

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介一、应用背景与需求 物料的混合操作是一些工厂关键的或不可缺少的一环。对物料混合装置的要求是设备对物料的混合质量高、生产效率和自动化程度高、适应范围广、抗恶劣工作环境
一、应用背景与需求 物料的混合操作是一些工厂关键的或不可缺少的一环。对物料混合装置的要求是设备对物料的混合质量高、生产效率和自动化程度高、适应范围广、抗恶劣工作环境等。采用PLC对物料混合装置进行控制恰恰能满足这些要求,因此多种物料混合的PLC控制具有广泛的应用。 多种液体按一定比例的混合是物料混合的一种典型形式。本例以两种液体的混合装置为例,说明PLC在其中的应用。 二、液体混合装置PLC控制系统设计 1.工艺过程分析 图8.4所示是一个液体混合装置的工作示意图,用于将两种液体按一定的比例进行充分混合。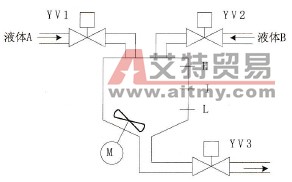 图8.4 液体混合装置示意图 混合装置的工作过程如下。 ·按启动按钮SB1后,电磁阀YV1通电打开,液体A流入容器。 ·当液位高度到达I时,液位传感器I接通,此时电磁阀YV1断电关闭,而电磁阀YV2通电打开,液体B流入容器。 ·当液位高度到达H时,液位传感器H接通,这时电磁阀YV2断电关闭,同时启动电动机M搅拌。 ·1min后,电动机M停止搅拌,这时电磁阀YV3通电打开,放出混合后的液体到下一道工序。 · 当液位高度下降到L后,再延时2s,电磁阀YV3断电关闭,并自动开始新的工作周期。 此外,该液体混合装置在按下停机按钮SB2时,要求不要立即停止工作,而是将停机信号记忆下来,直到完成一个工作循环时才停止工作。 2.PLC选型与I/O分配 系统的输入信号有:按钮2个,液位传感器3个,共5个输入信号;系统的输出信号有:电磁阀3个,电动机接触器1个,共4个输出点。考虑到留有15%的备用点,可选用OMROM公司的CPMIA-20CDR-A型PLC,它有12个输入点,8个输出点,交流供电,满足本例的要求。PLC的输入/输出端子分配如表8.3所示。 表8.3 PLC的输入/输出端子分配表
图8.4 液体混合装置示意图 混合装置的工作过程如下。 ·按启动按钮SB1后,电磁阀YV1通电打开,液体A流入容器。 ·当液位高度到达I时,液位传感器I接通,此时电磁阀YV1断电关闭,而电磁阀YV2通电打开,液体B流入容器。 ·当液位高度到达H时,液位传感器H接通,这时电磁阀YV2断电关闭,同时启动电动机M搅拌。 ·1min后,电动机M停止搅拌,这时电磁阀YV3通电打开,放出混合后的液体到下一道工序。 · 当液位高度下降到L后,再延时2s,电磁阀YV3断电关闭,并自动开始新的工作周期。 此外,该液体混合装置在按下停机按钮SB2时,要求不要立即停止工作,而是将停机信号记忆下来,直到完成一个工作循环时才停止工作。 2.PLC选型与I/O分配 系统的输入信号有:按钮2个,液位传感器3个,共5个输入信号;系统的输出信号有:电磁阀3个,电动机接触器1个,共4个输出点。考虑到留有15%的备用点,可选用OMROM公司的CPMIA-20CDR-A型PLC,它有12个输入点,8个输出点,交流供电,满足本例的要求。PLC的输入/输出端子分配如表8.3所示。 表8.3 PLC的输入/输出端子分配表 三、液体混合装置PLC控制梯形图设计 根据该液体混合装置的控制要求,并考虑到各个执行机构动作的转步条件,可画出其控制流程图,如图8.5所示。可以看出,这是一种典型的步进控制,可以用移位寄存器指令(SFT)很方便地实现步进控制,梯形图程序如图8.6所示,说明如下。 ·考虑到移位寄存器的移位脉冲用窄脉冲较为合适,所以将各启动按钮信号和各液位传感器信号用微分指令均转换成窄脉冲。 ·按下启动按钮时,用MOV指令将移位寄存器通道的最低位HR000置“1”,并由该位控制输出继电器01001接通,使外接的YV1电磁阀通电打开,液体A流入容器。在按下启动按钮的同时,保持继电器HR0100接通并锁存。
