

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介PLC 的 PID 控制器的设计是以连续系统的 PID 控制规律为基础,将其数字化,写成离散形式的 PID 控制方程,再根据离散方程进行控制程序设计。 在连续系统中,典型的 PID 闭环控制系统如
PLC的PID控制器的设计是以连续系统的PID控制规律为基础,将其数字化,写成离散形式的PID控制方程,再根据离散方程进行控制程序设计。 在连续系统中,典型的PID闭环控制系统如图9.11所示。图中sp(t)是给定值,pv(t)为反馈量,c(t)为系统的输出量,PID控制器的输入输出关系式为: (9-6)式中,M(t) -控制器的输出,M0为输出的初始值。 e(t)= sp(t) - pv(t) -误差信号。 Kc -比例系数。 TI-积分时间常数。 TD-微分时间常数。
(9-6)式中,M(t) -控制器的输出,M0为输出的初始值。 e(t)= sp(t) - pv(t) -误差信号。 Kc -比例系数。 TI-积分时间常数。 TD-微分时间常数。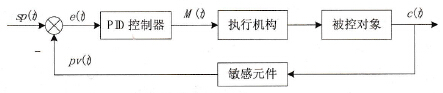 图9.11 连续闭环控制系统方框图 式9-5中等号右边前3项分别是比例、积分、微分部分,它们分别与误差、误差的积分和微分成正比。如果取其中的一项或两项,可以组成P、PD或PI控制器。 假设采样周期为Ts,系统开始运行的时刻为t=0,用矩形积分来近似精确积分,用差分近似精确微分,将式9-5离散化,第n次采样时控制器的输出为:
图9.11 连续闭环控制系统方框图 式9-5中等号右边前3项分别是比例、积分、微分部分,它们分别与误差、误差的积分和微分成正比。如果取其中的一项或两项,可以组成P、PD或PI控制器。 假设采样周期为Ts,系统开始运行的时刻为t=0,用矩形积分来近似精确积分,用差分近似精确微分,将式9-5离散化,第n次采样时控制器的输出为: ![]() (9-7)式中,en-1-第n-1次采样时的误差值。 KI-积分系数。 KD-微分系数。 基于PLC的闭环控制系统如图9.12所示,图中虚线部分在PLC内。图中的spn、pvn、en、Mn分别为模拟量sp(t)、pv(t)、e(t)、M(t)在第n次采样时的数字量。 在许多控制系统内,可能只需要P、I、D中的一种或两种控制类型。例如,可能只要求比例控制或比例与积分控制,通过设置参数可对回路控制类型进行选择。
(9-7)式中,en-1-第n-1次采样时的误差值。 KI-积分系数。 KD-微分系数。 基于PLC的闭环控制系统如图9.12所示,图中虚线部分在PLC内。图中的spn、pvn、en、Mn分别为模拟量sp(t)、pv(t)、e(t)、M(t)在第n次采样时的数字量。 在许多控制系统内,可能只需要P、I、D中的一种或两种控制类型。例如,可能只要求比例控制或比例与积分控制,通过设置参数可对回路控制类型进行选择。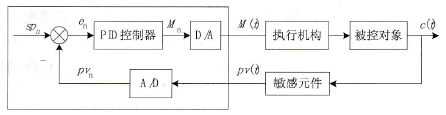 图9.12 PLC闭环控制系统方框图
图9.12 PLC闭环控制系统方框图

 PLC编程的基本规则
PLC编程的基本规则





