状态;(b)按钮SB2按下时间继电器开始计时;(c)按钮SB2松开后星形起动(d)时间继电器开计时到转入三角形运行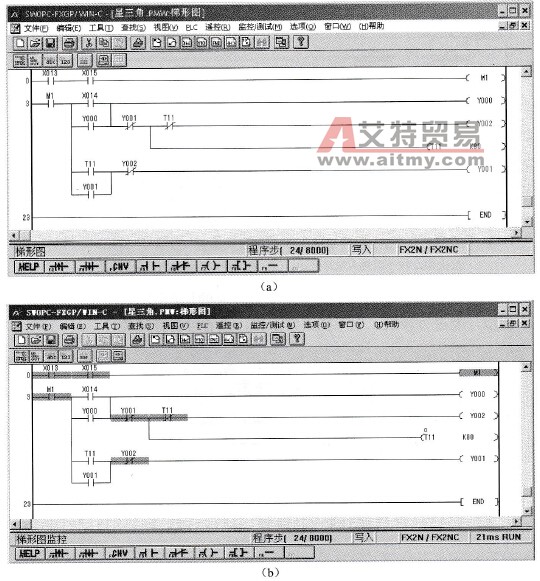
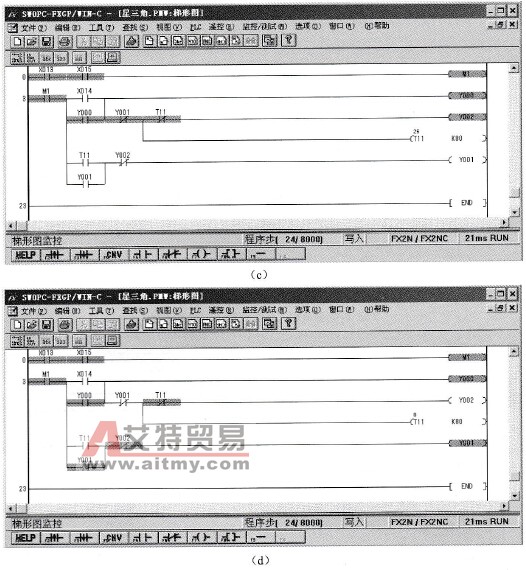
图2-27 修改后的程序及其监控
(a)梯形图;(b)未起动状态(c)按钮SB2按下后进入星形起动;(d)时间继电器计时到后进入三角形运转
直接按图2-23右侧继电器一接触器控制线路绘制的梯形图如图2-28所示。该图初看起来与图2-26相似,能进行转换,但不能正常工作,读者可自行试验。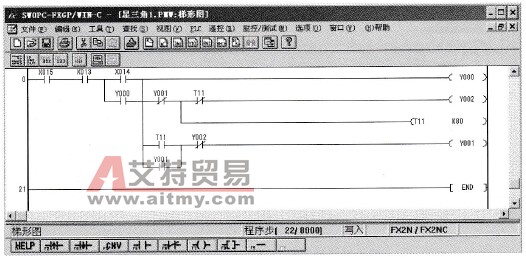
图2-28 错误的电动机Y-△起动梯形图
上面介绍了电动机Y-△起动的两种PLC控制梯形图,在这两个例子中,我们可看到转换过程中输出继电器Y2 -旦释放,另一个输出继电器Yl便马上吸合。由于外接的接触器在线圈得电或失电到主触点的吸合或释放都需要一点时间,因此很可能出现KMS尚未完全释放时KMD就吸合从而造成电源的相间短路。为了避免这种情况的发生,我们可以在Y2释放后再经过一级延时才让Y1吸合。图2-29所示为两级延时的电动机Y-△起动梯形图程序。图中T11是一级延时,时间8s(具体数值应根据实际电机的起动过程来定);T12是二级延时,时间1s。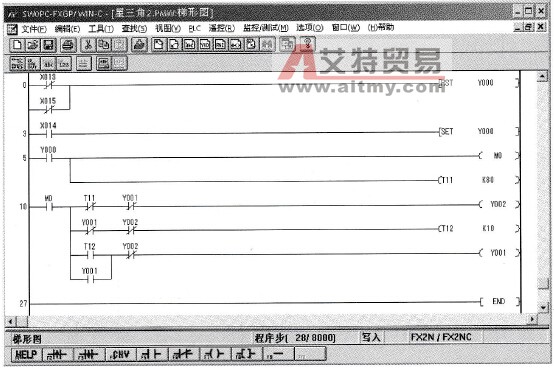
图2-29 两级延时的电动机Y-△起动梯形图

 PLC编程的基本规则
PLC编程的基本规则





