

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 .确定设计任务书 (1) 控制要求 机械手模型及动作示意图如图 7-32 所示,共 6 个动作,分 3 组,即上升/下降,左移/右移和放松/夹紧。机械手的全部动作由气缸驱动,而气缸由相
1.确定设计任务书 (1)控制要求 机械手模型及动作示意图如图7-32所示,共6个动作,分3组,即上升/下降,左移/右移和放松/夹紧。机械手的全部动作由气缸驱动,而气缸由相应的电磁阀控制。其中,上升/下降和左移/右移分别由双线圈的两位电磁阀控制。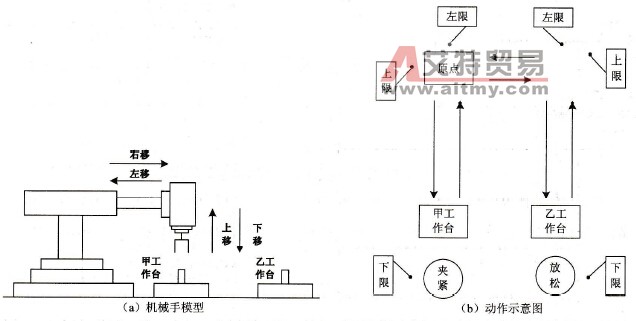 图7-32 机械手模型及动作示意图 当机械手右移到位并准备下降时,为了确保安全,必须在甲工作台上无工件时才允许机械手下降。机械手的工作过程示意如下。
图7-32 机械手模型及动作示意图 当机械手右移到位并准备下降时,为了确保安全,必须在甲工作台上无工件时才允许机械手下降。机械手的工作过程示意如下。
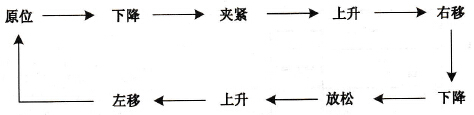 从原点开始,按下启动按钮,下降电磁阀通电,机械手下降,下降到底时,碰到下限位开关,下降电磁阀断电,下降停止;同时接通夹紧电磁阀,机械手夹紧。夹紧后,上升电磁阀通电,机械手上升。上升到顶时,碰到上限位开关,上升电磁阀断电,上升停止;同时接通右移电磁阀,机械手右移。右移到位时,碰到右限位开关,右移电磁阀断电,右移停止。若此时乙工作台上无工件,则光电开关接通,下降电磁阀通电,机械手下降。下降到底时,碰到下限位开关,下降电磁阀断电,下降停止;同时夹紧电磁阀断电,机械手放松。放松后,上升电磁阀通电,机械手上升。上升到顶时,碰到上限位开关,上升电磁阀断电,上升停止;同时接通左移电磁阀,机械手左移。左移到原点时,碰到左限位开关,左移电磁阀断电,左移停止。至此,机械手经过九步动作完成一个周期的工作。机械手的每次循环动作均从原点开始。 (2)操作方式 机械手的操作方式分为手动操作方式和自动操作方式。