

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介自动扶梯是带有循环运行梯级,用于向上或向下倾斜运输乘客的固定驱动设备。由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯级,用
自动扶梯是带有循环运行梯级,用于向上或向下倾斜运输乘客的固定驱动设备。由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯级,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固定电力驱动设备。运载人员上下的一种连续输送机械。自动扶梯外形如图6-1所示,其由梯路(变型的板式输送机)和两旁的扶手(变形的带式输送机)组成。其主要部件有梯级、牵引链条及链轮、导轨系统、主传动系统(包括电动机、减速装置、制动器及中间传动环节等)、驱动主轴、梯路张紧装置、扶手系统、梳板、扶梯桁架和电气系统等。梯级在乘客入口处作水平运动(方便乘客登梯),以后逐渐形成阶梯;在接近出口处阶梯逐渐消失,梯级再度作水平运动。这些运动都是由梯级主轮、辅轮分别沿不同的梯级导轨行走来实现的。自动扶梯广泛用于商场、超市、地铁、机场等客流量较大的场所。 白动扶梯的主要参数有提升高度、倾斜角度、名义速度、梯级宽度、输送能力、梯级节距和牵引链节距等。自动扶梯出入口两楼层板之间的垂直距离就是提升高度,通常不超过6m。梯级、踏板或胶带运行方向与水平而成的最大角度为倾斜角,通常不超过30°。自动扶梯的名义速度是由制造商设计确定的,自动扶梯的梯级、踏板或胶带在空载情况下的运行速度。在额定频率和额定电压下,梯级、踏板或胶带沿运行方向空载时所测得的速度与名义速度之间的最大允许偏差为±5%。倾角不大于30°时,名义速度不应大于0.75m/s;倾角大于30°但不大于35°时,名义速度不应大于0. 50m/s。自动扶梯的名义宽度不应小于0.58m,也不应大于1.10m。自动扶梯的最大输送能力与梯级或踏板宽度、名义速度有关,一般在3600~8200人/h之间。 图6-1 电扶梯外观图 6.3.1 自动扶梯的控制 1.自动扶梯的驱动 自动扶梯是由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯级,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固定电力驱动设备。因此自动扶梯的运行需要同时驱动一台链式输送机和两台胶带输送机。驱动装置的作用是将动力传递给链式输送机和胶带输送机。驱动装置一般由电动机、减速器、制动器、传动链条、驱动主轴等组成。按驱动装置在自动扶梯的位置可分为端部驱动和中间驱动两种。端部驱动装置以链条为牵引件,其结构形式工艺成熟、维修方便、应用广泛。一种常用的端部驱动结构图6-2所示。不管何种驱动方式,一台驱动主机不应驱动一台以上的自动扶梯。 2.梯级和踏板的驱动 梯级是供乘客站立的特殊结构形式的四轮小车,它主要由踏板、主轴、主轮、支架、辅轮和踢板组成,梯级有整体式和组装式两种。整体式由铝合金整体压铸而成,其精度高、自重轻、加工速度快等特点。组装式梯级由踏板、踢板、撑架等部分拼装而成,其外形结构如图6-3所示。 自动扶梯梯级和踏板的驱动应至少用两根链条驱动,梯级的每侧应不少于一根。故传动主轴上就有两个梯级传动链轮、曳引机传动传动链轮和扶手带传动链轮各一个。曳引主机通过链条拖动主轴转动,从而带动梯级踏板和扶手带运动。曳引主机由电动机、制动器、减速器组成,如图6-4所示。主机通过传动链条拖动驱动主轴旋转,主轴上的两个牵引链轮随之一起转动,拖动装有梯级和踏板的链条向上或向下移动,从而使扶梯上的梯级按设定的方向移动。图6-5是一种常见的梯级、踏板驱动结构。
图6-1 电扶梯外观图 6.3.1 自动扶梯的控制 1.自动扶梯的驱动 自动扶梯是由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯级,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固定电力驱动设备。因此自动扶梯的运行需要同时驱动一台链式输送机和两台胶带输送机。驱动装置的作用是将动力传递给链式输送机和胶带输送机。驱动装置一般由电动机、减速器、制动器、传动链条、驱动主轴等组成。按驱动装置在自动扶梯的位置可分为端部驱动和中间驱动两种。端部驱动装置以链条为牵引件,其结构形式工艺成熟、维修方便、应用广泛。一种常用的端部驱动结构图6-2所示。不管何种驱动方式,一台驱动主机不应驱动一台以上的自动扶梯。 2.梯级和踏板的驱动 梯级是供乘客站立的特殊结构形式的四轮小车,它主要由踏板、主轴、主轮、支架、辅轮和踢板组成,梯级有整体式和组装式两种。整体式由铝合金整体压铸而成,其精度高、自重轻、加工速度快等特点。组装式梯级由踏板、踢板、撑架等部分拼装而成,其外形结构如图6-3所示。 自动扶梯梯级和踏板的驱动应至少用两根链条驱动,梯级的每侧应不少于一根。故传动主轴上就有两个梯级传动链轮、曳引机传动传动链轮和扶手带传动链轮各一个。曳引主机通过链条拖动主轴转动,从而带动梯级踏板和扶手带运动。曳引主机由电动机、制动器、减速器组成,如图6-4所示。主机通过传动链条拖动驱动主轴旋转,主轴上的两个牵引链轮随之一起转动,拖动装有梯级和踏板的链条向上或向下移动,从而使扶梯上的梯级按设定的方向移动。图6-5是一种常见的梯级、踏板驱动结构。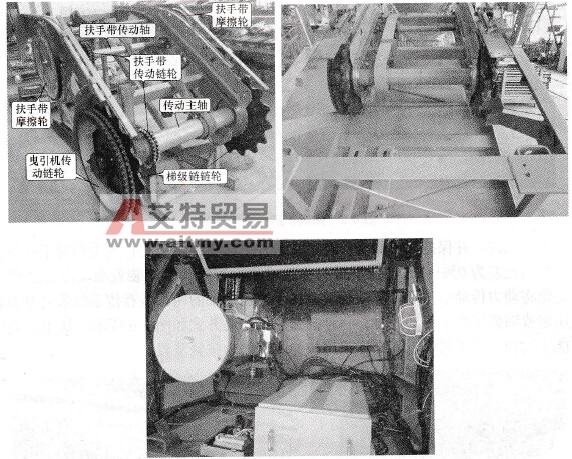 图6-2 一种端部驱动结构
