

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介运动控制对象为 BF 型自动换挡器,其抽象出的该换挡器档位如图 10-2 所示,图 10-2 中字母 A 、 B 、 C 、 D 、 E 、 K 、 F 、 G 、 H 、 M 、 I 表示各个转折位置。 在整个运动过程中,要求
运动控制对象为BF型自动换挡器,其抽象出的该换挡器档位如图10-2所示,图10-2中字母A、B、C、D、E、K、F、G、H、M、I表示各个转折位置。
在整个运动过程中,要求A→B→C→D→E→K→F→G→H→M→I后返回。其中,向下走时,在D→E和F→H区间要压下换挡器杆;向上走时,在D→E和F→H区间也要做压下换挡器杆的动作。
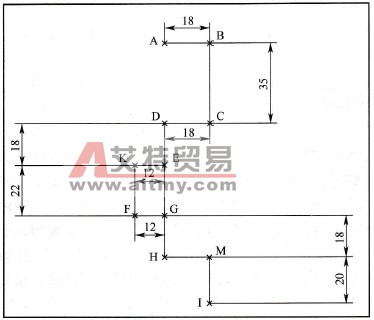
图10-2 BF自动换挡器抽象轨迹
为了控制方便,设定水平方向为X轴,垂直方向为Y轴。
上位机设定如下参数(X轴)。
A ↔B: 18mm。
C ↔D: 18mm。
E ↔K:12mm。
F ↔G: 12mm。
H ↔M: 18mm。
伺服按如下距离走。
第一步,B位置启动:正向走A↔B:18mm。
第二步,确定C位置走完,D位置启动:反向走C↔D:18mm。
第三步,确定E位置走完,K位置启动:反向走D↔E:20mm。
第四步,确定F位置走完,G位置启动:正向走F↔G:12mm。
第五步,确定H位置走完,M位置启动:正向走H↔M:18mm。
上位机设定如下参数(Y轴)。
y轴方向在换挡器轨迹周期中与X轴不同,一个来回,方向分别为正和负,PLC内不需计算。
伺服按如下距离走。
第一步,确定B位置走完,C位置启动:正向走B↔C:35mm。
第二步,确定D位置走完,E位置启动:反向走C↔D:18mm。
第三步,确定K位置走完,F位置启动:反向走E↔K:12mm。
第四步,确定G位置走完,H位置启动:正向走F↔G:12mm。
第五步,确定M位置走完,I位置启动:正向走H↔M:18mm。

 PLC编程的基本规则
PLC编程的基本规则





