

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介电扶梯又称自动扶梯,是由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯级,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固
电扶梯又称自动扶梯,是由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯级,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固定电力驱动设备。运载人员上下的一种连续输送机械。自动扶梯由梯路(变型的板式输送机)和两旁的扶手(变形的带式输送机)组成。其主要部件有梯级、牵引链条及链轮、导轨系统、主传动系统(包括电动机、减速装置、制动器及中间传动环节等)、驱动主轴、梯路张紧装置、扶手系统、梳板、扶梯骨架和电气系统等。梯级在乘客入口处作水平运动(方便乘客登梯),以后逐渐形成阶梯;在接近出口处阶梯逐渐消失,梯级再度作水平运动。这些运动都是由梯级主轮、辅轮分别沿不同的梯级导轨行走来实现的。自动扶梯广泛用于商场、超市、地铁、机场等客流量较大的场所。 自动扶梯的主要参数有提升高度(一般在10m以内,特殊情况可到几十米)、倾斜角度(一般为300、350)、速度(一般为0.5m/s)、梯级宽度(单人的600~800mm,双人的1000~1200mm)、输送能力(单人的4000~5000人m,双人的8000~12000人m)、梯级节距和牵引链节距等。 一、继电器-接触器控制原理图分析 用继电器-接触器控制电扶梯运行的电路如图4-32所示。 图4-32 (a)线路实际上就是一台曳引电动机Y-△起动的正反转运行。图中QF为主电源开关,电动机MT为曳引机电动机,MB为抱闸电动机,FR1和FRB分别是两台电动机的热保护继电器,KMU为上行接触器,KMD为下行接触器,KMS为星形起动接触器,KMT为三角形起动接触器,KPH为相序继电器,T1为控制变压器,T2为照明电源变压器。 图4-32 (b)中KC为运行继电器,KB为抱闸动作检测继电器,KF为扶手带监控继电器,KJ为检修继电器,KMU为上行接触器,KMD为下行接触器,KMS为星形起动接触器,KMT为三角形起动接触器,KT为转换时间继电器,KAL为梯级照明接触器。