图6-2 一种端部驱动结构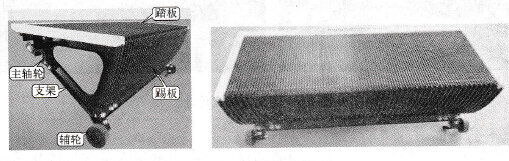 图6-3 梯级结构
图6-3 梯级结构
 图6-4 扶梯曳引主机
图6-4 扶梯曳引主机
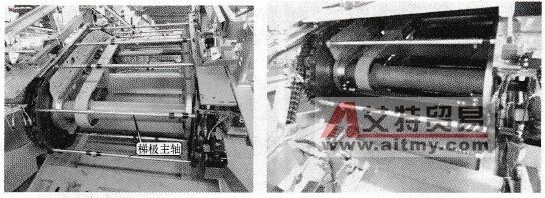 图6-5 梯级、踏板驱动结构 3.胶带的驱动 自动扶梯每一扶手装置的顶部应装有运行的扶手带(即胶带),胶到的运行方向应与梯级、踏板方向相同,并保持保持同步。在正常条件下,扶手带的运行速度相对于梯级、踏板的实际速度的允差为0%~2%。扶手带与梯级、踏板为同一驱动装置驱动,通过驱动主轴中间的链轮将动力传动给扶手带驱动轴上。扶手带驱动轴的两端装有传送胶带的摩擦轮,通过直线压带或圆弧压带来传动胶带。一种圆弧压带传动方式如图6-6所示。扶手带应由滚筒驱动并能连续和自动地张紧,不允许采用拉伸弹簧作为张紧装置。
图6-5 梯级、踏板驱动结构 3.胶带的驱动 自动扶梯每一扶手装置的顶部应装有运行的扶手带(即胶带),胶到的运行方向应与梯级、踏板方向相同,并保持保持同步。在正常条件下,扶手带的运行速度相对于梯级、踏板的实际速度的允差为0%~2%。扶手带与梯级、踏板为同一驱动装置驱动,通过驱动主轴中间的链轮将动力传动给扶手带驱动轴上。扶手带驱动轴的两端装有传送胶带的摩擦轮,通过直线压带或圆弧压带来传动胶带。一种圆弧压带传动方式如图6-6所示。扶手带应由滚筒驱动并能连续和自动地张紧,不允许采用拉伸弹簧作为张紧装置。
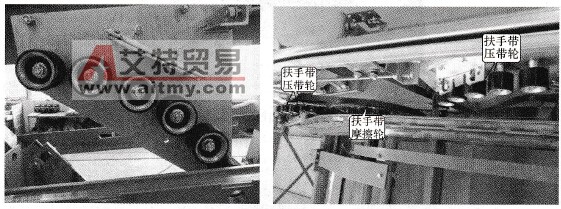 图6-6 圆弧压带式传动 4.电气安全系统 自动扶梯是用于输送乘客的固定电力驱动设备,由于乘坐人员的身体和感官差异性较大,甚至会有一些残障人员使用,因此对自动扶梯的安全性有了进一步的要求。每一台自动扶梯必须具有一个电气安全系统,该系统由安全回路和监测装置构成,是电气控制中与安全相关的部分。当自动扶梯发生可能造成事故的不安全状态时,就要依靠安全系统使自动扶梯停止运行。 (1)安全回路。安全回路是由电气安全装置组成的部分电气安全系统。安全回路通常由若干个安全开关串联而成。安全开关的动作应使其触点强制地机械断开,甚至两触点熔接在一起也应强制地机械断开。当所有触点断开元件处于断开位置时,且在有效行程内,动触点和驱动机构之间无弹性元件施加作用力,即为触点获得强制地机械断开。 自动扶梯的安全开关有驱动链断链安全开关、上右出入口安全开关、上右围裙板安全开关、上右梳齿异常安全开关、上左出人口安全开关、上左围裙板开关、上左梳齿异常安全开关、下右出入口安全开关、下右围裙板开关、下右梳齿板异常安全开关、下左出入口安全开关、下左围裙板安全开关、下左梳齿板异常安全开关等。这些安全开关的分布如图6-7所示。
图6-6 圆弧压带式传动 4.电气安全系统 自动扶梯是用于输送乘客的固定电力驱动设备,由于乘坐人员的身体和感官差异性较大,甚至会有一些残障人员使用,因此对自动扶梯的安全性有了进一步的要求。每一台自动扶梯必须具有一个电气安全系统,该系统由安全回路和监测装置构成,是电气控制中与安全相关的部分。当自动扶梯发生可能造成事故的不安全状态时,就要依靠安全系统使自动扶梯停止运行。 (1)安全回路。安全回路是由电气安全装置组成的部分电气安全系统。安全回路通常由若干个安全开关串联而成。安全开关的动作应使其触点强制地机械断开,甚至两触点熔接在一起也应强制地机械断开。当所有触点断开元件处于断开位置时,且在有效行程内,动触点和驱动机构之间无弹性元件施加作用力,即为触点获得强制地机械断开。 自动扶梯的安全开关有驱动链断链安全开关、上右出入口安全开关、上右围裙板安全开关、上右梳齿异常安全开关、上左出人口安全开关、上左围裙板开关、上左梳齿异常安全开关、下右出入口安全开关、下右围裙板开关、下右梳齿板异常安全开关、下左出入口安全开关、下左围裙板安全开关、下左梳齿板异常安全开关等。这些安全开关的分布如图6-7所示。