自动操作方式又分为单步操作、半自动操作、全自动操作。 手动操作:用各个控制按钮的点动来执行相对应的操作。例如,按一下下降按钮,机械手执行下降操作,按一下左移按钮,机械手执行左移操作。 单步操作:每按一次启动按钮,机械手完成一步动作后自动停止。 半自动操作:机械手从原点开始,按一下启动按钮,机械手自动完成一个周期的动作后停止。 全自动操作:机械手从原点开始,按一下启动按钮,机械手的动作将自动地、连续不断地周期性循环。在工作中若按一下停止按钮,机械手将继续完成一个周期的动作后,回到原点自动停止。 2.确定外围I/O设备 (1)输入设备:11个按钮,5个行程开关。 (2)输出设备:5个继电器控制机械手的动作,一个原点指示灯。 3.选定PLC的型号 选用的PLC是西门子公司的S7-200系列小型PLC-CPU224。 4.编制编程元件地址分配表 编程元件地址分配见表7-16。 表7-16 编程元件地址分配表
从原点开始,按下启动按钮,下降电磁阀通电,机械手下降,下降到底时,碰到下限位开关,下降电磁阀断电,下降停止;同时接通夹紧电磁阀,机械手夹紧。夹紧后,上升电磁阀通电,机械手上升。上升到顶时,碰到上限位开关,上升电磁阀断电,上升停止;同时接通右移电磁阀,机械手右移。右移到位时,碰到右限位开关,右移电磁阀断电,右移停止。若此时乙工作台上无工件,则光电开关接通,下降电磁阀通电,机械手下降。下降到底时,碰到下限位开关,下降电磁阀断电,下降停止;同时夹紧电磁阀断电,机械手放松。放松后,上升电磁阀通电,机械手上升。上升到顶时,碰到上限位开关,上升电磁阀断电,上升停止;同时接通左移电磁阀,机械手左移。左移到原点时,碰到左限位开关,左移电磁阀断电,左移停止。至此,机械手经过九步动作完成一个周期的工作。机械手的每次循环动作均从原点开始。 (2)操作方式 机械手的操作方式分为手动操作方式和自动操作方式。自动操作方式又分为单步操作、半自动操作、全自动操作。 手动操作:用各个控制按钮的点动来执行相对应的操作。例如,按一下下降按钮,机械手执行下降操作,按一下左移按钮,机械手执行左移操作。 