

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介用 PLC 实现以开关量为主的自动控制是非常方便的。也就是说 PLC 能方便地根据工艺要求,按照逻辑运算、顺序操作、定时和计数等规则控制执行机构按预定程序动作,如控制继电器接通
用PLC实现以开关量为主的自动控制是非常方便的。也就是说PLC能方便地根据工艺要求,按照逻辑运算、顺序操作、定时和计数等规则控制执行机构按预定程序动作,如控制继电器接通或断开、电磁阀打开或关闭、电动机转动或停止等。然而,早期PLC的模拟量处理,特别是闭环控制功能较弱。为了适应工业生产自动控制的需要,中型以上PLC大都开发了能实现闭环控制功能的模块。 1.PLC实现闭环控制的方法 PLC实现闭环控制的方法各不相同,一般来说可分为两大类。 一类称为“完全软件实现法”,它主要是利用所开发的模拟量输入与输出模块来构成闭环控制系统。在软件上开发了比较完善的实现各种控制算法的应用软件。也可由用户自行根据需要编制。采用这一类办法的有美国GE公司和日本三菱公司等。如三菱公司在A系列PLC上配置多通道A/D、D/A转换模块A616,可用于实现建筑物的温度调节,另外三菱公司在F系列上配置的F2-6A-E模拟量输入/输出模块有四路模拟量输入,二路模拟量输出,也可构成闭环控制系统。 另一类称为“硬、软件结合法”,它专门开发可以实现闭环控制的硬件模块,并为它配有适应各种控制方案的软件功能块,共同实现闭环控制。采用这一类办法的有西门子公司、美国AB公司等的PLC。 为适应自动控制的需要,开发出不同用途的闭环控制模块,如三菱公司A系列PLC的定位控制模块AD71、AOJ2-D71、AD72,适用于诸如伺服马达系统,进行闭环精密定位控制;西门子公司S系列PLC开发有专用的闭环控制模块,如温度控制模块、位置控制模块和通用闭环控制模块。 下面介绍西门子公司的通用闭环控制模块的结构原理。 2.通用闭环控制模块的硬件结构 两门子公司的通用闭环控制模块可应用于快速闭环控制系统中,当插入不同的软件功能模块就能形成不同的控制结构。通常安装于PLC的I/O框架上,通过其自己的接口一方面与PLC的系统总线相连,另一方面与被控对象相连,在不占用PLC的CPU资源情况下,可并行管理8个闭环回路。 通用闭环控制模块的硬件结构框图如图2.14所示,整个模块可分为两大部分:上部为处理器部分,下部为模拟与脉冲输入部分。两部分通过电缆相连。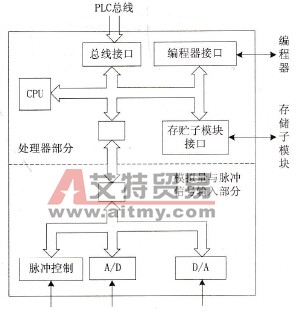 图2.14 通用闭环控制模块的硬件结构框图 (1)处理器部分 本模块是智能模块处理器部分,采用80186作微处理器,用它来实现各种控制算法的计算及各种控制功能的实现。图中的总线接口用于与PLC的系统总线相连,并通过它与PLC的CPU进行信息交换。编程器接口与编程器相连,实现对模块的编程和监控。系统内尚有存储器子模块接口。存储子模块中包括16KB EPROM和4KB EEPROM,EPROM中存放与控制结构相应的系统软件,EEPROM中存放系统的结构数据。不同的控制结构需要不同的系统软件,由插入模块内不同的存储子模块内容来确定。 (2)模拟与脉冲输入部分 模拟部分包括:模拟量输入通道(A/D),输入通道数为8路、12位、输入信号范围为±10V;模量输出通道( D/A),输出通道数亦为8路、12位,输出信号范围为±10V,有短路保护。另外还有脉冲输入部分,计数范围为0~32767,码盘电源电压5V,最大输入频率为500kHz。通过上述3个接口可与实际生产过程相连。 3.控制结构的类型与组成 西门子公司的通用闭环控制模块插入不同的存储子模块就能实现不同的控制结构,有3种控制结构:标准控制结构、电机拖动控制结构和带自校正的电机拖动控制结构。 (1)标准控制结构 标准控制结构用于单闭环控制系统。这种控制结构的示意图如图2.15所示,图中绘出了闭环控制模块与外部生产过程的关系。标准控制结构具有P(比例)、PI(比例、积分)、PD(比例、微分)和PID(比例、积分、微分)等控制功能。主要用于温度控制、压力控制和流量控制等生产过程。
