

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介一、应用背景与需求 步进电机是一种常用的电气执行元件,广泛应用于自动化控制领域。在对传统机床的数控化改造中,越来越多地采用 PLC 作为控制器实现对机床电气控制系统的改造
一、应用背景与需求 步进电机是一种常用的电气执行元件,广泛应用于自动化控制领域。在对传统机床的数控化改造中,越来越多地采用PLC作为控制器实现对机床电气控制系统的改造,其中对数控机床的典型执行元件步进电机的控制是一个重要的内容。 步进电机是一种用电脉冲进行控制、将电脉冲信号转换成相应角位移的电机。它的运转需要配备一个专门的驱动电源,驱动电源的输出受外部的脉冲信号和方向信号控制。每一个脉冲信号可使步进电机旋转一个固定的角度,这个角度称为步距角。脉冲的数量决定了旋转的总角度,脉冲的频率决定了旋转的速度。方向信号决定了旋转的方向。 就一个传动速比确定的具体设备而言,无需距离、速度信号反馈环,只需控制脉冲的数量和频率即可控制设备移动部件的移动距离和速度;而方向信号可控制移动的方向。另外,步进电机可以实现细分运转方式。这样,尽管步进电机的步距角受到机械制造的限制不能很小,但可以通过电气控制的方式使步进电机的运转由原来的每个整步细分成m个小步来完成,提高了设备运行的精度和平稳性。因此,步进电机一般需要专门的驱动器来控制。 对于那些在运行过程中移动距离和速度均确定的具体设备,采用PLC通过驱动器来控制步进电机的运转是一种理想的技术方案。本例介绍PLC控制步进电机的方法。 二、PLC控制步进电机的方式 1.PLC控制步进电机的一般方式 PLC控制步进电机系统的示意图如图6.11所示。在控制过程中,在控制面板上设定移动距离、速度和方向等参数。PLC读入这些设定值后,通过运算产生脉冲、方向信号,控制步进电机的驱动器,达到对距离、速度、方向控制的目的。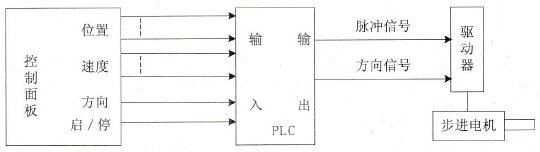 图6.11 PLC控制步进电机系统示意图 图中,控制面板上的位置旋钮控制移动的距离,速度旋钮控制移动的速度,方向按钮控制移动的方向,启/停按钮控制电机的启动与停止。 实际系统中的位置与速度往往需要分成几挡,因此位置、速度旋钮可选用波段开关。通过对波段开关的不同跳线进行编码,可减少操作面板与PLC的连线数量,同时也减少了PLC的输入点数。 在一个实际的控制系统中,要根据负载的情况来选择步进电机。步进电机能响应而不失步的最高步进频率称为“启动频率”,与此类似,“停止频率”是指系统控制信号突然关断,步进电机不冲过目标位置的最高步进频率。电机的启动频率、停止频率和输出转矩都要和负载的转动惯量相适应。 在对PLC选型和编程前,应计算系统的脉冲当量、脉冲频率上限和最大脉冲数量。根据脉冲信号的频率可以确定PLC高速脉冲输出时需要的频率,根据脉冲数量可以确定PLC的位宽。同时,考虑到系统响应的及时性、可靠性和使用寿命,PLC应选择晶体管输出型。 步进电机细分数的选择以避开电机的共振频率为原则,一般可选择2、5、10、25细分。编制PLC控制程序时应将传动系统的脉冲当量、反向间隙、步进电机的细分数定义为参数变量,以便现场调整。 PLC编程中需要的参数计算公式如下。 ·脉冲当量=(步进电机步距角×螺距)/(360×传动速比) ·脉冲频率上限=(移动速度×步进电机细分数)/脉冲当量 ·最大脉冲数量=(移动距离×步进电机细分数)/脉冲当量 2.步进电机驱动器的控制 下面以WD3-007型驱动器为例,介绍步进电机驱动器的控制问题。