SA1检修运行开关,SA2扶手带监控投入开关,GKC为安全回路输出继电器。 合上主电源开关QF和控制电源开关K1,控制变压器B1工作,01-02两端输出交流220V。在各停止按钮未被按下、热继电器未动作、电源相序正确、安全回路正常情况下,运行继电器KC吸合。 (1)检修状态。当检修运行开关SA1打在[27]位置,电扶梯处在“检修”状态;扶梯上、下两侧的钥匙开关失去控制,此时检修继电器KJ吸合,其动合触点闭合、动断触点断开。扶梯只能通过外接控制按钮盒进行点动控制,主电动机连接成星形寸动。例如上行,按住按钮→KMU吸合→KMB吸合→KMS吸合→主电动机MT正转。 (2)运行状态。当检修运行开关SA1打在[33]位置,电扶梯处在“运行”状态;检修继电器KJ释放。电扶梯由扶梯上、下两侧的钥匙开关控制,顺时针或逆时针转动钥匙开关可使电扶梯上行或下行。上行→KMU吸合并自保→KMB吸合→SABO触点闭合→KB吸合→KMS吸合→KT得电,开始计时→时间到KT吸合→KMS释放→KMT吸合→主电动机MT正转。
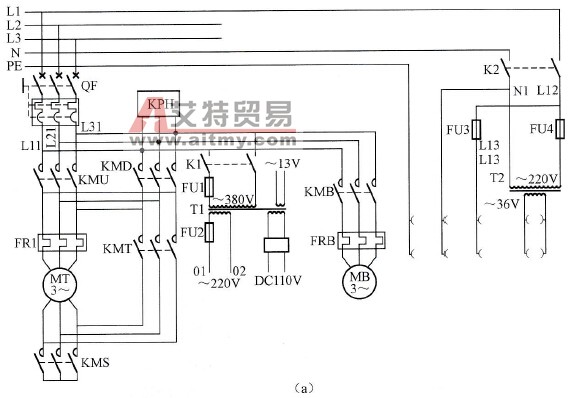
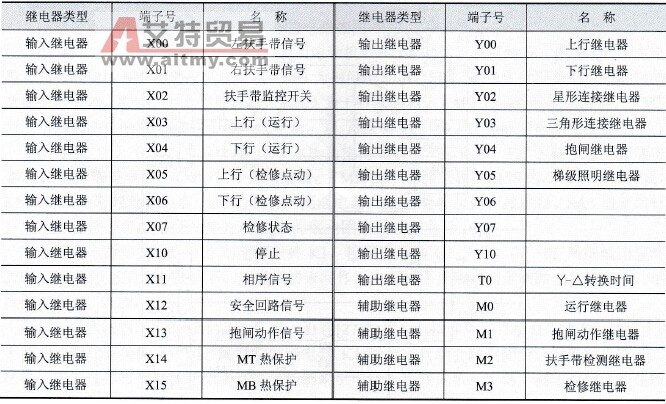
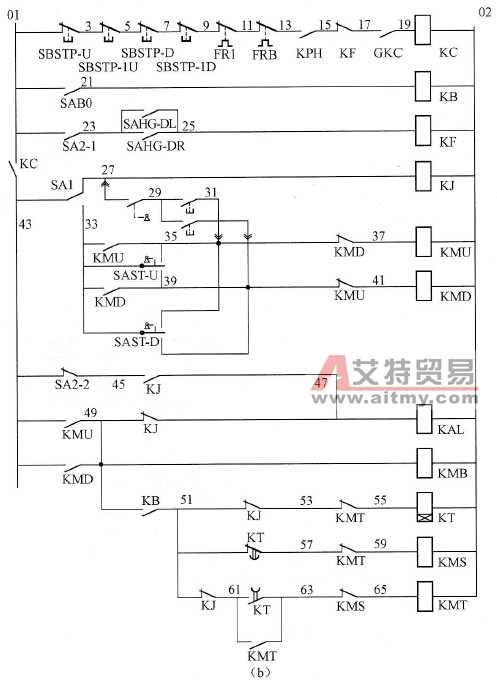 图4-32 电扶梯控制电路 (a)主电路;(b)控制电路 (3)扶手带监控。当SA2触点[01][23]接通时,扶梯两侧的扶手带处在监控状态。电扶梯左右两侧扶手带任一侧的带速低于正常速度时,检测继电器KF就会吸合,使其动断触点断开,运行继电器KC释放,扶梯停止运行。在扶手带监控置于“解除”位置时,若SA1打在“检修”位置时,KAL应吸合。 (4)停止。扶梯在运行状态中,按下电扶梯上下两侧的停止按钮时,运行继电器KC释放,扶梯就会停止运行;当热继电器动作或安全回路不正常时,运行继电器KC也会释放,扶梯停止运行。 二、PLC控制电路的设计 1.确定输入/输出点数 从上一节的分析中我们可以得到,PLC控制电扶梯所必需的输入信号有:四个停止按钮、两个热继电器信号FR1和FRB、相序继电器输出信号KPH、安全回路输出信号GKC、制动器动作检测开关SABO、扶手带带速检测器输出开关SAHG-DL和SAHG-DR、运行检修开关SA1、扶手带监控开关SA2、上行和下行起动信号。而PLC输出控制有:上/下行继电器KJU和KJD、星形/三角形继电器KJS和KJT、抱闸继电器KJB、梯级照明继电器KJL。 采用SL-FX2N-28MR-4AD-2DA嵌入式增强型PLC,PLC继电器的分配见表4-6。 表4-6 PLC继电器的分配