图2.14 通用闭环控制模块的硬件结构框图 (1)处理器部分 本模块是智能模块处理器部分,采用80186作微处理器,用它来实现各种控制算法的计算及各种控制功能的实现。图中的总线接口用于与PLC的系统总线相连,并通过它与PLC的CPU进行信息交换。编程器接口与编程器相连,实现对模块的编程和监控。系统内尚有存储器子模块接口。存储子模块中包括16KB EPROM和4KB EEPROM,EPROM中存放与控制结构相应的系统软件,EEPROM中存放系统的结构数据。不同的控制结构需要不同的系统软件,由插入模块内不同的存储子模块内容来确定。 (2)模拟与脉冲输入部分 模拟部分包括:模拟量输入通道(A/D),输入通道数为8路、12位、输入信号范围为±10V;模量输出通道( D/A),输出通道数亦为8路、12位,输出信号范围为±10V,有短路保护。另外还有脉冲输入部分,计数范围为0~32767,码盘电源电压5V,最大输入频率为500kHz。通过上述3个接口可与实际生产过程相连。 3.控制结构的类型与组成 西门子公司的通用闭环控制模块插入不同的存储子模块就能实现不同的控制结构,有3种控制结构:标准控制结构、电机拖动控制结构和带自校正的电机拖动控制结构。 (1)标准控制结构 标准控制结构用于单闭环控制系统。这种控制结构的示意图如图2.15所示,图中绘出了闭环控制模块与外部生产过程的关系。标准控制结构具有P(比例)、PI(比例、积分)、PD(比例、微分)和PID(比例、积分、微分)等控制功能。主要用于温度控制、压力控制和流量控制等生产过程。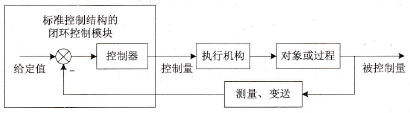 图2.15 标准控制结构的系统示意图 (2)电机拖动控制结构 图2.16为电机拖动控制结构系统示意图。
图2.15 标准控制结构的系统示意图 (2)电机拖动控制结构 图2.16为电机拖动控制结构系统示意图。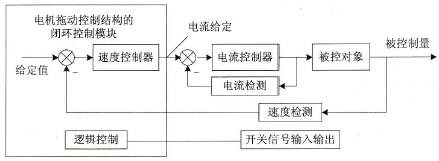 图2.16 电机拖动控制结构系统示意图 由上图看出闭环控制模块实现速度控制和逻辑控制。电流控制器中包括了电机控制和SCR供电部分,这部分在模块外,需用户另行设计。 由速度控制器和电流控制器共同组成双闭环控制系统。其中速度控制器是数字控制器,电流控制器为模拟控制器,两者结合使用可以满足快速系统的需要。逻辑控制部分主要实现关系的联锁、显示等功能。实际转速值(速度反馈)来自码盘的计数脉冲。 速度控制器的输出也就是电流给定值,通过模拟量输出通道输出。 (3)带有自校正的电机拖动控制系统 带有自校正的电机拖动控制结构对于直流电机速度控制系统具有自校正特性,用户可以确定最优控制参数,得到一个动态特性好的控制器。 自校正电机拖动动控制结构是在电机拖动控制结构的基础上发展起来的。它们之间有许多相同之处,但增加了一个“自校正分支”,它是实现自校正的核心。它在控制器输出和实际值输入之间加入了控制系统辨识和参数计算的软件功能。在自校正分支中定义给定值的每步变化,而且系统的特征将取决于每步的响应。考虑到用户给出的极限值,采用特殊的搜索方法来计算最优控制参数。 以上概略介绍了西门子公司通用闭环控制模块的3种控制结构。闭环控制模块工作时要与PLC的CPU交换信息。在处理闭环控制时,CPU可调用相应的软件功能块,写入和读出有关数据与参数,实现不同的控制结构的功能。
图2.16 电机拖动控制结构系统示意图 由上图看出闭环控制模块实现速度控制和逻辑控制。电流控制器中包括了电机控制和SCR供电部分,这部分在模块外,需用户另行设计。 由速度控制器和电流控制器共同组成双闭环控制系统。其中速度控制器是数字控制器,电流控制器为模拟控制器,两者结合使用可以满足快速系统的需要。逻辑控制部分主要实现关系的联锁、显示等功能。实际转速值(速度反馈)来自码盘的计数脉冲。 速度控制器的输出也就是电流给定值,通过模拟量输出通道输出。 (3)带有自校正的电机拖动控制系统 带有自校正的电机拖动控制结构对于直流电机速度控制系统具有自校正特性,用户可以确定最优控制参数,得到一个动态特性好的控制器。 自校正电机拖动动控制结构是在电机拖动控制结构的基础上发展起来的。它们之间有许多相同之处,但增加了一个“自校正分支”,它是实现自校正的核心。它在控制器输出和实际值输入之间加入了控制系统辨识和参数计算的软件功能。在自校正分支中定义给定值的每步变化,而且系统的特征将取决于每步的响应。考虑到用户给出的极限值,采用特殊的搜索方法来计算最优控制参数。 以上概略介绍了西门子公司通用闭环控制模块的3种控制结构。闭环控制模块工作时要与PLC的CPU交换信息。在处理闭环控制时,CPU可调用相应的软件功能块,写入和读出有关数据与参数,实现不同的控制结构的功能。

 PLC编程的基本规则
PLC编程的基本规则