三、液体混合装置PLC控制梯形图设计 根据该液体混合装置的控制要求,并考虑到各个执行机构动作的转步条件,可画出其控制流程图,如图8.5所示。可以看出,这是一种典型的步进控制,可以用移位寄存器指令(SFT)很方便地实现步进控制,梯形图程序如图8.6所示,说明如下。 ·考虑到移位寄存器的移位脉冲用窄脉冲较为合适,所以将各启动按钮信号和各液位传感器信号用微分指令均转换成窄脉冲。 ·按下启动按钮时,用MOV指令将移位寄存器通道的最低位HR000置“1”,并由该位控制输出继电器01001接通,使外接的YV1电磁阀通电打开,液体A流入容器。在按下启动按钮的同时,保持继电器HR0100接通并锁存。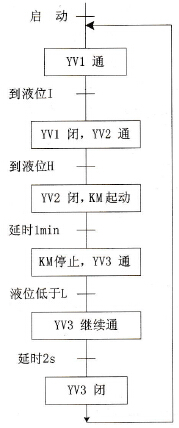 图8.5 液体混合装置的控制流程图
图8.5 液体混合装置的控制流程图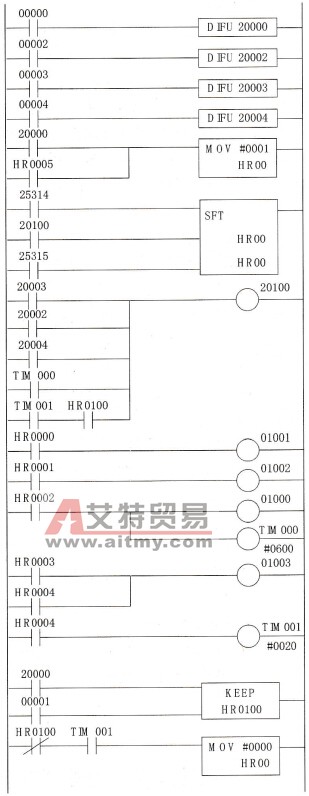 图8.6 液体混合装置的控制梯形图 ·当液位高度上升到I时,液位传感器I闭合,输入继电器00003接通,其上升沿经微分后使20100接通一个扫描周期(如图7-10所示的第7梯级),而20100就作为移位寄存器的移位脉冲,使HROO通道中的各位依次移一位,即HR0001=1。由于移位继电器的输入端逻辑为25314,这是始终保持OFF的特殊功能寄存器,从而保证每次移位时均是“0”移入HR00通道的最低位。这时输出继电器01001断开使YV1电磁阀断电,而HR0001=1控制输出继电器01002接通,使外接的YV2电磁阀通电打开,液体B流入容器。 ·当液位高度到达I时,输入继电器00003接通,其上升沿经微分后使20100又接通一个扫描周期,使移位寄存器通道HR00中的各位再移一位,即HR0002=1,此时输出继电器01002断开使YV2电磁阀断电,而输出继电器01000接通,使外接的接触器KM线圈通电,电动机启动运转,同时内部定时器TIM000开始定时。 ·当定时器TIM000定时60s时间到时,其常开触点闭合使20100接通,移位寄存器通道HR00中的各位再移一位,即HR0003=1,此时输出继电器01000断开使KM接触器线圈断电,电动机停转,而输出继电器01003接通,使外接的YV3电磁阀通电,混合后的液体排放到下道工序去。 ·当液位下降到传感器位置I以下时,液位传感器I断开,输入继电器00004断开,经下降沿微分后使20100接通一个扫描周期,移位寄存器HR00中的各位再移动一位,即HR0004=1,它一方面控制YV3电磁阀继续通电,同时使内部定时器TIM001开始定时。 ·当定时器TIM001定时2s时间到时,其常开触点闭合使20100接通,移位寄存器通道HR00中的各位再移动一位,即HR0005 =1,此时输出继电器01003断开使YV3电磁阀断电,完成一个循环的工作。同时,HR0005接点闭合使MOV指令被执行,将移位寄存器通道的最低位HR000置“1”,从而又开始了新的循环。 ·当按下停止按钮SB2时,输入继电器00001接通,使保持继电器HR0100复位,HR0100的常开触点断开。