图4-32 电扶梯控制电路 (a)主电路;(b)控制电路 (3)扶手带监控。当SA2触点[01][23]接通时,扶梯两侧的扶手带处在监控状态。电扶梯左右两侧扶手带任一侧的带速低于正常速度时,检测继电器KF就会吸合,使其动断触点断开,运行继电器KC释放,扶梯停止运行。在扶手带监控置于“解除”位置时,若SA1打在“检修”位置时,KAL应吸合。 (4)停止。扶梯在运行状态中,按下电扶梯上下两侧的停止按钮时,运行继电器KC释放,扶梯就会停止运行;当热继电器动作或安全回路不正常时,运行继电器KC也会释放,扶梯停止运行。 二、PLC控制电路的设计 1.确定输入/输出点数 从上一节的分析中我们可以得到,PLC控制电扶梯所必需的输入信号有:四个停止按钮、两个热继电器信号FR1和FRB、相序继电器输出信号KPH、安全回路输出信号GKC、制动器动作检测开关SABO、扶手带带速检测器输出开关SAHG-DL和SAHG-DR、运行检修开关SA1、扶手带监控开关SA2、上行和下行起动信号。而PLC输出控制有:上/下行继电器KJU和KJD、星形/三角形继电器KJS和KJT、抱闸继电器KJB、梯级照明继电器KJL。 采用SL-FX2N-28MR-4AD-2DA嵌入式增强型PLC,PLC继电器的分配见表4-6。 表4-6 PLC继电器的分配
 2.画出PLC控制原理图 用PLC控制电扶梯的主线路我们仍旧使用图4-32 (a)所示线路,图中熔断器FU2移到图4-33 (a)中的FU1。改用PLC控制部分线路如图4-33所示。考虑到PLC输出继电器的容量和使用寿命,我们将PLC的输出通过一个中间继电器去驱动接触器,驱动控制线路如图4-33 (b)所示。
2.画出PLC控制原理图 用PLC控制电扶梯的主线路我们仍旧使用图4-32 (a)所示线路,图中熔断器FU2移到图4-33 (a)中的FU1。改用PLC控制部分线路如图4-33所示。考虑到PLC输出继电器的容量和使用寿命,我们将PLC的输出通过一个中间继电器去驱动接触器,驱动控制线路如图4-33 (b)所示。
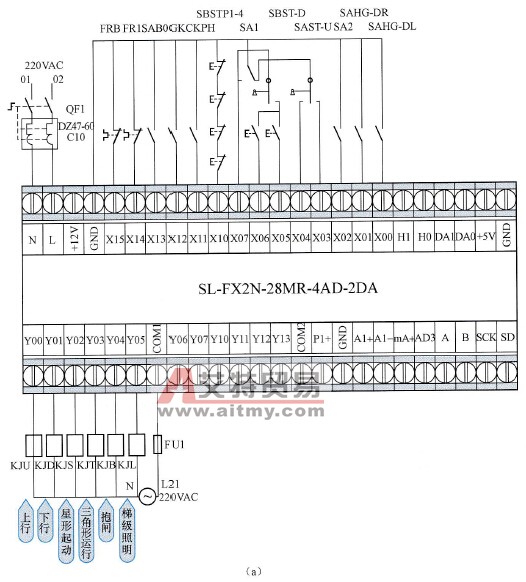