该驱动器主要驱动2Nm~12Nm的三相混合式步进电机。控制信号的意义如下。 ·PULSE:脉冲信号,每一个脉冲的上升沿使电机转动一步。 ·DIR:方向信号,与PULSE信号配合使用,低电平电机顺时针旋转,高电平,电机 逆时针旋转。 ·CW:正转信号,每个脉冲使电机正向转动一步(与CCW信号配合)。 ·CCW:反转信号,每个脉冲使电机反向转动一步(与CW信号配合)。 PULSE与CW、DIR与CCW对应同一个接口,它们是按控制方式不同给出的两种定义名称。 此外,在驱动器上设有STEP1、STEP2拨码开关,用于设置电机每转步数,可以设为500、1000、5000和10000。PULSE.SYS拨码开关用于设置控制方式,OFF时为“脉冲和方向”控制方式,ON时为“正转和反转”控制方式。 控制信号要求:7mA≤高电流≤25mA,-25mA≤低电流≤0.2mA。由于PLC的控制电源多配置24V开关电源,此时可以串接1.8Q的限流电阻。 步进电机及其驱动器与数字控制系统配套时,可以体现出更大的优越性。为了配合步进电机的控制,许多PLC都内置了脉冲输出功能,并设置了相应的控制指令,可以很好地对步进电机进行控制。 以OMROn公司的CPM2A晶体管输出型PLC为例,它有两个脉冲输出端01000和01001端子,随着控制方式的不同,有3种脉冲输出形式。 ·两个脉冲输出端可以用来作为两个不带加减速的单相脉冲输出端,主要使用PULS 和SPED指令进行控制,频率范围为10Hz~10kHz(变化单位10Hz),可以连续输出, 也可以脉冲串形式输出,可以同时单独输出。01000端子对应脉冲输出端口0,01001 端子对应脉冲输出端口1。 ·两个脉冲输出端可以作为两相可变占空比的连续脉冲输出端,主要使用PWM指令控 制,占空比设置范围为0%~100%(设置单位为1%),频率设置范围0.1Hz~ 999.9Hz (设置单位为0.1Hz)。 ·可以作为带梯形加减速的两相脉冲输出,主要使用PULS和ACC指令控制,频率变 化范围10Hz~10kHz(设置单位10Hz),加减速率10Hz/10ms~10kHz/10ms(设置单 位10Hz),可以连续输出,也可以脉冲串形式输出。这里又分为两种控制方式,一种 是脉冲+方向控制(01000输出脉冲,01001输出方向),一种是正反向脉冲输出( 01000 输出CW脉冲,01001输出CCW脉冲)。以脉冲串形式输出时,可设置的脉冲数为 ±1~±16777215,PLC的这种脉冲输出不受扫描周期的影响。 三、PLC控制步进电机的实现 1.控制坐标系的建立 PLC对步进电机的控制首先要确立坐标系,可以设为相对坐标系,也可以设为绝对坐标系。坐标系的设置在DM6629字中,00~03位对应脉冲输出0,04~07位对应脉冲输出1。设置为0时,为相对坐标系;设置为l时,为绝对坐标系。 注意:坐标系要事先确定,一经设定,在系统运行时,状态就不能再改变。 (1)对于不带加减速的单相脉冲输出 当PLC控制坐标系设定为相对坐标系时,可以从端口0和端口1以增量的形式输出脉冲,输出脉冲的计数值,对于端口0记录在SR229、SR228通道,对于端口1记录在SR231、SR230通道中。 如设输出脉冲数为00000100时从端口输出100个脉冲,脉冲计数值从0计到100,之后还可以继续从该端口输出脉冲,即可以增量输出脉冲。每次输出脉冲时,脉冲计数值从0开始重新计数,计满设定值为止。 