单步操作:每按一次启动按钮,机械手完成一步动作后自动停止。 半自动操作:机械手从原点开始,按一下启动按钮,机械手自动完成一个周期的动作后停止。 全自动操作:机械手从原点开始,按一下启动按钮,机械手的动作将自动地、连续不断地周期性循环。在工作中若按一下停止按钮,机械手将继续完成一个周期的动作后,回到原点自动停止。 2.确定外围I/O设备 (1)输入设备:11个按钮,5个行程开关。 (2)输出设备:5个继电器控制机械手的动作,一个原点指示灯。 3.选定PLC的型号 选用的PLC是西门子公司的S7-200系列小型PLC-CPU224。 4.编制编程元件地址分配表 编程元件地址分配见表7-16。 表7-16 编程元件地址分配表 5.PLC的外部接线图 本系统的工作电源采用24V DC汇点输入,24V DC输出的形式,因此PLC的外部接线图如图7-33所示。
5.PLC的外部接线图 本系统的工作电源采用24V DC汇点输入,24V DC输出的形式,因此PLC的外部接线图如图7-33所示。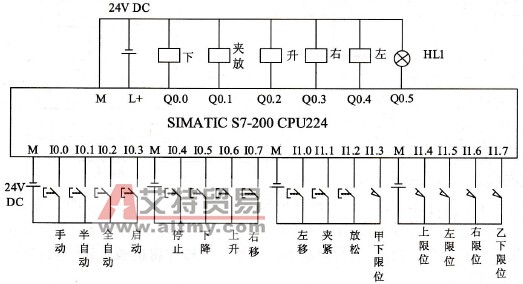 图7-33 PLC外部接线图 6.程序流程图 机械手分为手动控制与自动控制,而自动控制又分为三种,所以本设计采用主程序调用子程序的方式,这样可以使程序结构更具条理性。主程序流程图如图7-34所示。自动控制中的全自动控制与半自动控制的流程图如图7-35所示,二者的区别在于全自动化控制是连续工作,而半自动控制停在原点,等待下次控制作用。单步控制与全自动和手动控制类似,只是每步动作都需按一次启动按钮,在此不编程其代码。
图7-33 PLC外部接线图 6.程序流程图 机械手分为手动控制与自动控制,而自动控制又分为三种,所以本设计采用主程序调用子程序的方式,这样可以使程序结构更具条理性。主程序流程图如图7-34所示。自动控制中的全自动控制与半自动控制的流程图如图7-35所示,二者的区别在于全自动化控制是连续工作,而半自动控制停在原点,等待下次控制作用。单步控制与全自动和手动控制类似,只是每步动作都需按一次启动按钮,在此不编程其代码。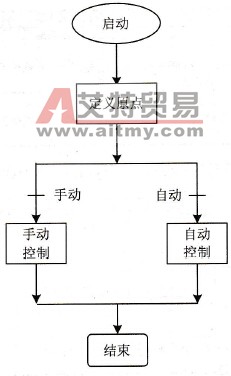 图7-34 机械手控制总体流程图