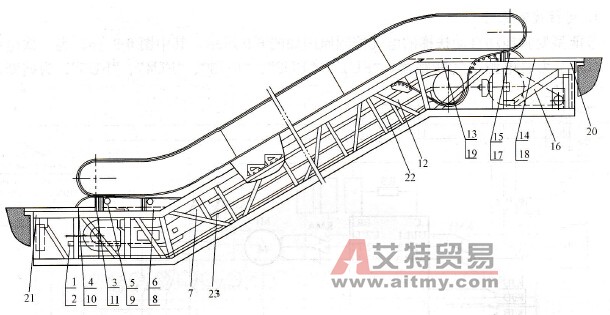 图6-7 安全开关的分布 1-下左曳引链安全开关;2-下右曳引链安全开关;3-下左扶手带出入口安全开关;4-下左梳齿板异常 安全开关;5-左扶手带传感器;6-下左围裙板安全开关;7-下梯级下陷安全开关;8-下右围裙 板安全开关;9-右扶手带测速传感器;10-下右梳齿板异常安全开关;11-下右扶手带出入口 安全开关;12-上梯级下陷安全开关;13-上左围裙板安全开关;14-上左梳齿板异常安全 开关;15-上左扶手带出入口安全开关;16-驱动链安全开关;17上右扶手带出入口 安全开关;18-上右梳齿异常安全开关;19-上右围裙板安全开关;20-上中后 板安全开关;21-下中后板安全开关;22-上部梯级检测传感器;23-下部梯级检测传感器 自动扶梯的安全回路就是将分布在扶梯各处的安全开关用导线串联而成,同时把上/下部停止按钮和上下控制箱的急停按钮串接在其中,形成的电路如图6-8所示。
图6-7 安全开关的分布 1-下左曳引链安全开关;2-下右曳引链安全开关;3-下左扶手带出入口安全开关;4-下左梳齿板异常 安全开关;5-左扶手带传感器;6-下左围裙板安全开关;7-下梯级下陷安全开关;8-下右围裙 板安全开关;9-右扶手带测速传感器;10-下右梳齿板异常安全开关;11-下右扶手带出入口 安全开关;12-上梯级下陷安全开关;13-上左围裙板安全开关;14-上左梳齿板异常安全 开关;15-上左扶手带出入口安全开关;16-驱动链安全开关;17上右扶手带出入口 安全开关;18-上右梳齿异常安全开关;19-上右围裙板安全开关;20-上中后 板安全开关;21-下中后板安全开关;22-上部梯级检测传感器;23-下部梯级检测传感器 自动扶梯的安全回路就是将分布在扶梯各处的安全开关用导线串联而成,同时把上/下部停止按钮和上下控制箱的急停按钮串接在其中,形成的电路如图6-8所示。
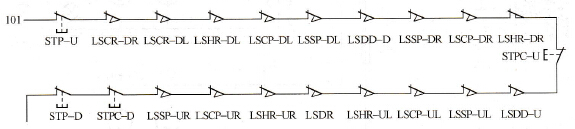 图6-8 安全回路 (2)监测装置。自动扶梯的监测装置用于监测梯级速度、扶手带速度、梯级或踏板的缺失、非操纵逆转等。一旦检测到被监测事件的出现应立即使扶梯停止运行,并防止再起动。检测的方法常用三对接近传感器分别测量扶手带速度、梯级或踏板速度,以及主轴曳引链链轮速度,从而监视扶手带速度、梯级速度和梯级的运行方向,一旦出现扶手带速度偏离梯级、踏板的速度的大于-15%且持续时间大于15s,梯级缺失,和非操纵逆转,便立即停止运行并防止再起动。
图6-8 安全回路 (2)监测装置。自动扶梯的监测装置用于监测梯级速度、扶手带速度、梯级或踏板的缺失、非操纵逆转等。一旦检测到被监测事件的出现应立即使扶梯停止运行,并防止再起动。检测的方法常用三对接近传感器分别测量扶手带速度、梯级或踏板速度,以及主轴曳引链链轮速度,从而监视扶手带速度、梯级速度和梯级的运行方向,一旦出现扶手带速度偏离梯级、踏板的速度的大于-15%且持续时间大于15s,梯级缺失,和非操纵逆转,便立即停止运行并防止再起动。
6.3.2 电气控制原理 在安全系统监测正常的情况下自动扶梯的控制实质上就是曳引主机的运行控制。目前曳引主机传动控制的方式有Y-△降压控制和变频控制两种。自动扶梯的运行方式有自动、检修两种。在自动运行方式时,又分为普通型和节能型两种。下面讨论变频拖动节能型的运行控制原理。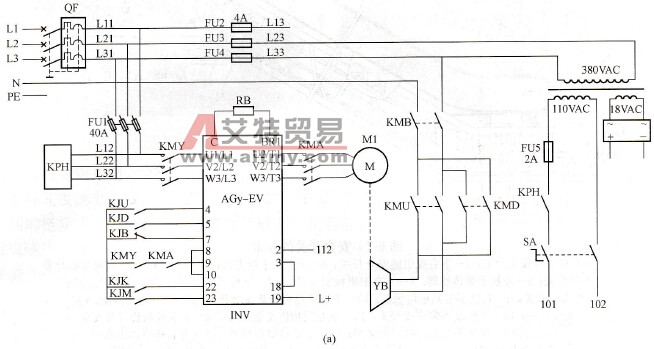
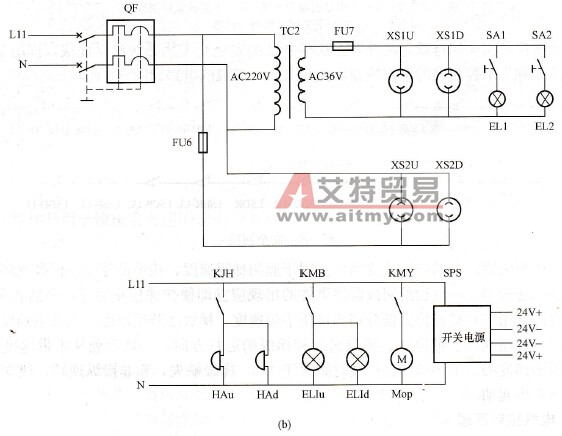
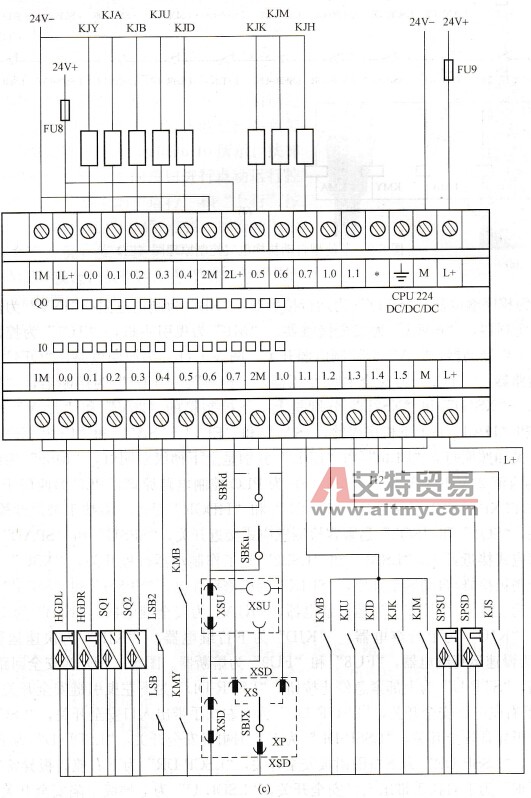
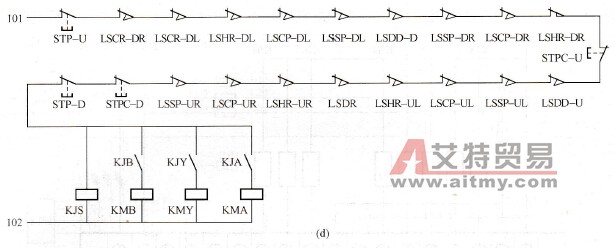 图6-9 节能型自动扶梯电气控制原理图 (a)一次电路;(b)照明供电电路;(c) PLC控制电路;(d)安全回路和接触器驱动电路 1.运行控制原理 节能型变频拖动自动扶梯的电气控制原理如图6-9所示,其中图6-9 (a)为一次电路原理,“QF”为总电源空气断路器,“FU1”、“FU2”、“FU3”、“FU4”、“FU5”、为熔断器, “KPH”为相序继电器,“KMY”为运行接触器,“RB”为制动电阻,“INV”为西威AGy-EV通用变频器, “KMA”为安全接触器,“M1”为曳引主机, “TC1”为控制变压器,“YB”为工作制动器,“SA”为控制电源开关。图6-9 (b)为照明电路,“QF1”为照明电源空气断路器,“TC2”为安全电源变压器,“FU6”、“FU7”为熔断器,“XSIU”和“XS2U”、“XSID”和“XS2D”分别是上、下控制箱的“36V”和“220V”电源插座,“HAu”和“HAd”是上下机房警铃,“SA1”和“EL1”、“SA2”和“EL2”分别是上下机房照明开关和照明灯,“ELlu”和“ELld”分别是上下梯级照明灯,“Mop”为润滑油泵,“SPS”为直流24V开关电源。