当设为绝对坐标系时,输出脉冲数可以设置为正数,如00000100(相当于电机正向转动100步),也可以设置为负数,如80000100(最高位为“1”表示负数,相当于电机反向转动100步)。但由于是单相脉冲输出,需另外加方向控制信号,可以用01002等输出端做方向信号输出。 在绝对坐标系中,坐标值记录在SR229、SR228通道(端口0)和SR231、SR230通道中(端口1)。每次输出脉冲数是脉冲设置值和当前坐标值的差,如当前坐标值为0,设置输出值为00000100,输出100个脉冲(正向输出信号有效),再设置输出值为00000100,不再输出脉冲,再设置输出值为80000100,再输出200个脉冲(反向输出信号有效),坐标值由00000100变为80000100。 (2)对于带加减速的两相脉冲输出 当设置为相对坐标系时,也可以实现增量脉冲输出。由于两相脉冲输出可以直接控制电机正反向,所以脉冲输出值可以设置为正数,也可以设置为负数,输出脉冲的计数值记录在SR229、SR228通道(端口0)中。如设置输出脉冲数为00000100,电机正向运转100步,脉冲计数值从00000000计到00000100,再设置输出脉冲数为80000100,电机反向运转100步,脉冲计数值从80000000计到80000100。 当设置为绝对坐标系时,坐标值记录在SR229、SR228通道(端口0)中,坐标变化情况类似于单相脉冲输出,但正/反向脉冲输出或脉冲+方向输出由01000和01001两个端口配合完成。 2.单轴运行控制 (1)带加减速的单轴正反转控制 带加减速单轴正反转运控制的控制接线及时序如图6.12和图6.13所示,图6.12中用两相脉冲输出CW/CCW方式进行控制,也可以用PULSE+DIR方式控制。
图6.11 PLC控制步进电机系统示意图 图中,控制面板上的位置旋钮控制移动的距离,速度旋钮控制移动的速度,方向按钮控制移动的方向,启/停按钮控制电机的启动与停止。 实际系统中的位置与速度往往需要分成几挡,因此位置、速度旋钮可选用波段开关。通过对波段开关的不同跳线进行编码,可减少操作面板与PLC的连线数量,同时也减少了PLC的输入点数。 在一个实际的控制系统中,要根据负载的情况来选择步进电机。步进电机能响应而不失步的最高步进频率称为“启动频率”,与此类似,“停止频率”是指系统控制信号突然关断,步进电机不冲过目标位置的最高步进频率。电机的启动频率、停止频率和输出转矩都要和负载的转动惯量相适应。 在对PLC选型和编程前,应计算系统的脉冲当量、脉冲频率上限和最大脉冲数量。根据脉冲信号的频率可以确定PLC高速脉冲输出时需要的频率,根据脉冲数量可以确定PLC的位宽。同时,考虑到系统响应的及时性、可靠性和使用寿命,PLC应选择晶体管输出型。 步进电机细分数的选择以避开电机的共振频率为原则,一般可选择2、5、10、25细分。编制PLC控制程序时应将传动系统的脉冲当量、反向间隙、步进电机的细分数定义为参数变量,以便现场调整。 PLC编程中需要的参数计算公式如下。 ·脉冲当量=(步进电机步距角×螺距)/(360×传动速比) ·脉冲频率上限=(移动速度×步进电机细分数)/脉冲当量 ·最大脉冲数量=(移动距离×步进电机细分数)/脉冲当量 2.步进电机驱动器的控制 下面以WD3-007型驱动器为例,介绍步进电机驱动器的控制问题。该驱动器主要驱动2Nm~12Nm的三相混合式步进电机。控制信号的意义如下。 ·PULSE:脉冲信号,每一个脉冲的上升沿使电机转动一步。 ·DIR:方向信号,与PULSE信号配合使用,低电平电机顺时针旋转,高电平,电机 逆时针旋转。 ·CW:正转信号,每个脉冲使电机正向转动一步(与CCW信号配合)。 ·CCW:反转信号,每个脉冲使电机反向转动一步(与CW信号配合)。 PULSE与CW、DIR与CCW对应同一个接口,它们是按控制方式不同给出的两种定义名称。 此外,在驱动器上设有STEP1、STEP2拨码开关,用于设置电机每转步数,可以设为500、1000、5000和10000。PULSE.SYS拨码开关用于设置控制方式,OFF时为“脉冲和方向”控制方式,ON时为“正转和反转”控制方式。 控制信号要求:7mA≤高电流≤25mA,-25mA≤低电流≤0.2mA。由于PLC的控制电源多配置24V开关电源,此时可以串接1.8Q的限流电阻。 步进电机及其驱动器与数字控制系统配套时,可以体现出更大的优越性。为了配合步进电机的控制,许多PLC都内置了脉冲输出功能,并设置了相应的控制指令,可以很好地对步进电机进行控制。 以OMROn公司的CPM2A晶体管输出型PLC为例,它有两个脉冲输出端01000和01001端子,随着控制方式的不同,有3种脉冲输出形式。 ·两个脉冲输出端可以用来作为两个不带加减速的单相脉冲输出端,主要使用PULS 和SPED指令进行控制,频率范围为10Hz~10kHz(变化单位10Hz),可以连续输出, 也可以脉冲串形式输出,可以同时单独输出。01000端子对应脉冲输出端口0,01001 端子对应脉冲输出端口1。 ·两个脉冲输出端可以作为两相可变占空比的连续脉冲输出端,主要使用PWM指令控 制,占空比设置范围为0%~100%(设置单位为1%),频率设置范围0.1Hz~ 999.9Hz (设置单位为0.1Hz)。 ·可以作为带梯形加减速的两相脉冲输出,主要使用PULS和ACC指令控制,频率变 化范围10Hz~10kHz(设置单位10Hz),加减速率10Hz/10ms~10kHz/10ms(设置单 位10Hz),可以连续输出,也可以脉冲串形式输出。这里又分为两种控制方式,一种 是脉冲+方向控制(01000输出脉冲,01001输出方向),一种是正反向脉冲输出( 01000 输出CW脉冲,01001输出CCW脉冲)。以脉冲串形式输出时,可设置的脉冲数为 ±1~±16777215,PLC的这种脉冲输出不受扫描周期的影响。 三、PLC控制步进电机的实现 1.控制坐标系的建立 PLC对步进电机的控制首先要确立坐标系,可以设为相对坐标系,也可以设为绝对坐标系。坐标系的设置在DM6629字中,00~03位对应脉冲输出0,04~07位对应脉冲输出1。设置为0时,为相对坐标系;设置为l时,为绝对坐标系。 注意:坐标系要事先确定,一经设定,在系统运行时,状态就不能再改变。 (1)对于不带加减速的单相脉冲输出 当PLC控制坐标系设定为相对坐标系时,可以从端口0和端口1以增量的形式输出脉冲,输出脉冲的计数值,对于端口0记录在SR229、SR228通道,对于端口1记录在SR231、SR230通道中。 如设输出脉冲数为00000100时从端口输出100个脉冲,脉冲计数值从0计到100,之后还可以继续从该端口输出脉冲,即可以增量输出脉冲。每次输出脉冲时,脉冲计数值从0开始重新计数,计满设定值为止。 当设为绝对坐标系时,输出脉冲数可以设置为正数,如00000100(相当于电机正向转动100步),也可以设置为负数,如80000100(最高位为“1”表示负数,相当于电机反向转动100步)。但由于是单相脉冲输出,需另外加方向控制信号,可以用01002等输出端做方向信号输出。 