图7-34 机械手控制总体流程图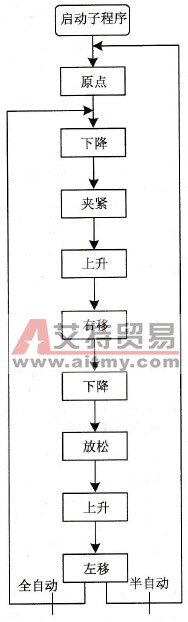 图7-35 机械手自动控制流程图 7.程序设计 程序设计采用顺序控制方法,主程序与各子程序分别见表7-17~7-20。在运行中,如按停止按钮,机械手的动作执行完当前一个周期后,回到原点自动停止。在运行中,若PLC掉电,机械手停止动作。PLC重新启动后,先用手动操作将机械手移回原点后,再按启动按钮开始新的操作。 表7-17 机械手控制主程序
图7-35 机械手自动控制流程图 7.程序设计 程序设计采用顺序控制方法,主程序与各子程序分别见表7-17~7-20。在运行中,如按停止按钮,机械手的动作执行完当前一个周期后,回到原点自动停止。在运行中,若PLC掉电,机械手停止动作。PLC重新启动后,先用手动操作将机械手移回原点后,再按启动按钮开始新的操作。 表7-17 机械手控制主程序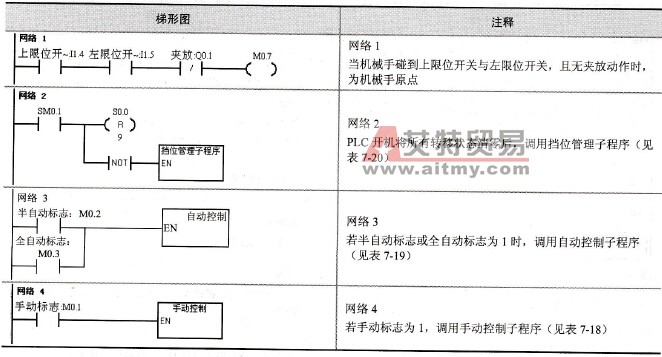 表7-18 手动控制子程序
表7-18 手动控制子程序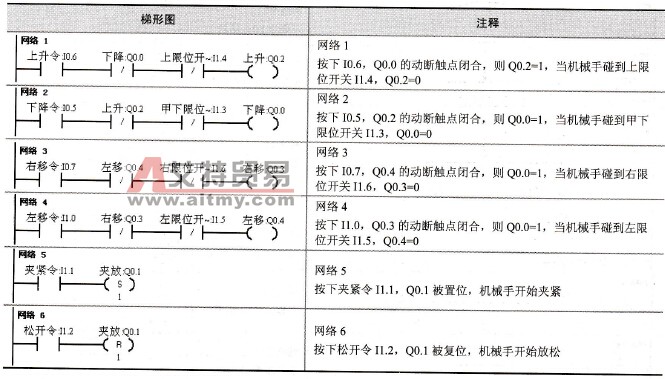 表7-19 自动控制子程序
表7-19 自动控制子程序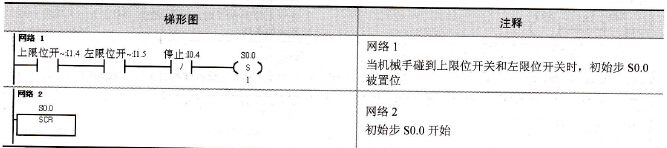
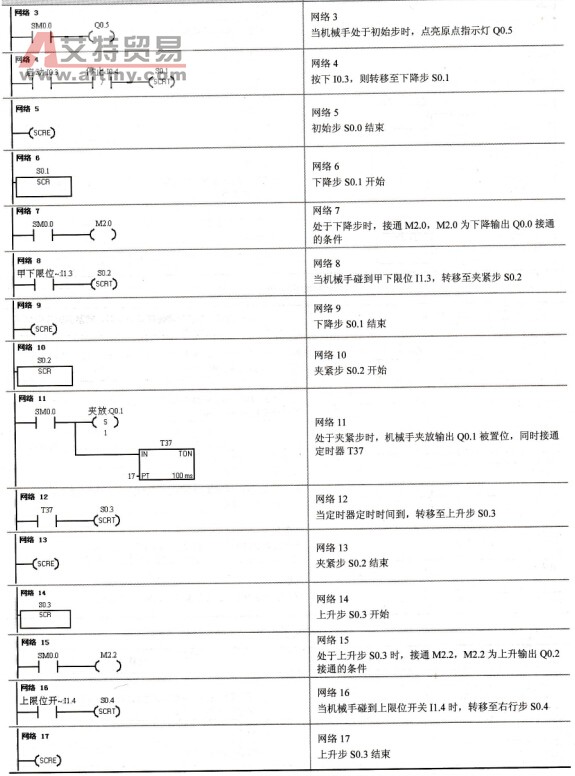
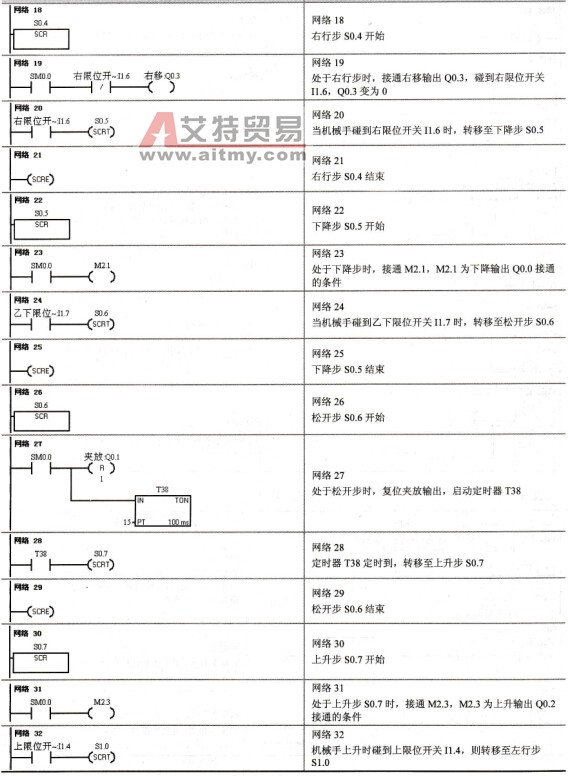
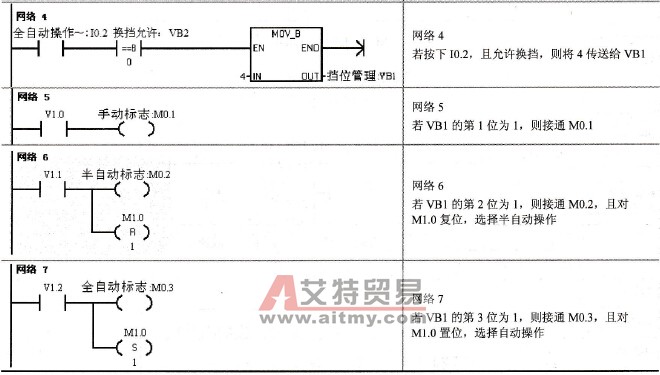
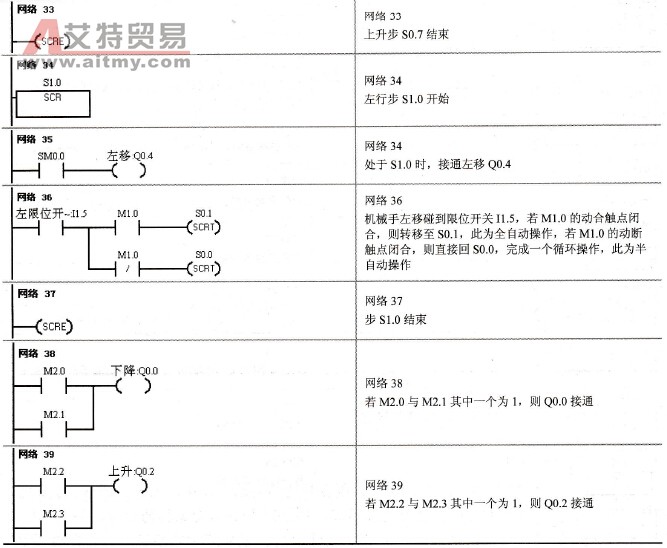 表7-20 挡位管理子程序
表7-20 挡位管理子程序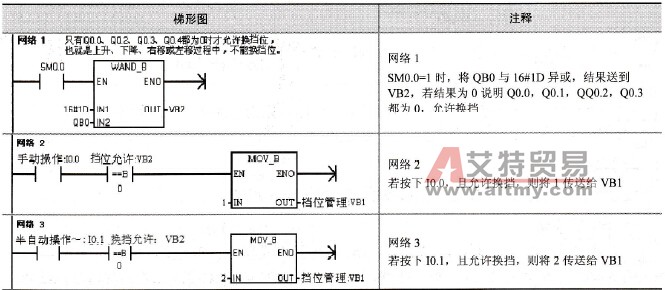

 PLC编程的基本规则
PLC编程的基本规则