图6-9 (c)为PLC控制电路原理,PLC为西门子S7-200类型CPU224rFXP可编程序控制器,“HGDL”和“HDGR”是左、右扶手带速度检测感应式接近开关,“SQ1”和“s02”是乘客检测感应式接近开关,“SPSU”和“SPAD”是上下梯级检测感应式接近开关,“LSB1”和“LSB2”是工作制动器行程开关,“XSU”和“XSD”是上下控制箱检修/自动航空插座,“SBJX”为检修操作盒,“SBKu”和“SBKd”是自动扶梯上下端钥匙开关,“KJY”为运行继电器,“KJA”为安全继电器,“KJB”为工作制动器继电器,“KJU”为上行继电器,“KJD”为下行继电器,“KJK”为快速运行继电器,“KJM”为慢速运行继电器,“FU8”和“FU9”为熔断器。图6-9 (d)为安全回路和接触器驱动电路,“STP-U”为上部紧急停止按钮,“LSCR-DL”为下左曳引链安全开关,“LSCR-DR”为下右曳引链安全开关,“LSHR-DL”为下左扶手带出入口安全开关,“LSCP-DL”为下左梳齿板异常安全开关,“LSSP-DL”为下左围裙板安全开关,“LSDD-D”为下梯级下陷安伞开关,“LSSP-DR”为下右围裙板安全开关,“LSCP-DR”为下右梳齿板异常安全开关,“LSHR-DR”为下右扶手带出人口安全开关,“LSDD-U”为上梯级下陷安全开关,“I。SSPUL”为上左围裙板安全开关,“LSCP-UL”为上左梳齿板异常安全开关,“LSHR-UL”为上左扶手带出入口安全开关,“LSDR”为驱动链安全开关,“LSHR-UR”为上右扶手带出入口安全开关,“LSCP-UR”为上右梳齿异常安全开关,“LSSP-UR”为上右围裙板安全开关,“LSJF-U”为上中后板安全开关,“LSJF-D”为下中后板安全开关,“SPSU”为上部梯级检测传感器,“SPSD”为下部梯级检测传感器,“KJS”为安全继电器,“KMB”为工作制动器接触器,“KMY”为运行接触器,“KMA”为安全接触器。 (1)检修方式。当用连接有检修运行操作器的航空插头取代上机箱或下机箱航空插座上的附加插头,自动扶梯控制系统就处在“检修”运行方式。此时PLC输入点“I0.3”的指示灯是熄灭的。自动扶梯处在“检修”方式时,扶梯上、下部侧的钥匙开关就失去控制作用。外接自动运行航空插头和带航空插头的检修控制盒的外形如图6-10所示。扶梯只能通过外接控制操作器上的按钮进行点动运行控制,若同时按住操作器上的“运行”和“上行”按钮,则PLC上的输入点“I0.4”点亮,接着相关输出和输入点相继点亮,安全接触器“KMA”、运行接触器“KMY”吸合、工作制动器接触器“KMB”吸合、上行继电器“KMU”吸合、段速控制继电器KJK和KJM一起吸合,→主电动机“M1”正转,扶梯以检修速度运行。松开检修操作器上的“运行”或“上行”按钮,段速控制继电器“KJK”和“KJM”、上行继电器“KMU”、工作制动器接触器“KMB”、运行接触器“KMY”、安全接触器“KMA”相继释放,扶梯就停止运行。
图6-9 节能型自动扶梯电气控制原理图 (a)一次电路;(b)照明供电电路;(c) PLC控制电路;(d)安全回路和接触器驱动电路 1.运行控制原理 节能型变频拖动自动扶梯的电气控制原理如图6-9所示,其中图6-9 (a)为一次电路原理,“QF”为总电源空气断路器,“FU1”、“FU2”、“FU3”、“FU4”、“FU5”、为熔断器, “KPH”为相序继电器,“KMY”为运行接触器,“RB”为制动电阻,“INV”为西威AGy-EV通用变频器, “KMA”为安全接触器,“M1”为曳引主机, “TC1”为控制变压器,“YB”为工作制动器,“SA”为控制电源开关。图6-9 (b)为照明电路,“QF1”为照明电源空气断路器,“TC2”为安全电源变压器,“FU6”、“FU7”为熔断器,“XSIU”和“XS2U”、“XSID”和“XS2D”分别是上、下控制箱的“36V”和“220V”电源插座,“HAu”和“HAd”是上下机房警铃,“SA1”和“EL1”、“SA2”和“EL2”分别是上下机房照明开关和照明灯,“ELlu”和“ELld”分别是上下梯级照明灯,“Mop”为润滑油泵,“SPS”为直流24V开关电源。图6-9 (c)为PLC控制电路原理,PLC为西门子S7-200类型CPU224rFXP可编程序控制器,“HGDL”和“HDGR”是左、右扶手带速度检测感应式接近开关,“SQ1”和“s02”是乘客检测感应式接近开关,“SPSU”和“SPAD”是上下梯级检测感应式接近开关,“LSB1”和“LSB2”是工作制动器行程开关,“XSU”和“XSD”是上下控制箱检修/自动航空插座,“SBJX”为检修操作盒,“SBKu”和“SBKd”是自动扶梯上下端钥匙开关,“KJY”为运行继电器,“KJA”为安全继电器,“KJB”为工作制动器继电器,“KJU”为上行继电器,“KJD”为下行继电器,“KJK”为快速运行继电器,“KJM”为慢速运行继电器,“FU8”和“FU9”为熔断器。