

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 .机械手结构、动作与控制要求 机械手在专用机床及自动生产线上应用十分广泛,主要用于搬动或装卸零件的重复动作,以实现生产自动化。本设计中的机械手采用关节式结构。各动
1.机械手结构、动作与控制要求 机械手在专用机床及自动生产线上应用十分广泛,主要用于搬动或装卸零件的重复动作,以实现生产自动化。本设计中的机械手采用关节式结构。各动作由液压驱动,并由电磁阀控制。动作顺序及各动作时间的间隔采用按时间原则控制的电气控制系统。 机械手的结构及与料架的配置如图10-6所示,机械手主要由手指1、手腕2、小手臂3和大手臂5等几部分组成。料架6为旋转式,由料盘和棘轮机构组成。每次转动一定角度(由工件数决定)以保证待加工零件4对准机械手。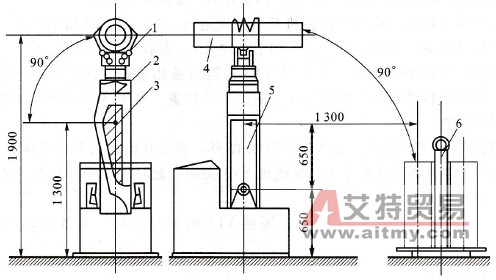 图10-6 机械手的外形及其与料架的配置 1-手部2-手腕3-小手臂4-工件5-大手臂6-料架 机械手各动作与相应电磁阀动作关系见表10 -3。 表10 -3 电磁阀状态表
图10-6 机械手的外形及其与料架的配置 1-手部2-手腕3-小手臂4-工件5-大手臂6-料架 机械手各动作与相应电磁阀动作关系见表10 -3。 表10 -3 电磁阀状态表 注:表中符号“+”表示电磁阀线圈接通。 以镗孔专用机床加工零件的上料、下料为例,机械手的动作顺序是:由原始位置将已加工好的工件卸下,放回料架,料架转过一定角度后,再将未加工零件拿起,送到加工位置,等待镗孔加工结束,再将加工完毕工件放回料架,如此重复循环。 具体动作顺序是: 原始位置(装好工件等待加工位置,其状态是大手臂竖立,小手臂伸出并处于水平位置,手腕横移向右,手指松开)→手指夹紧(抓住卡盘上的工件)→松卡盘→手腕左移(从卡盘上卸下已加工好的工件)→小手臂上摆→大手臂下摆→手指松开(工件放回料架)→小手臂收缩→料架转位→小手臂伸出→手指夹紧(抓住未加工零件)→大手臂上摆(取送零件)→小手臂下摆→手腕右移(将工件装到机床的主轴卡盘中)→卡盘收紧→手指松开,等待加工。 根据表10 -3及各动作中机械的状态,便可自行列出各动作中对YV1~YV11线圈的通电要求。 2.设计要求 (1)加工中上料、下料各动作采用自动循环。 (2)各动作之间应有一定的延时(由时间继电器调定)。 (3)机械手各部分应能单独动作,以便于调整及维修。 (4)油泵电机(采用Y100L2 -4,容量为3 kW)及各电磁阀运行状态应有指示。 3.设计任务 (1)作出PLC的I/O分配表、I/O接线图、设计流程图、梯形图、指令语句表、操作板面布置图。 (2)编制设计说明书、使用说明与设计小结。 (3)列出设计参考资料目录。
注:表中符号“+”表示电磁阀线圈接通。 以镗孔专用机床加工零件的上料、下料为例,机械手的动作顺序是:由原始位置将已加工好的工件卸下,放回料架,料架转过一定角度后,再将未加工零件拿起,送到加工位置,等待镗孔加工结束,再将加工完毕工件放回料架,如此重复循环。 具体动作顺序是: 原始位置(装好工件等待加工位置,其状态是大手臂竖立,小手臂伸出并处于水平位置,手腕横移向右,手指松开)→手指夹紧(抓住卡盘上的工件)→松卡盘→手腕左移(从卡盘上卸下已加工好的工件)→小手臂上摆→大手臂下摆→手指松开(工件放回料架)→小手臂收缩→料架转位→小手臂伸出→手指夹紧(抓住未加工零件)→大手臂上摆(取送零件)→小手臂下摆→手腕右移(将工件装到机床的主轴卡盘中)→卡盘收紧→手指松开,等待加工。 根据表10 -3及各动作中机械的状态,便可自行列出各动作中对YV1~YV11线圈的通电要求。 2.设计要求 (1)加工中上料、下料各动作采用自动循环。 (2)各动作之间应有一定的延时(由时间继电器调定)。 (3)机械手各部分应能单独动作,以便于调整及维修。 (4)油泵电机(采用Y100L2 -4,容量为3 kW)及各电磁阀运行状态应有指示。 3.设计任务 (1)作出PLC的I/O分配表、I/O接线图、设计流程图、梯形图、指令语句表、操作板面布置图。 (2)编制设计说明书、使用说明与设计小结。 (3)列出设计参考资料目录。

 PLC编程的基本规则
PLC编程的基本规则