在绝对坐标系中,坐标值记录在SR229、SR228通道(端口0)和SR231、SR230通道中(端口1)。每次输出脉冲数是脉冲设置值和当前坐标值的差,如当前坐标值为0,设置输出值为00000100,输出100个脉冲(正向输出信号有效),再设置输出值为00000100,不再输出脉冲,再设置输出值为80000100,再输出200个脉冲(反向输出信号有效),坐标值由00000100变为80000100。 (2)对于带加减速的两相脉冲输出 当设置为相对坐标系时,也可以实现增量脉冲输出。由于两相脉冲输出可以直接控制电机正反向,所以脉冲输出值可以设置为正数,也可以设置为负数,输出脉冲的计数值记录在SR229、SR228通道(端口0)中。如设置输出脉冲数为00000100,电机正向运转100步,脉冲计数值从00000000计到00000100,再设置输出脉冲数为80000100,电机反向运转100步,脉冲计数值从80000000计到80000100。 当设置为绝对坐标系时,坐标值记录在SR229、SR228通道(端口0)中,坐标变化情况类似于单相脉冲输出,但正/反向脉冲输出或脉冲+方向输出由01000和01001两个端口配合完成。 2.单轴运行控制 (1)带加减速的单轴正反转控制 带加减速单轴正反转运控制的控制接线及时序如图6.12和图6.13所示,图6.12中用两相脉冲输出CW/CCW方式进行控制,也可以用PULSE+DIR方式控制。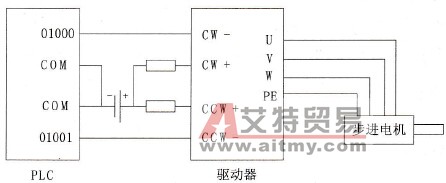 图6.12 控制接线图 用两相脉冲输出CW/CCW方式进行控制,PLC的控制程序如图6.14所示,梯形图中设定参数如下。 ·DM0010值为0001,对应加减速率为10Hz/10ms。 ·DM0011值为0050,对应目标频率为500Hz。 ·DM0012值为0020,对应启动频率为200Hz。
图6.12 控制接线图 用两相脉冲输出CW/CCW方式进行控制,PLC的控制程序如图6.14所示,梯形图中设定参数如下。 ·DM0010值为0001,对应加减速率为10Hz/10ms。 ·DM0011值为0050,对应目标频率为500Hz。 ·DM0012值为0020,对应启动频率为200Hz。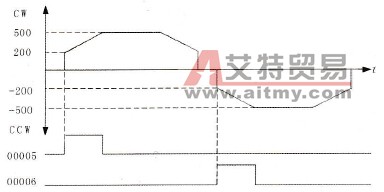 图6.13 控制时序图
图6.13 控制时序图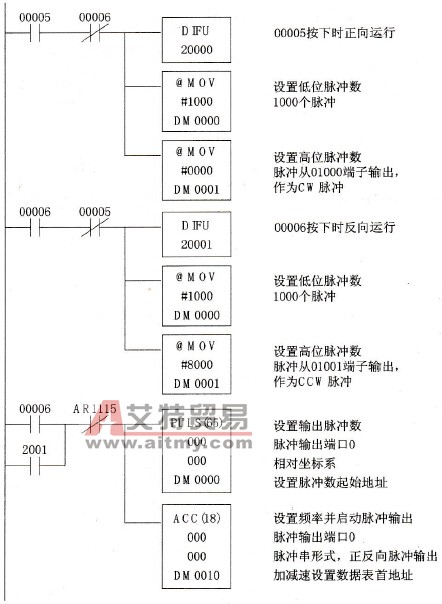 图6.14 控制梯形图 (2)可变占空比的单轴运动控制 可变占空比的单轴运动的控制接线与图6.12所示带加减速单轴正反转运控制的控制接线方法相同。这种方式下主要用PWM指令来进行控制,只能以连续方式输出脉冲,但是电机的运行频率可以控制得很精细。 3.双轴运行控制 (1)带正反向的二轴运动控制 双轴运行控制使用一台PLC控制两个驱动器,驱动两个步进电机的运动。带正反向二轴运动控制的接线如图6.15所示。
图6.14 控制梯形图 (2)可变占空比的单轴运动控制 可变占空比的单轴运动的控制接线与图6.12所示带加减速单轴正反转运控制的控制接线方法相同。这种方式下主要用PWM指令来进行控制,只能以连续方式输出脉冲,但是电机的运行频率可以控制得很精细。 3.双轴运行控制 (1)带正反向的二轴运动控制 双轴运行控制使用一台PLC控制两个驱动器,驱动两个步进电机的运动。带正反向二轴运动控制的接线如图6.15所示。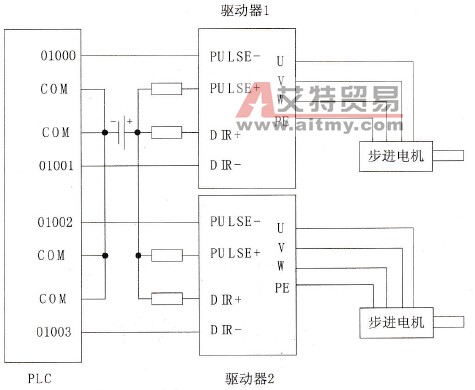 图6.15 带正反向二轴运动控制接线图 PLC的控制程序如图6.16所示,梯形图中01002和01003为ON时电机顺时针转动,为OFF时电机逆时针转动。