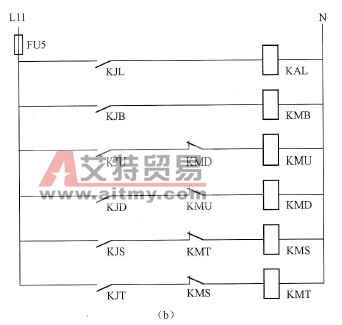 图4-33 改用PLC控制部分电路 (a) PLC控制电路;(b)中间继电器驱动电路 由于选用的PLC具有14个输入点,因此我们把两台电动机的热保护、四个停止按钮、相序继电器的输出信号都接入到PLC的输入端作为控制信号。还把检修状态的上/下行信号与运行状态的上/下行信号分开作为控制信号接入到PLC的输入端。如果PLC输入点有限的话,可以把这些点省去或合并。 三、应用程序设计 1.梯形图编制 PLC控制程序编制仍然采用经验设计法,依据图4-32 (b)的继电器一接触器控制线路演变而成。通过元件代号转换、符号图形转换、触点动合/动断修改、按编程规则整理四步后得到的电扶梯PLC控制系统的梯形图程序如图4-34所示。
图4-33 改用PLC控制部分电路 (a) PLC控制电路;(b)中间继电器驱动电路 由于选用的PLC具有14个输入点,因此我们把两台电动机的热保护、四个停止按钮、相序继电器的输出信号都接入到PLC的输入端作为控制信号。还把检修状态的上/下行信号与运行状态的上/下行信号分开作为控制信号接入到PLC的输入端。如果PLC输入点有限的话,可以把这些点省去或合并。 三、应用程序设计 1.梯形图编制 PLC控制程序编制仍然采用经验设计法,依据图4-32 (b)的继电器一接触器控制线路演变而成。通过元件代号转换、符号图形转换、触点动合/动断修改、按编程规则整理四步后得到的电扶梯PLC控制系统的梯形图程序如图4-34所示。
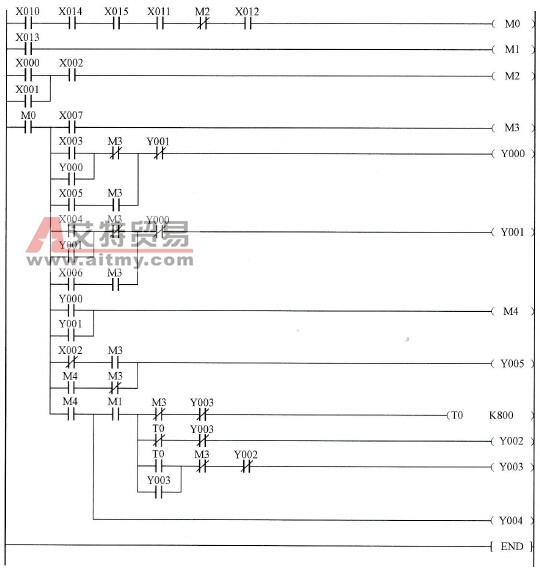 图4-34 电扶梯PLC控制梯形图 2.程序的录入 同样按照前面几节中介绍的方法,打开存放编程软件的文件夹“FXGPWIN”,找到程序文件“FXGPWIN.EXE”,用鼠标左键双击该文件的图标
图4-34 电扶梯PLC控制梯形图 2.程序的录入 同样按照前面几节中介绍的方法,打开存放编程软件的文件夹“FXGPWIN”,找到程序文件“FXGPWIN.EXE”,用鼠标左键双击该文件的图标![]() 。在初始界面上点“文件”菜单,在弹出的下拉菜单中选“新文件”;或直接点快捷按钮“新文件”。 桌面出现“PLC类型设置”对话框,在对话框中点“FX2N/FX2NC”,使其前面的单选框圆中出现一个黑点。设置完后点“确认”按钮。接着点“文件”下拉菜单,在菜单上选“另存为…”。