

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介SFB42 CONT_S (步进控制器)用于二进制数控数值输出信号控制积分执行机构。通过参数设置可以激活或取消 PI 步进控制器的子功能,以使控制器与过程匹配。通过参数设置工具,可以很
SFB42“CONT_S”(步进控制器)用于二进制数控数值输出信号控制积分执行机构。通过参数设置可以激活或取消PI步进控制器的子功能,以使控制器与过程匹配。通过参数设置工具,可以很容易地做到这一点。 可以使用该控制器作为单独的PI恒值控制器,或在辅助控制循环中作为级联控制器或者比例控制器使用,但是不能用做主控制器。控制器的功能根据采样控制器的PI控制算法实现,由模拟执行信号生成二进制输出信号。图8-20为步进控制系统实例。 电动调节阀是典型的积分型执行机构,它的两个开关量输入脉冲信号用来控制电动阀的伺服电动机的正转和反转,使阀的开度增大或减小。图8-20中的内环是一个典型的位置随动系统,作用是使阀门的开度正比于输入值,即PI控制器的输出值。图中的三级元件具有带滞环的双向继电器非线性特性,作用是将小闭环的误差信号转换为两个开关量信号,通过伺服电机来控制调节阀的开度。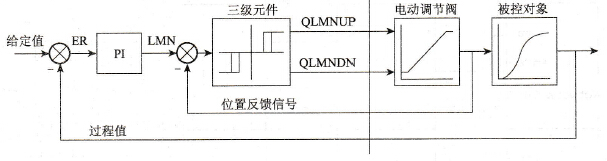 图8-20 有位置反馈信号的步进控制系统 由于控制器不使用任何位置反馈信号,内部计算的受控变量将不能准确地匹配信号控制元件的位置。如果受控变量(ER*GAIN)为负值,应进行调整。然后调节器置位输出端QLMNDN(受控量信号低),直到LMNR_LS(位置反馈信号下限)被置位。 控制器还可以在一个控制器级联中用做一个辅助控制器(第二个执行器)。设定点输入端“SP_INT”用于赋值控制元件的位置。在这种情况下,实际数值输入和参数“TI(积分时间)”必须设置为“0”。如通过电控阀瓣控制温度,即是借助二进制脉冲数值输出信号来控制热量输出的温度调节和利用阀门控制制冷容量。在这种情况下,为了全部关闭阀门,受控变量(ER*GAIN)应该有一个负值。 除了过程数据通道的功能外,SFB“CONT_S”(步进控制器)可以使用一个数字受控数值输出和手动影响控制数值选项,来实现一个完整的PI控制器。步进控制器不使用位置反馈信号。限位信号可以用于限制脉冲输出。详细的子功能说明如下: 1)设定点操作。设定点以浮点数格式在“SP_INT”输入端上输入。 2)实际数值操作。过程变量可以在外围设备(I/O)或浮点数格式输入。“CRP_IN”功能可以将“PV_PER”外围设备数值转换为一个浮点数格式的数值,范围在-100%和+100%之间,转换公式如下: CPRJN的输出=PV_PER×100/27648 “PV_NORM”功能可以根据下述公式标准化“CRP_IN”的输出: PV_NORM的输出=(CPR_IN的输出)×PV_FAC+PV_OFF PV_FAC的缺省值为“1”,PV_OFF的缺省值为“0”。 变量“PV_FAC”和“PV_OFF”为下述公式转化的结果: PV_OFF=(PV_NORM的输出)-(CPR_IN的输出)×PV_FAC PV_FAC=((PV_NORM的输出)- PV_OFF)/(CPR_IN的输出) 3)负偏差计算。设定点和实际数值之间的差别形成负值偏差。为了抑制由于受控变量的量化造成的小的、恒定的振荡(例如,由于执行机构阀门引起的受控数值的波动),为负偏差设置了一个死区( DEADBAND)。如果DEADB_W=0,则死区将关闭。
