

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 .指令说明 PID 指令说明如下: 2 . PID 控制回路参数表 PID 运算由 P (比例)、 I (积分)和 D (微分)三项运算组成, PID 运算公式如下: Mn=[Kc(SPn-PVn)]+[Kc(Ts/rTI(SPn-PVn)+Mx] +[Kc ( TD
1.指令说明 PID指令说明如下: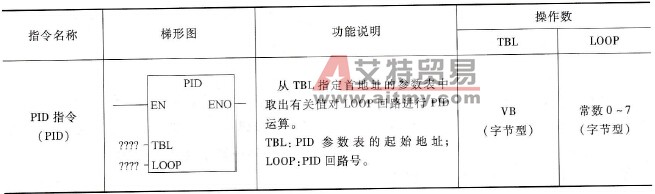 2.PID控制回路参数表 PID运算由P(比例)、I(积分)和D(微分)三项运算组成,PID运算公式如下: Mn=[Kc(SPn-PVn)]+[Kc(Ts/rTI(SPn-PVn)+Mx] +[Kc(TD/Ts)(SPn-PVn)] 在上式中,Mn为PID运算输出值,[Kc(SPn-PVn)]为比例运算项, [Kc(Ts/TI)(SPn-PVn)+Mx]为积分运算项,[Kc(TD/Ts)(SPn-PVn)]为微分运算项。 要进行PID运算,需先在PID控制回路参数表中设置运算公式中的变量值。PID控制回路参数表见表5-22。在表中,过程变量(PVn)相当于图5-51中的反馈信号,设定值( SPn)相当于图5-51中的给定信号,输出值(Mn)为PID运算结果值,相当于图5-51中的控制信号,如果将过程变量(PVn)值存放在VD200双字单元,那么设定值(SPn)、输出值(Mn)则要分别存放在VD204、VD208单元。 表5-22 PID控制回路参数表
2.PID控制回路参数表 PID运算由P(比例)、I(积分)和D(微分)三项运算组成,PID运算公式如下: Mn=[Kc(SPn-PVn)]+[Kc(Ts/rTI(SPn-PVn)+Mx] +[Kc(TD/Ts)(SPn-PVn)] 在上式中,Mn为PID运算输出值,[Kc(SPn-PVn)]为比例运算项, [Kc(Ts/TI)(SPn-PVn)+Mx]为积分运算项,[Kc(TD/Ts)(SPn-PVn)]为微分运算项。 要进行PID运算,需先在PID控制回路参数表中设置运算公式中的变量值。PID控制回路参数表见表5-22。在表中,过程变量(PVn)相当于图5-51中的反馈信号,设定值( SPn)相当于图5-51中的给定信号,输出值(Mn)为PID运算结果值,相当于图5-51中的控制信号,如果将过程变量(PVn)值存放在VD200双字单元,那么设定值(SPn)、输出值(Mn)则要分别存放在VD204、VD208单元。 表5-22 PID控制回路参数表 3.PID运算项的选择 PID运算由P(比例)、I(积分)和D(微分)三项运算组成,可以根据需要选择其中的一项或两项运算。 1)如果不需要积分运算,应在参数表中将积分时间(Ti)设为无限大,这样(Ts/TI)值接近0,虽然没有积分运算,但由于有上一次的积分值Mx,积分项的值也不为0。 2)如果不需要微分运算,应将微分时间(TD)设为0.0。 3)如果不需要比例运算,但需要积分或微分回路,可以把增益(Kc)设为0.0,系统会在计算积分项和微分项时,把增益(Kc)当做1.0看待。 4.PID输入量的转换与标准化 PID控制电路有两个输入量:设定值和过程变量。设定值通常是人为设定的参照值,如设置的水压值;过程变量值来自受控对象,如压力传感器检测到的水压值。由于现实中的设定值和过程变量值的大小、范围和工程单位可能不一样,在执行PID指令进行PID运算前,必须先把输入量转换成标准的浮点型数值。 PID输入量的转换与标准化过程如下: 1)将输入量从16位整数值转换成32位实数(浮点数)。该转换程序如图5-52所示。