在“File Save As”对话框中设置好存放文件的驱动器、文件夹和文件名,其中对话框中“驱动器”下的文本框中选驱动器、“文件夹”下的路径框中设定文件夹、“文件名”下面的文本框中输入文件名“电扶梯”(注意,后缀不能改),再点“确定”按钮;在弹出的“另存为”对话框中“文件题头名”下的文本框内输入“电扶梯”,单击“确定”按钮;把新建的文件另存为“电扶梯.PMW”。 紧接着在工作空间内,把图4-34中的梯形图逐一录入。点“转换”后再点保存按钮保存文件。录入完成的界面如图4-35所示。
。在初始界面上点“文件”菜单,在弹出的下拉菜单中选“新文件”;或直接点快捷按钮“新文件”。 桌面出现“PLC类型设置”对话框,在对话框中点“FX2N/FX2NC”,使其前面的单选框圆中出现一个黑点。设置完后点“确认”按钮。接着点“文件”下拉菜单,在菜单上选“另存为…”。在“File Save As”对话框中设置好存放文件的驱动器、文件夹和文件名,其中对话框中“驱动器”下的文本框中选驱动器、“文件夹”下的路径框中设定文件夹、“文件名”下面的文本框中输入文件名“电扶梯”(注意,后缀不能改),再点“确定”按钮;在弹出的“另存为”对话框中“文件题头名”下的文本框内输入“电扶梯”,单击“确定”按钮;把新建的文件另存为“电扶梯.PMW”。 紧接着在工作空间内,把图4-34中的梯形图逐一录入。点“转换”后再点保存按钮保存文件。录入完成的界面如图4-35所示。
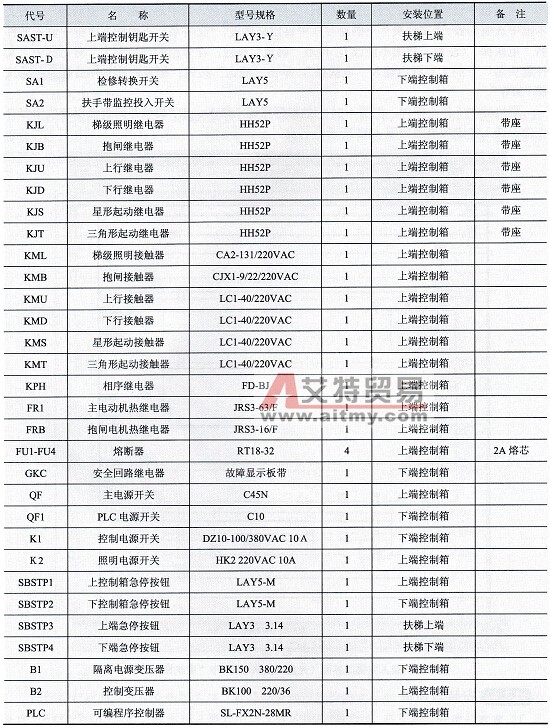
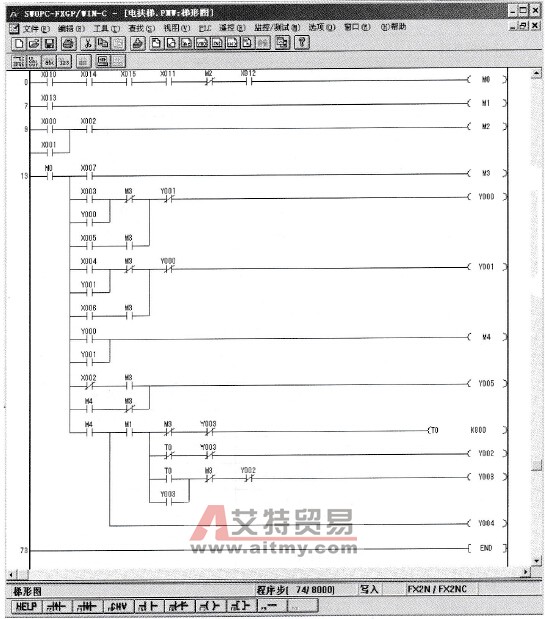 图4-35 录入完成的界面 四、安装与调试 1.电器选型和安装 电扶梯控制箱由两只组成,一只安装在扶梯的上端,另一只安装在扶梯的下端;分别称为上端控制箱和下端控制箱。电器元件的型号规格以及安装位置见表4-7。 表4-7 电器元件的型号规格以及安装位置
图4-35 录入完成的界面 四、安装与调试 1.电器选型和安装 电扶梯控制箱由两只组成,一只安装在扶梯的上端,另一只安装在扶梯的下端;分别称为上端控制箱和下端控制箱。电器元件的型号规格以及安装位置见表4-7。 表4-7 电器元件的型号规格以及安装位置