图6-9 (d)为安全回路和接触器驱动电路,“STP-U”为上部紧急停止按钮,“LSCR-DL”为下左曳引链安全开关,“LSCR-DR”为下右曳引链安全开关,“LSHR-DL”为下左扶手带出入口安全开关,“LSCP-DL”为下左梳齿板异常安全开关,“LSSP-DL”为下左围裙板安全开关,“LSDD-D”为下梯级下陷安伞开关,“LSSP-DR”为下右围裙板安全开关,“LSCP-DR”为下右梳齿板异常安全开关,“LSHR-DR”为下右扶手带出人口安全开关,“LSDD-U”为上梯级下陷安全开关,“I。SSPUL”为上左围裙板安全开关,“LSCP-UL”为上左梳齿板异常安全开关,“LSHR-UL”为上左扶手带出入口安全开关,“LSDR”为驱动链安全开关,“LSHR-UR”为上右扶手带出入口安全开关,“LSCP-UR”为上右梳齿异常安全开关,“LSSP-UR”为上右围裙板安全开关,“LSJF-U”为上中后板安全开关,“LSJF-D”为下中后板安全开关,“SPSU”为上部梯级检测传感器,“SPSD”为下部梯级检测传感器,“KJS”为安全继电器,“KMB”为工作制动器接触器,“KMY”为运行接触器,“KMA”为安全接触器。 (1)检修方式。当用连接有检修运行操作器的航空插头取代上机箱或下机箱航空插座上的附加插头,自动扶梯控制系统就处在“检修”运行方式。此时PLC输入点“I0.3”的指示灯是熄灭的。自动扶梯处在“检修”方式时,扶梯上、下部侧的钥匙开关就失去控制作用。外接自动运行航空插头和带航空插头的检修控制盒的外形如图6-10所示。扶梯只能通过外接控制操作器上的按钮进行点动运行控制,若同时按住操作器上的“运行”和“上行”按钮,则PLC上的输入点“I0.4”点亮,接着相关输出和输入点相继点亮,安全接触器“KMA”、运行接触器“KMY”吸合、工作制动器接触器“KMB”吸合、上行继电器“KMU”吸合、段速控制继电器KJK和KJM一起吸合,→主电动机“M1”正转,扶梯以检修速度运行。松开检修操作器上的“运行”或“上行”按钮,段速控制继电器“KJK”和“KJM”、上行继电器“KMU”、工作制动器接触器“KMB”、运行接触器“KMY”、安全接触器“KMA”相继释放,扶梯就停止运行。
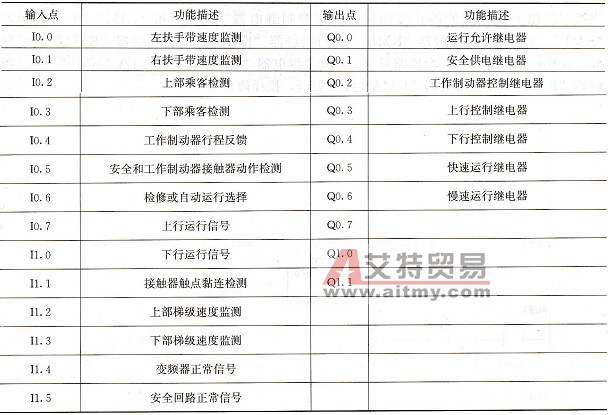
 图6-10 运行插头和检修控制盒 (a)自动运行航空插头;(b)带航空插头的检修盒 (2)自动方式。自动扶梯上机箱或下机箱的航空插座上都插上附加插头,电扶梯就处在“自动”运行方式。此时PLC输入点“I0.3”的指示灯是点亮的。电扶梯的上下行控制由扶梯上/下部侧的钥匙开关控制,顺时针或逆时针转动钥匙开关可使电扶梯上行或下行。若顺时针转动,扶梯上和下机房的警铃鸣响,松开钥匙开关警铃声熄灭转入起动过程,安全接触器“KMA”、运行接触器“KMY”吸合、工作制动器接触器“KMB”吸合、上行继电器“KMU”吸合、段速控制继电器“KJK”吸合,→主电动机“M1”正转,自动扶梯上行运行。若逆时针转动,同样扶梯上和下机房的警铃鸣响,松开钥匙开关警铃声熄灭转入起动过程,安全接触器“KMA”、运行接触器“KMY”吸合、工作制动器接触器“KMB”吸合、下行继电器“KMD”吸合、段速控制继电器“KJK”吸合,→主电动机“M1”正转,自动扶梯下行运行。当没有乘客乘坐自动扶梯时,自动扶梯运行一段时间后,高速继电器“KJK”释放,低速继电器“KJM”吸合,扶梯进入低速节能方式运行。若传感器“SQ1”或“SQ2”检测到有乘客乘坐时,低速继电器“KJM”释放,高速继电器“KJK”吸合,扶梯进入高速正常运行。 (3)停止。扶梯在运行状态中,将钥匙开关按当前运行的反方向旋转,自动扶梯进入软停车,段速控制继电器“KJK”和“KJM”、上行接触器“KMU”、工作制动器接触器“KMB”、运行接触器“KMY”、安全接触器“KMA”相继逐个释放,最终扶梯停止运行。当按下扶梯E下两端的停止按钮时,段速控制继电器“KJK”和“KJM”、上行接触器“KMU”、工作制动器接触器“KMB”、运行接触器“KMY”、安全接触器“KMA”同时释放,扶梯停止运行。当安全回路异常时,安全继电器“KJS”、工作制动器“KMB”、运行接触器“KMY”、安全接触器“KMA”线圈失电,扶梯停止运行。 2.安全监测要求 自动扶梯曳引机的拖动虽然比较简单,不是Y-△切换,就是变频器驱动。但是由于它是用来输送人员的运输机械,为此对使用人员和维护人员的安全是十分重要的。因此除了传统的做法外,还提出了特殊的要求。 自动扶梯由使用者经过某一点的自动起动或投入自动运行状态,应只能由被授权的人员通过操作一个或数个开关来实现。一台驱动主机不应驱动一台以上的自动扶梯。电源应由两个独立的接触器切断,这些接触器的触点应串接在供电回路中。当自动扶梯停止时,如果其中任一接触器的主触点未打开,则自动扶梯不能重新起动。自动扶梯应设置一个制动系统,该系统使自动扶梯有一个接近匀减速的制停过程直至停机,并使其保持停止状态。当电气安全装置动作时,应能防止驱动主机起动或立即使其停止。工作制动器应起作用。 自动扶梯在起动过程中,若存在主要接触器有触点黏连现象,则应不能起动。