图8-20 有位置反馈信号的步进控制系统 由于控制器不使用任何位置反馈信号,内部计算的受控变量将不能准确地匹配信号控制元件的位置。如果受控变量(ER*GAIN)为负值,应进行调整。然后调节器置位输出端QLMNDN(受控量信号低),直到LMNR_LS(位置反馈信号下限)被置位。 控制器还可以在一个控制器级联中用做一个辅助控制器(第二个执行器)。设定点输入端“SP_INT”用于赋值控制元件的位置。在这种情况下,实际数值输入和参数“TI(积分时间)”必须设置为“0”。如通过电控阀瓣控制温度,即是借助二进制脉冲数值输出信号来控制热量输出的温度调节和利用阀门控制制冷容量。在这种情况下,为了全部关闭阀门,受控变量(ER*GAIN)应该有一个负值。 除了过程数据通道的功能外,SFB“CONT_S”(步进控制器)可以使用一个数字受控数值输出和手动影响控制数值选项,来实现一个完整的PI控制器。步进控制器不使用位置反馈信号。限位信号可以用于限制脉冲输出。详细的子功能说明如下: 1)设定点操作。设定点以浮点数格式在“SP_INT”输入端上输入。 2)实际数值操作。过程变量可以在外围设备(I/O)或浮点数格式输入。“CRP_IN”功能可以将“PV_PER”外围设备数值转换为一个浮点数格式的数值,范围在-100%和+100%之间,转换公式如下: CPRJN的输出=PV_PER×100/27648 “PV_NORM”功能可以根据下述公式标准化“CRP_IN”的输出: PV_NORM的输出=(CPR_IN的输出)×PV_FAC+PV_OFF PV_FAC的缺省值为“1”,PV_OFF的缺省值为“0”。 变量“PV_FAC”和“PV_OFF”为下述公式转化的结果: PV_OFF=(PV_NORM的输出)-(CPR_IN的输出)×PV_FAC PV_FAC=((PV_NORM的输出)- PV_OFF)/(CPR_IN的输出) 3)负偏差计算。设定点和实际数值之间的差别形成负值偏差。为了抑制由于受控变量的量化造成的小的、恒定的振荡(例如,由于执行机构阀门引起的受控数值的波动),为负偏差设置了一个死区( DEADBAND)。如果DEADB_W=0,则死区将关闭。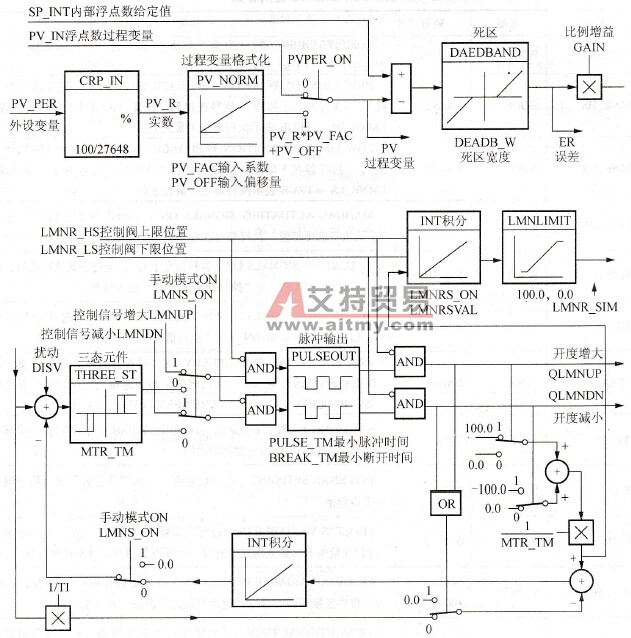 图8-21 SFB“CONT_S”(步进控制器)结构框图 4)PI步进算法。SFB/FB“CONT_S”(步进控制器)不使用位置反馈信号。PI算法的积分操作和假定位置反馈信号都在积分器( INT)中计算,并作为一个反馈值与剩余P操作进行比较。比较差被用于一个三步元件( THREE_ST)和一个脉冲发生器(PULSEOUT),以生成执行机构的控制脉冲。控制器的开关频率可以通过在三步元件上采用阈值控制来减少。 5)前馈控制。一个干扰变量被引入“DISV”输入端。 6)初始化操作。SFB/FB“CONT_S”(步进控制器)有一个初始化程序,可以在输入参数COM_RST=TRUE置位时运行。所有其他输出端都设置为其缺省值。 SFB“CONT_S”(步进控制器)结构框图如图8-21所示。
图8-21 SFB“CONT_S”(步进控制器)结构框图 4)PI步进算法。SFB/FB“CONT_S”(步进控制器)不使用位置反馈信号。PI算法的积分操作和假定位置反馈信号都在积分器( INT)中计算,并作为一个反馈值与剩余P操作进行比较。比较差被用于一个三步元件( THREE_ST)和一个脉冲发生器(PULSEOUT),以生成执行机构的控制脉冲。控制器的开关频率可以通过在三步元件上采用阈值控制来减少。 5)前馈控制。一个干扰变量被引入“DISV”输入端。 6)初始化操作。SFB/FB“CONT_S”(步进控制器)有一个初始化程序,可以在输入参数COM_RST=TRUE置位时运行。所有其他输出端都设置为其缺省值。 SFB“CONT_S”(步进控制器)结构框图如图8-21所示。

 PLC编程的基本规则
PLC编程的基本规则