3.PID运算项的选择 PID运算由P(比例)、I(积分)和D(微分)三项运算组成,可以根据需要选择其中的一项或两项运算。 1)如果不需要积分运算,应在参数表中将积分时间(Ti)设为无限大,这样(Ts/TI)值接近0,虽然没有积分运算,但由于有上一次的积分值Mx,积分项的值也不为0。 2)如果不需要微分运算,应将微分时间(TD)设为0.0。 3)如果不需要比例运算,但需要积分或微分回路,可以把增益(Kc)设为0.0,系统会在计算积分项和微分项时,把增益(Kc)当做1.0看待。 4.PID输入量的转换与标准化 PID控制电路有两个输入量:设定值和过程变量。设定值通常是人为设定的参照值,如设置的水压值;过程变量值来自受控对象,如压力传感器检测到的水压值。由于现实中的设定值和过程变量值的大小、范围和工程单位可能不一样,在执行PID指令进行PID运算前,必须先把输入量转换成标准的浮点型数值。 PID输入量的转换与标准化过程如下: 1)将输入量从16位整数值转换成32位实数(浮点数)。该转换程序如图5-52所示。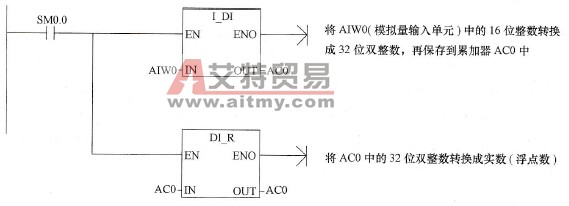 图5-52 16位整数值转换成32位实数 2)将实数转换成0.0~1.0之间的标准化数值。转换表达式为:输入量的标准化值=输入量的实数值/跨度+偏移量。跨度值通常取32000(针对0~ 32000单极性数值)或64000(针对- 32000~ 32000双极性数值);偏移量取0.0(单极性数值)或0.5(双极性数值)。该转换程序如图5-53所示:
图5-52 16位整数值转换成32位实数 2)将实数转换成0.0~1.0之间的标准化数值。转换表达式为:输入量的标准化值=输入量的实数值/跨度+偏移量。跨度值通常取32000(针对0~ 32000单极性数值)或64000(针对- 32000~ 32000双极性数值);偏移量取0.0(单极性数值)或0.5(双极性数值)。该转换程序如图5-53所示: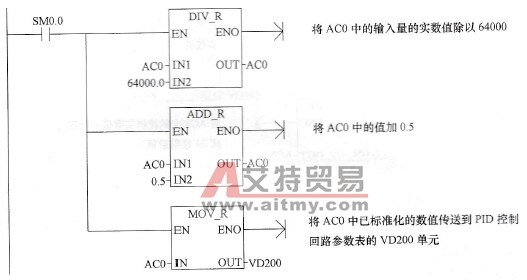 图5-53 实数转换成0.0~1.0之间的标准化数值 5.PID输出量的转换 在PID运算前,需要将实际输入量转换成0.0~1.0之间的标准值,然后进行PID运算,PID运算后得到的输出量也是0.0~1.0之间的标准值,这样的数值无法直接驱动PID的控制对象,因此需要将PID运算输出的0.0~1.0标准值按比例转换成16位整数,再送到模拟量输出单元,通过模拟量输出端子输出。 PID输出量的转换表达式为 PID输出量整数值=(PID运算输出量标准值-偏移量)×跨度 PID输出量的转换程序如图5-54所示。
图5-53 实数转换成0.0~1.0之间的标准化数值 5.PID输出量的转换 在PID运算前,需要将实际输入量转换成0.0~1.0之间的标准值,然后进行PID运算,PID运算后得到的输出量也是0.0~1.0之间的标准值,这样的数值无法直接驱动PID的控制对象,因此需要将PID运算输出的0.0~1.0标准值按比例转换成16位整数,再送到模拟量输出单元,通过模拟量输出端子输出。 PID输出量的转换表达式为 PID输出量整数值=(PID运算输出量标准值-偏移量)×跨度 PID输出量的转换程序如图5-54所示。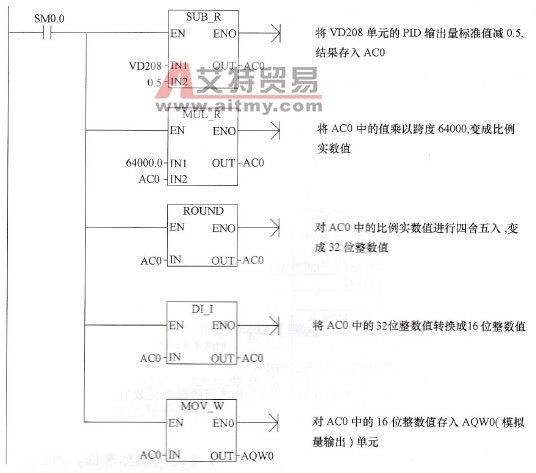 图5-54 PID输出量的转换程序
图5-54 PID输出量的转换程序

 PLC编程的基本规则
PLC编程的基本规则