自动扶梯完成起动后,若制动器未释放,应终止起动并防止在起动。在运行过程中,自动扶梯的运行速度超过名义速度的1.2倍之前应自动停止运行;若出现梯级、踏板或胶带的运行方向与规定的运行方向不一致时应自动停止运行;若出现梯级或踏板的缺失,则应在由梯级或踏板缺失而导致的缺口从梳齿板位置出现之前停止运行;当扶手带速度偏离梯级、踏板实际速度大于-15%且持续时问大于15s时,应使自动扶梯停止运行;打开或移去桁架区域的检修盖板或打开楼层板时,在重新起动之前,驱动主机不能起动或立即停止;如果制停距离超过所规定最大值的1.2倍,自动扶梯应在故障锁定被复位之后才能重新起动等。 从上面自动扶梯控制要求知道,对于采用变频器拖动的自动扶梯控制,除了要对变频器进行正转(上行)或反转(下行)控制外,还需要根据不同的工作方式或状态给定不同的运行速度。自动扶梯在“检修”工作方式运行时,需要给定低于正常运行速度的检修速度运行。在“自动”方式运行时,有乘客需要输送时需要以正常速度运行;当没有乘客输送时自动扶梯将以一个合适的低速度保持运行,以减少电能的消耗。也就是说,变频器是处于多段速运行。 自动扶梯在起动过程中,需要对有关接触器或继电器的状态进行检测。当有接触器或继电器的触点发生黏连时,应防止起动。当出现某只接触器或继电器不动作时,应停止起动。 自动扶梯在运行过程中,需要对扶手带速度、梯级或踏板的速度、梯级或踏板的缺失、扶梯的非操纵逆转等进行监测,一旦出现异常立即停止扶梯的运行,并防止再起动。 自动扶梯在停止过程中,需要对制动距离进行监测,制停距离应在规定的范围内。 本节的目的并不是讨论自动扶梯控制程序的编写,而是讨论PLC控制程序的结构,因此仅用自动扶梯控制中的运行控制、自学习、扶手带速度监测这3个功能进行程序结构的讨论。图6-9 (c)中PLC输入输出点的配置见表6-1。 表6-1 PLC输入输出点分配
图6-10 运行插头和检修控制盒 (a)自动运行航空插头;(b)带航空插头的检修盒 (2)自动方式。自动扶梯上机箱或下机箱的航空插座上都插上附加插头,电扶梯就处在“自动”运行方式。此时PLC输入点“I0.3”的指示灯是点亮的。电扶梯的上下行控制由扶梯上/下部侧的钥匙开关控制,顺时针或逆时针转动钥匙开关可使电扶梯上行或下行。若顺时针转动,扶梯上和下机房的警铃鸣响,松开钥匙开关警铃声熄灭转入起动过程,安全接触器“KMA”、运行接触器“KMY”吸合、工作制动器接触器“KMB”吸合、上行继电器“KMU”吸合、段速控制继电器“KJK”吸合,→主电动机“M1”正转,自动扶梯上行运行。若逆时针转动,同样扶梯上和下机房的警铃鸣响,松开钥匙开关警铃声熄灭转入起动过程,安全接触器“KMA”、运行接触器“KMY”吸合、工作制动器接触器“KMB”吸合、下行继电器“KMD”吸合、段速控制继电器“KJK”吸合,→主电动机“M1”正转,自动扶梯下行运行。当没有乘客乘坐自动扶梯时,自动扶梯运行一段时间后,高速继电器“KJK”释放,低速继电器“KJM”吸合,扶梯进入低速节能方式运行。若传感器“SQ1”或“SQ2”检测到有乘客乘坐时,低速继电器“KJM”释放,高速继电器“KJK”吸合,扶梯进入高速正常运行。 (3)停止。扶梯在运行状态中,将钥匙开关按当前运行的反方向旋转,自动扶梯进入软停车,段速控制继电器“KJK”和“KJM”、上行接触器“KMU”、工作制动器接触器“KMB”、运行接触器“KMY”、安全接触器“KMA”相继逐个释放,最终扶梯停止运行。当按下扶梯E下两端的停止按钮时,段速控制继电器“KJK”和“KJM”、上行接触器“KMU”、工作制动器接触器“KMB”、运行接触器“KMY”、安全接触器“KMA”同时释放,扶梯停止运行。当安全回路异常时,安全继电器“KJS”、工作制动器“KMB”、运行接触器“KMY”、安全接触器“KMA”线圈失电,扶梯停止运行。 2.安全监测要求 自动扶梯曳引机的拖动虽然比较简单,不是Y-△切换,就是变频器驱动。但是由于它是用来输送人员的运输机械,为此对使用人员和维护人员的安全是十分重要的。因此除了传统的做法外,还提出了特殊的要求。 自动扶梯由使用者经过某一点的自动起动或投入自动运行状态,应只能由被授权的人员通过操作一个或数个开关来实现。一台驱动主机不应驱动一台以上的自动扶梯。电源应由两个独立的接触器切断,这些接触器的触点应串接在供电回路中。当自动扶梯停止时,如果其中任一接触器的主触点未打开,则自动扶梯不能重新起动。自动扶梯应设置一个制动系统,该系统使自动扶梯有一个接近匀减速的制停过程直至停机,并使其保持停止状态。当电气安全装置动作时,应能防止驱动主机起动或立即使其停止。工作制动器应起作用。 自动扶梯在起动过程中,若存在主要接触器有触点黏连现象,则应不能起动。自动扶梯完成起动后,若制动器未释放,应终止起动并防止在起动。