 2.程序下载 开始调试前,先不要把主电动机的接线连到主接触器上。 用通信线将电脑与PLC连接好后,给PLC上电并起动电脑。运行编程软件FXGPWIN,打开先前保存的应用程序文件“电扶梯.PMW”。打开PLC上的“运行/停止”开关盖板,将开关拨到“停止”位置;用鼠标点下拉菜单“PLC”选“传送”下面的“写出”。由于我们的程序较短,没有超过200行。因此与上一节相同,在“PC程序写入”范围选择对话框中我们选“范围设置”,并把“终止步”设置为“200”,以加快下载速度。设置完后,点“确认”按钮,软件开始向PLC写入程序。 3.运行监控 应用程序下载完毕后,把PLC上的“运行/停止”开关拨到“运行”位置;并将编程软件界面转为“监控”状态,即点下拉菜单“监控/测试”下的“开始监控”。待机状态的梯形图监控情况如图4-36所示。
2.程序下载 开始调试前,先不要把主电动机的接线连到主接触器上。 用通信线将电脑与PLC连接好后,给PLC上电并起动电脑。运行编程软件FXGPWIN,打开先前保存的应用程序文件“电扶梯.PMW”。打开PLC上的“运行/停止”开关盖板,将开关拨到“停止”位置;用鼠标点下拉菜单“PLC”选“传送”下面的“写出”。由于我们的程序较短,没有超过200行。因此与上一节相同,在“PC程序写入”范围选择对话框中我们选“范围设置”,并把“终止步”设置为“200”,以加快下载速度。设置完后,点“确认”按钮,软件开始向PLC写入程序。 3.运行监控 应用程序下载完毕后,把PLC上的“运行/停止”开关拨到“运行”位置;并将编程软件界面转为“监控”状态,即点下拉菜单“监控/测试”下的“开始监控”。待机状态的梯形图监控情况如图4-36所示。
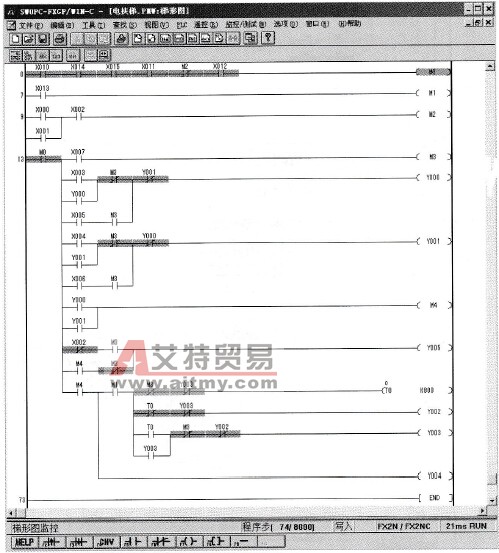 图4-36 电扶梯待机状态的梯形图 将SA1打在“检修”位置,SA2打在“监控解除”位置,KJL应动作吸合。其梯形图状态如图4-37所示。 打开检修柄钥匙开关,按上行或下行按钮,KJU或KJD、KJS、KJB动作吸合;松开按钮时,KJU或KJD、KJS、KJB释放。点动上行时的梯形图如图4-38所示。
图4-36 电扶梯待机状态的梯形图 将SA1打在“检修”位置,SA2打在“监控解除”位置,KJL应动作吸合。其梯形图状态如图4-37所示。 打开检修柄钥匙开关,按上行或下行按钮,KJU或KJD、KJS、KJB动作吸合;松开按钮时,KJU或KJD、KJS、KJB释放。点动上行时的梯形图如图4-38所示。
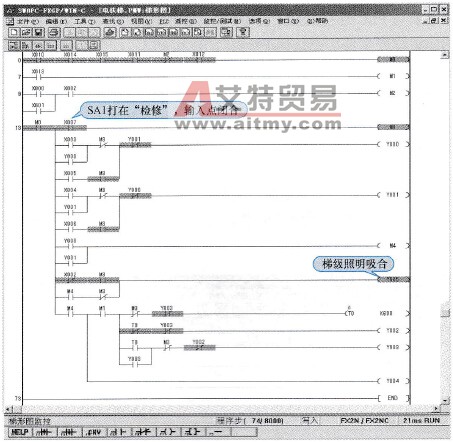 图4-37 检修时带速不监控状态梯形图