图6.15 带正反向二轴运动控制接线图 PLC的控制程序如图6.16所示,梯形图中01002和01003为ON时电机顺时针转动,为OFF时电机逆时针转动。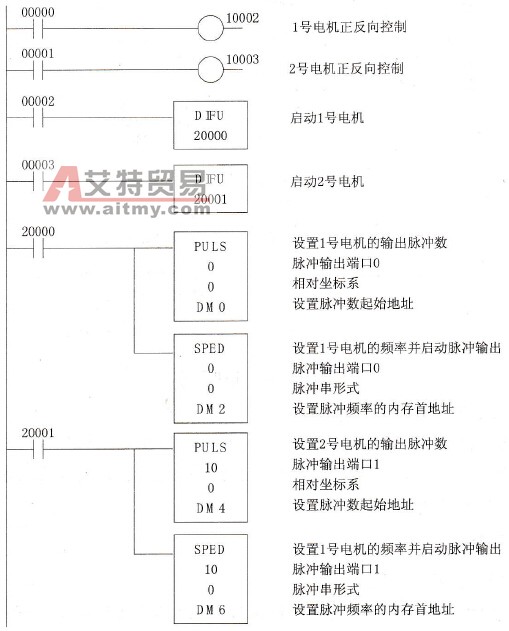 图6.16 带正反向的二轴运动控制梯形图 如果用连续脉冲输出也可以实现控制,这时需用下面所示的SPED指令或rNI指令使电机停转,如图6.17所示。 SPED指令中各参数的含义。 ·P:指定输出端口号,000表示输出到端口0,010表示输出到端口1。 ·M:模式定义,000表示为脉冲串形式,001表示为连续脉冲形式。 ·F:设为0Hz。 同样,INT指令中的参数P指定端口号,第二个参数设定为“003”用于停止脉冲输出。 (2)不带正反向的二轴运动控制 不带正反向的双轴运动控制的接线图如图6.18所示,当有脉冲输出时,电机逆时针转动。这种方式和方式1的差别就是不用01002和01003作方向控制。
图6.16 带正反向的二轴运动控制梯形图 如果用连续脉冲输出也可以实现控制,这时需用下面所示的SPED指令或rNI指令使电机停转,如图6.17所示。 SPED指令中各参数的含义。 ·P:指定输出端口号,000表示输出到端口0,010表示输出到端口1。 ·M:模式定义,000表示为脉冲串形式,001表示为连续脉冲形式。 ·F:设为0Hz。 同样,INT指令中的参数P指定端口号,第二个参数设定为“003”用于停止脉冲输出。 (2)不带正反向的二轴运动控制 不带正反向的双轴运动控制的接线图如图6.18所示,当有脉冲输出时,电机逆时针转动。这种方式和方式1的差别就是不用01002和01003作方向控制。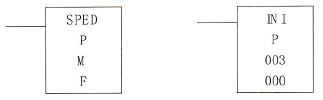 图6.17 SPED指令与INI指令
图6.17 SPED指令与INI指令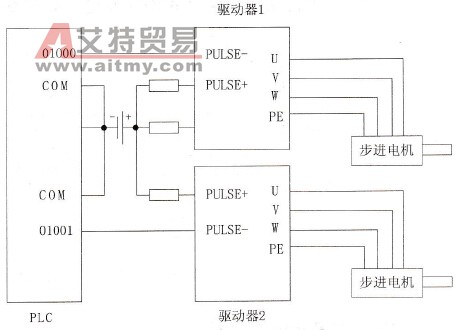 图6.18 不带正反向的双轴运动控制 在方式1和方式2中,对两台电机的控制是独立的。如果采用适当的控制算法可以实现二轴联动。一台PLC可以同时控制两台步进电机,这在数控系统中是非常有现实意义。 四、总结与评价 现代自动控制设备中,步进电机的应用越来越多,对步进电机的控制成为一个普遍性的问题。由于现今的PLC功能越来越强,指令速度越来越快,用微小型PLC就能构成各种的步进电机控制系统,具有控制简单、运行稳定、开发周期短等优点,是一种切实可行的步进电机控制方案。本例主要介绍的是步进电机的开环控制,如果用旋转编码器做速度或位置反馈,结合PLC的高速脉冲计数功能,还可实现闭环控制。
图6.18 不带正反向的双轴运动控制 在方式1和方式2中,对两台电机的控制是独立的。如果采用适当的控制算法可以实现二轴联动。一台PLC可以同时控制两台步进电机,这在数控系统中是非常有现实意义。 四、总结与评价 现代自动控制设备中,步进电机的应用越来越多,对步进电机的控制成为一个普遍性的问题。由于现今的PLC功能越来越强,指令速度越来越快,用微小型PLC就能构成各种的步进电机控制系统,具有控制简单、运行稳定、开发周期短等优点,是一种切实可行的步进电机控制方案。本例主要介绍的是步进电机的开环控制,如果用旋转编码器做速度或位置反馈,结合PLC的高速脉冲计数功能,还可实现闭环控制。

 PLC编程的基本规则
PLC编程的基本规则