在运行过程中,自动扶梯的运行速度超过名义速度的1.2倍之前应自动停止运行;若出现梯级、踏板或胶带的运行方向与规定的运行方向不一致时应自动停止运行;若出现梯级或踏板的缺失,则应在由梯级或踏板缺失而导致的缺口从梳齿板位置出现之前停止运行;当扶手带速度偏离梯级、踏板实际速度大于-15%且持续时问大于15s时,应使自动扶梯停止运行;打开或移去桁架区域的检修盖板或打开楼层板时,在重新起动之前,驱动主机不能起动或立即停止;如果制停距离超过所规定最大值的1.2倍,自动扶梯应在故障锁定被复位之后才能重新起动等。 从上面自动扶梯控制要求知道,对于采用变频器拖动的自动扶梯控制,除了要对变频器进行正转(上行)或反转(下行)控制外,还需要根据不同的工作方式或状态给定不同的运行速度。自动扶梯在“检修”工作方式运行时,需要给定低于正常运行速度的检修速度运行。在“自动”方式运行时,有乘客需要输送时需要以正常速度运行;当没有乘客输送时自动扶梯将以一个合适的低速度保持运行,以减少电能的消耗。也就是说,变频器是处于多段速运行。 自动扶梯在起动过程中,需要对有关接触器或继电器的状态进行检测。当有接触器或继电器的触点发生黏连时,应防止起动。当出现某只接触器或继电器不动作时,应停止起动。 自动扶梯在运行过程中,需要对扶手带速度、梯级或踏板的速度、梯级或踏板的缺失、扶梯的非操纵逆转等进行监测,一旦出现异常立即停止扶梯的运行,并防止再起动。 自动扶梯在停止过程中,需要对制动距离进行监测,制停距离应在规定的范围内。 本节的目的并不是讨论自动扶梯控制程序的编写,而是讨论PLC控制程序的结构,因此仅用自动扶梯控制中的运行控制、自学习、扶手带速度监测这3个功能进行程序结构的讨论。图6-9 (c)中PLC输入输出点的配置见表6-1。 表6-1 PLC输入输出点分配
6.3.3 线性化编程 线性化编程方法法也称为线性推进编程法,是最基本的程序设计方法。该方法只注重功能的实现,常用于功能单一的控制系统,或用于功能比较简单的程序设计中。编程时,按PLC的工作机制,依据PI)C输入输出的控制要求,一个网络一个网络地顺序编写,有次序地逐一执行某个功能的操作,最终完成程序设计。程序的编写顺序与程序的执行次序是一致的,故称为线性化编程法。线性化程序结构简单,一目了然,对于具有起动/停止控制任务、扶手带速度监测任务、自学习任务的自动扶梯控制程序,其线性化编程的结构如图6-11 (a)所示,梯形图程序如图6-12所示。图中“网络1”为初始化任务,“网络2”至“网络19”是起动/停止控制任务,“网络20”至“网络31”是扶手带速度监测控制任务,“网络32”至“网络45”是自学习控制任务。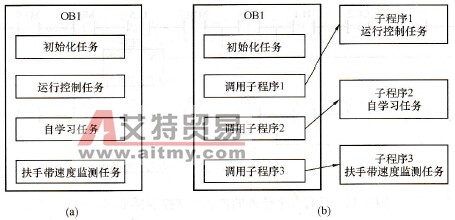 图6-11 程序结构 (a)线性化结构;(b)模块化结构
图6-11 程序结构 (a)线性化结构;(b)模块化结构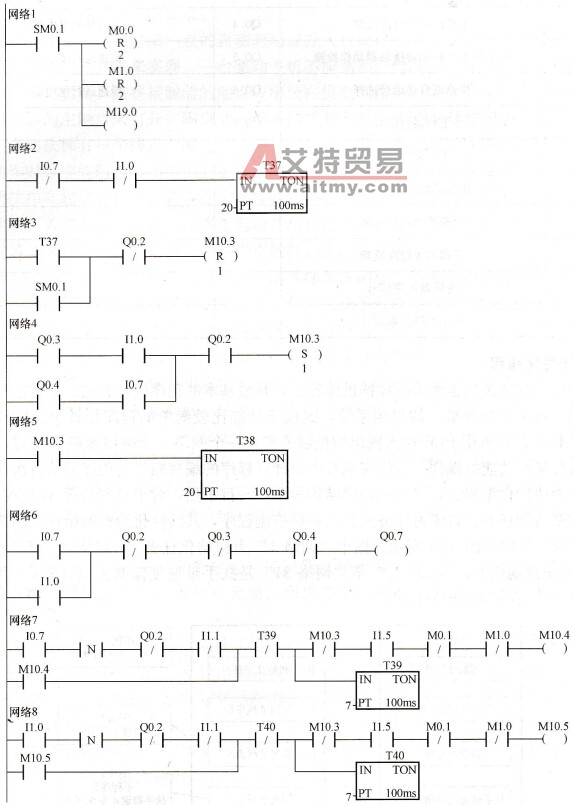 图6-12 具有3个任务的自动扶梯控制梯形图(一)
图6-12 具有3个任务的自动扶梯控制梯形图(一)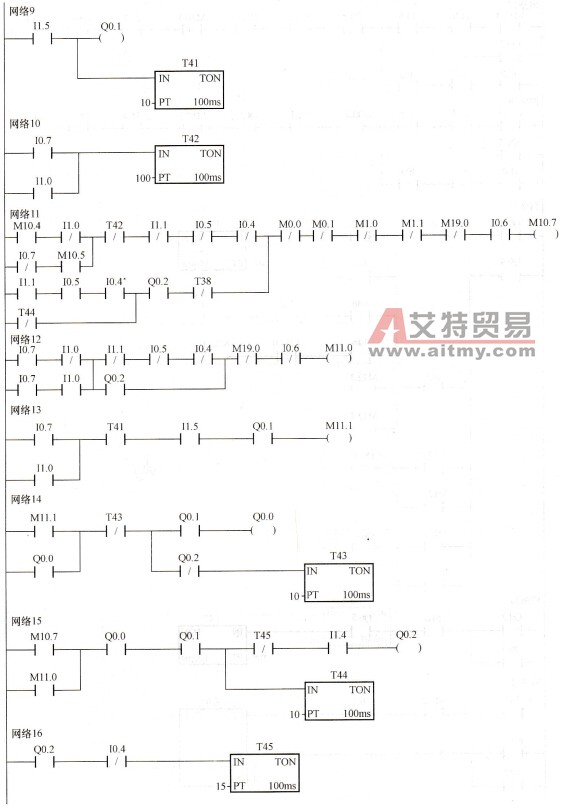 图6-12 具有3个任务的自动扶梯控制梯形图(二)
图6-12 具有3个任务的自动扶梯控制梯形图(二)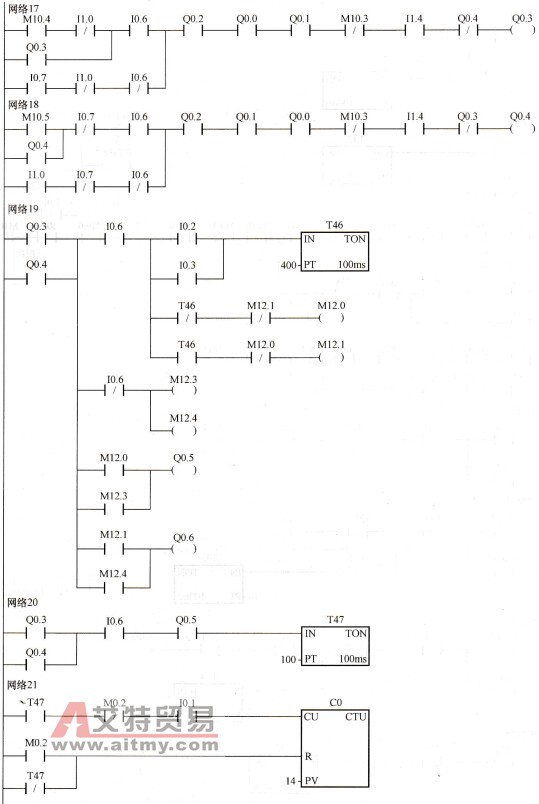 图6-12 具有3个任务的自动扶梯控制梯形图(三)
图6-12 具有3个任务的自动扶梯控制梯形图(三)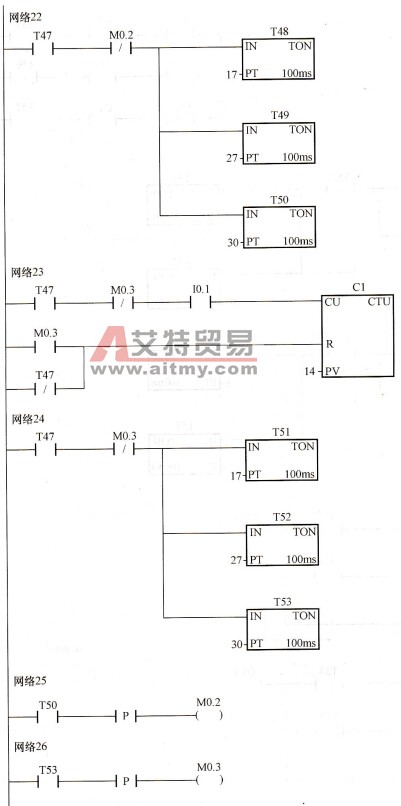 图6-12 具有3个任务的自动扶梯控制梯形图(四)
图6-12 具有3个任务的自动扶梯控制梯形图(四)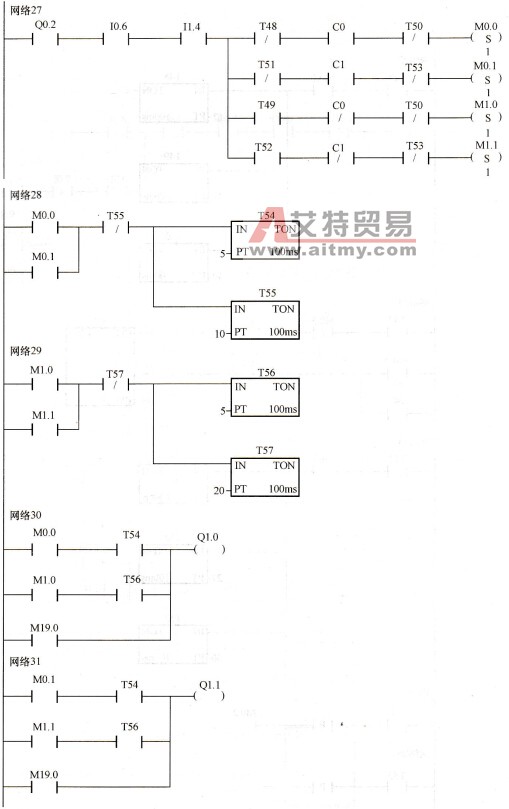 图6-12 具有3个任务的自动扶梯控制梯形图(五)
图6-12 具有3个任务的自动扶梯控制梯形图(五)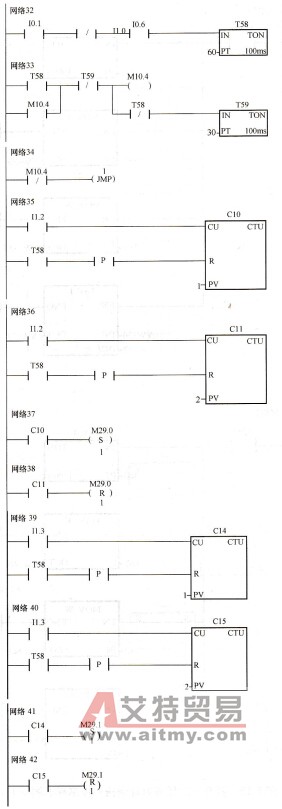 图6-12 具有3个任务的自动扶梯控制梯形图(六)
图6-12 具有3个任务的自动扶梯控制梯形图(六)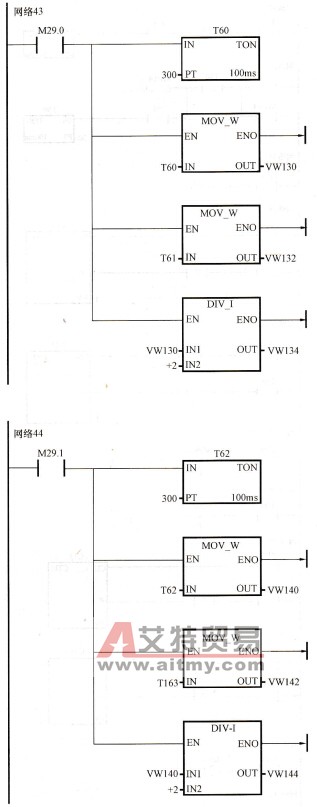 图6-12 具有3个任务的自动扶梯控制梯形图(七)
图6-12 具有3个任务的自动扶梯控制梯形图(七)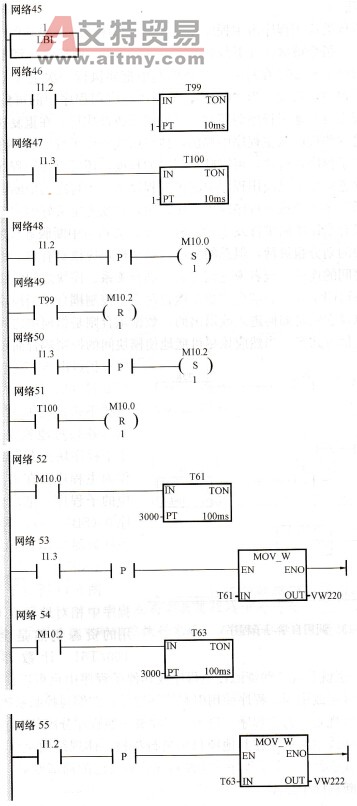 图6-12 具有3个任务的自动扶梯控制梯形图(八)
图6-12 具有3个任务的自动扶梯控制梯形图(八)