图4-37 检修时带速不监控状态梯形图
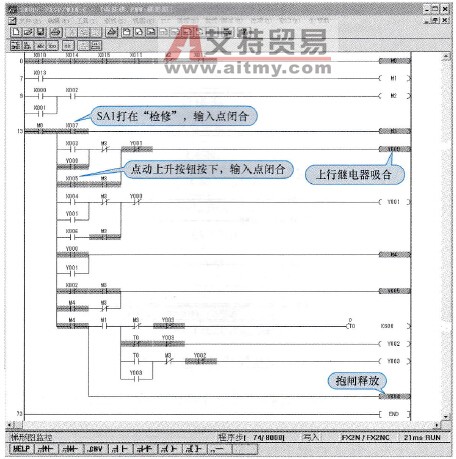 图4-38 检修时点动上行梯形图 将SA1打在“运行”位置,钥匙开关向上时,KJL、KJU、KJB、KJS动作吸合;8s后KJS释放,KJT吸合,完成Y-△转换。扶梯上行时的梯形图如图4-39所示。钥匙开关向下时,KJL、KJD、KJB、KJS动作吸合;8s后KJS释放,KJT吸合,完成Y-△转换。若需缩短转换时间,可修改时间继电器T0的参数K值,如图4-40所示。图中把原来延时值8s改为6s。
图4-38 检修时点动上行梯形图 将SA1打在“运行”位置,钥匙开关向上时,KJL、KJU、KJB、KJS动作吸合;8s后KJS释放,KJT吸合,完成Y-△转换。扶梯上行时的梯形图如图4-39所示。钥匙开关向下时,KJL、KJD、KJB、KJS动作吸合;8s后KJS释放,KJT吸合,完成Y-△转换。若需缩短转换时间,可修改时间继电器T0的参数K值,如图4-40所示。图中把原来延时值8s改为6s。
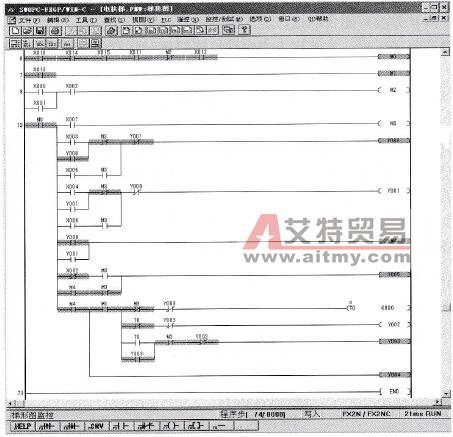 图4-39 扶梯上行时的梯形图
图4-39 扶梯上行时的梯形图
 图4-40 修改T0的参数K值 SA2打在“解除”位置,SAHG-DL、SAHG-DR通断都不起作用;SA2打在“投入”位置,SAHG-DL、SAHG-DR中只要有一个闭合,扶梯就应使运行中的扶梯立即停止或无法起动。 按下停止按钮、热继电器动作、相序继电器释放、安全回路输出继电器未吸合都应使运行中的扶梯立即停止或无法起动。 抱闸动作检测开关没有闭合的话,星形继电器不会吸合。 上面各种测试都完成后,才能接上主电动机连线核对运行方向,并进行试运行。
图4-40 修改T0的参数K值 SA2打在“解除”位置,SAHG-DL、SAHG-DR通断都不起作用;SA2打在“投入”位置,SAHG-DL、SAHG-DR中只要有一个闭合,扶梯就应使运行中的扶梯立即停止或无法起动。 按下停止按钮、热继电器动作、相序继电器释放、安全回路输出继电器未吸合都应使运行中的扶梯立即停止或无法起动。 抱闸动作检测开关没有闭合的话,星形继电器不会吸合。 上面各种测试都完成后,才能接上主电动机连线核对运行方向,并进行试运行。

 PLC编程的基本规则
PLC编程的基本规则