因此在液体放完、定时器TIM001的延时时间到时,不再接通内部继电器20100,而是执行MOV指令,将移位寄存器通道HR00全部清“0”,使整机停止工作。 四、总结与评价 通过对液体混合控制过程的分析可知,液体混合装置的控制具有典型的步进控制的特点。本例利用移位寄存器SFT指令实现控制流程的步进控制,是一种易于实现的方法,适用于对各类物料混合装置的控制。 这种方法的一个突出特点是,通过程序使移位寄存器每次移位时仅有一个“1”在通道中移动,这样就保证了各步之间的互锁,因而就不必像经验设计法中完全依靠触点来进行互锁,经常会“顾此失彼”,从而简化设计过程,这在步数较多、控制要求较复杂的步进控制中更能显出其优越性。
图8.6 液体混合装置的控制梯形图 ·当液位高度上升到I时,液位传感器I闭合,输入继电器00003接通,其上升沿经微分后使20100接通一个扫描周期(如图7-10所示的第7梯级),而20100就作为移位寄存器的移位脉冲,使HROO通道中的各位依次移一位,即HR0001=1。由于移位继电器的输入端逻辑为25314,这是始终保持OFF的特殊功能寄存器,从而保证每次移位时均是“0”移入HR00通道的最低位。这时输出继电器01001断开使YV1电磁阀断电,而HR0001=1控制输出继电器01002接通,使外接的YV2电磁阀通电打开,液体B流入容器。 ·当液位高度到达I时,输入继电器00003接通,其上升沿经微分后使20100又接通一个扫描周期,使移位寄存器通道HR00中的各位再移一位,即HR0002=1,此时输出继电器01002断开使YV2电磁阀断电,而输出继电器01000接通,使外接的接触器KM线圈通电,电动机启动运转,同时内部定时器TIM000开始定时。 ·当定时器TIM000定时60s时间到时,其常开触点闭合使20100接通,移位寄存器通道HR00中的各位再移一位,即HR0003=1,此时输出继电器01000断开使KM接触器线圈断电,电动机停转,而输出继电器01003接通,使外接的YV3电磁阀通电,混合后的液体排放到下道工序去。 ·当液位下降到传感器位置I以下时,液位传感器I断开,输入继电器00004断开,经下降沿微分后使20100接通一个扫描周期,移位寄存器HR00中的各位再移动一位,即HR0004=1,它一方面控制YV3电磁阀继续通电,同时使内部定时器TIM001开始定时。 ·当定时器TIM001定时2s时间到时,其常开触点闭合使20100接通,移位寄存器通道HR00中的各位再移动一位,即HR0005 =1,此时输出继电器01003断开使YV3电磁阀断电,完成一个循环的工作。同时,HR0005接点闭合使MOV指令被执行,将移位寄存器通道的最低位HR000置“1”,从而又开始了新的循环。 ·当按下停止按钮SB2时,输入继电器00001接通,使保持继电器HR0100复位,HR0100的常开触点断开。因此在液体放完、定时器TIM001的延时时间到时,不再接通内部继电器20100,而是执行MOV指令,将移位寄存器通道HR00全部清“0”,使整机停止工作。 四、总结与评价 通过对液体混合控制过程的分析可知,液体混合装置的控制具有典型的步进控制的特点。本例利用移位寄存器SFT指令实现控制流程的步进控制,是一种易于实现的方法,适用于对各类物料混合装置的控制。 这种方法的一个突出特点是,通过程序使移位寄存器每次移位时仅有一个“1”在通道中移动,这样就保证了各步之间的互锁,因而就不必像经验设计法中完全依靠触点来进行互锁,经常会“顾此失彼”,从而简化设计过程,这在步数较多、控制要求较复杂的步进控制中更能显出其优越性。

 PLC编程的基本规则
PLC编程的基本规则