6.3.4 模块化编程 采用模块化编程的应用程序南主程序和若干个子程序或中断服务程序组成,一个程序块由指令和注释组成。指令被编译并下载到S7-200 CPU中,而程序注释不会被下载。主程序中包括程序控制指令。S7-200在每一个扫描周期中都要执行一次主程序,顺序执行主程序中的这些指令。主程序也被表示为“OB1”。子程序是应用程序中的可选程序块。只有被主程序、中断服务程序或其他子程序调用时,子程序才或被执行。在重复执行某项功能时,子程序非常有用。将这些代码从主程序中移出,独自组成一个子程序块,在主程序中不同位置根据需要调用这个子程序。这样,可以减小程序的长度,还町以缩短程序扫描周期,便于程序的移植。中断服务程序也是应用程序中的可选程序块。当特定的中断事件发生时,中断服务程序执行。中断程序不会被主程序或子程序调用,若预先定义好的中断事件设计了一个中断服务程序后,只有当该中断事件发生时,S7-200才会执行中断服务程序。 在实际中模块的划分很灵活,但总的来说,每个模块应该具有独立的功能。此外,还应该考虑各个模块之问的连续,或者说它们之间的耦合关系。模块之间的总有各种各样的耦合关系,其问的联系可归结为控制耦合和数据耦合两类。控制耦合是指模块应该在怎样的条件下进入或退出,以及它们是如何进入或退出的。数据耦合则是指模块之间的信息通信,信息量的多少集信息通信方式等。当然应该尽可能地使模块间的控制耦合简单、数据耦合最小。 仍以图6-12控制程序为例,按照图6-11 (b)所示的模块化方法编制,将扶手带速度监测、自学习这两个控制任务相对地独立出来,分别占用一个子程序块。而把起动/停止控制任务作为主程序,在需要的时候再调用相应的子程序。把自学习任务作为子程序0(SBR_0),调用自学习子程序的条件如图6-13所示,自学习子程序如图6-14所示。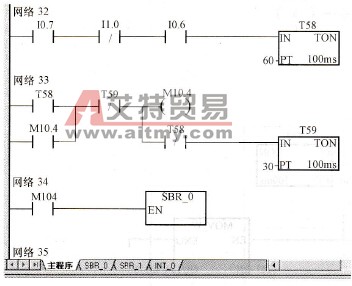 图6-13 调用自学习子程序 图6-14所示子程序在形式上从主程序中相对地独立开了,但是它所使用的资源仍然是全局的,如定时器T60/T61、计数器C10/C11、变量VW130/W140等。也就是说这些资源在主程序或其他子程序中也可以使用,因此为了防止同一资源被多个子(主或中断)程序使用引起控制混乱,在编写控制系统的整个程序前必须对所使用的资源进行规划,为主程序、每个子程序或中断程序分配各自使用的资源。 为了便于子程序或中断程序在其他项目中进行移植,体现结构化程序设计的优点,S7-200提供了四种局部变量。每个子程序或中断程序均有自己的局部变量,局部变量只能在它所在的子程序或中断程序中使用。
图6-13 调用自学习子程序 图6-14所示子程序在形式上从主程序中相对地独立开了,但是它所使用的资源仍然是全局的,如定时器T60/T61、计数器C10/C11、变量VW130/W140等。也就是说这些资源在主程序或其他子程序中也可以使用,因此为了防止同一资源被多个子(主或中断)程序使用引起控制混乱,在编写控制系统的整个程序前必须对所使用的资源进行规划,为主程序、每个子程序或中断程序分配各自使用的资源。 为了便于子程序或中断程序在其他项目中进行移植,体现结构化程序设计的优点,S7-200提供了四种局部变量。每个子程序或中断程序均有自己的局部变量,局部变量只能在它所在的子程序或中断程序中使用。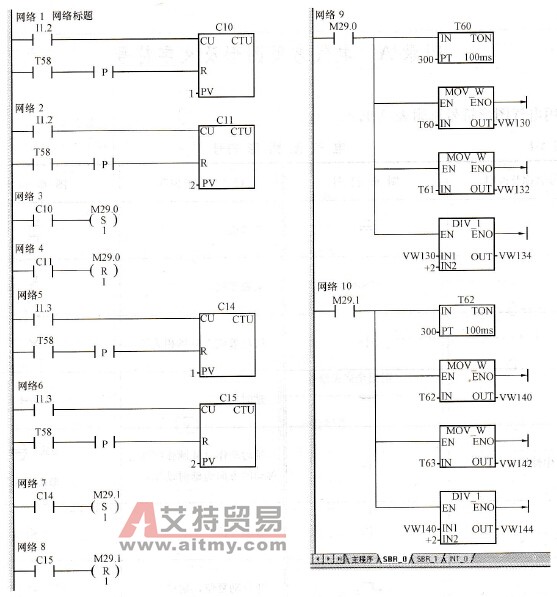 图6-14 自学习子程序 子程序的四种局部变量: (1)临时变量TEMP是暂时保存在局部数据堆栈中的局部变量。只有在调用时才能使用它的临时变量,子程序或中断程序执行完后,不再保存临时变量的值。主程序和中断程序只有临时变量。 (2)输入参数IN的值由调用它的主程序、子程序或中断程序提供。 (3)输出参数OUT用来将功能的执行结果返回给调用它的主程序、子程序或中断程序。 (4)输入输出参数IN-OUT,其初始值由调用它的主程序、子程序或中断程序传送给子程序,并用同一变量将子程序的执行结果返回给调用它的主程序、子程序或中断程序。 使用具有输入、输出参数和局部变量的子程序,实现真正的结构化编程后,即使不知子程序内部的梯形图,只要知道子程序的功能及其输入、输出参数的意义,就可以通过调用来完成所需操作任务。这样做不仅使整个控制程序的结构清晰、易于移植,而且通过对某些子程序进行设置密码管理,有利于知识产权的保护。
图6-14 自学习子程序 子程序的四种局部变量: (1)临时变量TEMP是暂时保存在局部数据堆栈中的局部变量。只有在调用时才能使用它的临时变量,子程序或中断程序执行完后,不再保存临时变量的值。主程序和中断程序只有临时变量。 (2)输入参数IN的值由调用它的主程序、子程序或中断程序提供。 (3)输出参数OUT用来将功能的执行结果返回给调用它的主程序、子程序或中断程序。 (4)输入输出参数IN-OUT,其初始值由调用它的主程序、子程序或中断程序传送给子程序,并用同一变量将子程序的执行结果返回给调用它的主程序、子程序或中断程序。 使用具有输入、输出参数和局部变量的子程序,实现真正的结构化编程后,即使不知子程序内部的梯形图,只要知道子程序的功能及其输入、输出参数的意义,就可以通过调用来完成所需操作任务。这样做不仅使整个控制程序的结构清晰、易于移植,而且通过对某些子程序进行设置密码管理,有利于知识产权的保护。

 PLC编程的基本规则
PLC编程的基本规则





