

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介虽然轿厢定位采用什么方法对电梯的控制原则不会发生什么影响,但 PIJC 程序的编制却大不一样,本节以某五层交流双速电梯为例介绍感应器定位电梯程序的编制要点,并说明 PLC 在电
虽然轿厢定位采用什么方法对电梯的控制原则不会发生什么影响,但PIJC程序的编制却大不一样,本节以某五层交流双速电梯为例介绍感应器定位电梯程序的编制要点,并说明PLC在电梯控制中的重要作用。 一、交流双速电梯的主电路及电器元件 1.主电路 图10-3是交流双速电梯的主电路图。图中M1为YTD系列电梯专用双速鼠笼型异步电动机(6/24极);KM1、KM2为电动机正反转接触器,用以实现电梯上、下行控制。KM3、KM4为电梯高低速运行接触器,用以实现电梯的高速或低速运行。KM5为起动加速接触器。KM6、KM7、KM8为减速制动接触器,用以调整电梯制动时的加速度。L1、L2与R1、R2为串入电动机定子电路中的电抗器与电阻器,与KM5~KM8配合实现对电机的加减速控制。当KM1或KM2与KM3通电吸合时,电梯将上行或下行起动,延时后KM5通电吸合,切除R1、L1,电梯转为上行或下行的稳速运行;当电梯接收到停层指令后,KM3断电释放,KM4通电吸合,电动机转为低速接法,串入阻抗制动,实现上升与下降的低速运行。且KM6~KM8依次通电吸合,用来控制制动过程的强度,提高停车制动时的舒适感。至平层位置时,接触器全部断电释放,抱闸抱死,电梯停止运行。在检修状态时,电梯只能在低速接法下点动运行。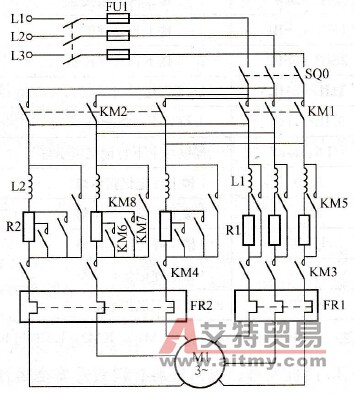 图10-3 交流双速电梯主电路 2.电气元件 为了方便对该电梯的工作原理及PLC控制系统进行分析,现列出该电梯的电气元件表如表10-1所示。 表10-1 5层5站电梯电气元件表
图10-3 交流双速电梯主电路 2.电气元件 为了方便对该电梯的工作原理及PLC控制系统进行分析,现列出该电梯的电气元件表如表10-1所示。 表10-1 5层5站电梯电气元件表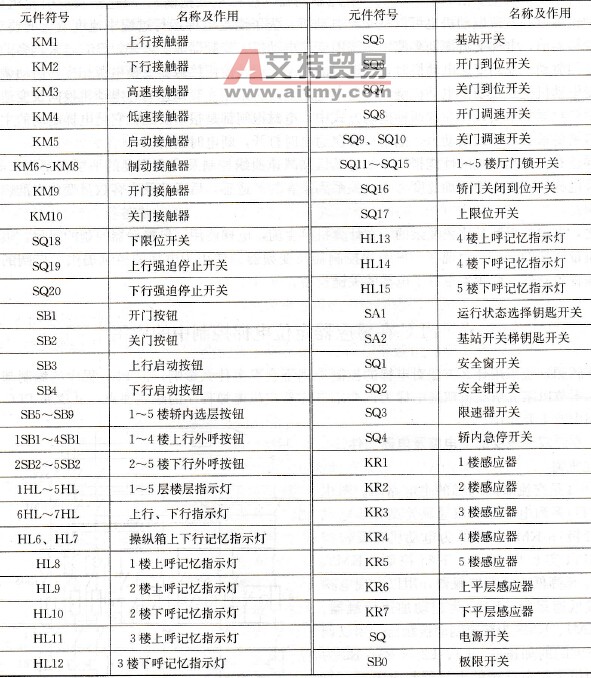 注根据电梯的特殊要求,KM1与KM2,KM9与KM10需选用带机械互锁的接触器。 3.门机电路、抱闸电路、门锁及安全运行电路 图10-4为电梯的门机、抱闸、门锁及安全运行电路。
注根据电梯的特殊要求,KM1与KM2,KM9与KM10需选用带机械互锁的接触器。 3.门机电路、抱闸电路、门锁及安全运行电路 图10-4为电梯的门机、抱闸、门锁及安全运行电路。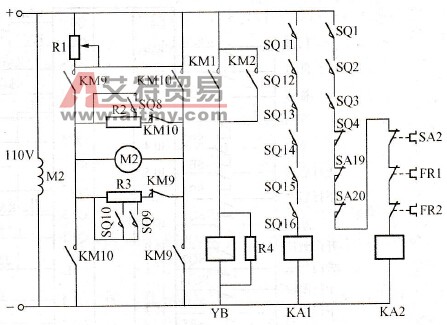 图10-4 门机、抱闸、门锁及安全运行电路 门电动机为他励直流电动机,可由KM9、KM10控制其正反转。KM9接通时,电阻R2与电动机电枢并联,电流由电枢左端流向右端,电动机正转实现开门,压下SQ8时,R2部分被短接,实现开门调速(减速)。KM10接通时,电动机将反转,实现关门,并由SQ9、SQ10与R3一起实现关门调速。 在电梯上、下行运行时,抱闸应打开,其线圈应通电。电梯停止运行时,抱闸应抱死,其线圈应断电,故可用KM1、KM2控制抱闸线圈YB的通电与断电。将所有厅、轿门开关串联在一起,控制门锁继电器KA1,实现全部门关闭正常后电梯才能运行的控制。这样即可以减少占用PLC的输入口,又便于检修。 将安全窗开关、安全钳开关、限速器开关、轿内急停开关、上下强迫停止开关、基站开关梯开关以及热继电器触点FR1、FR2串联在一起,构成安全回路,控制安全运行继电器KA2,用KA2的触点控制主电路的电源。这样可以节省PLC的输入口,又可以实现在多种紧急情况下的立即停车。 二、PLC的选型及输入、输出端口安排 通过清点需接入PLC的各类信号,可以计算出所需的输入、输出点数分别为32点和30点,故选择CPU226AC/DC/RELAY为主体单元,再扩展具有16点输入及16点输出的EM223单元构成控制系统。各输入输出端口的接线安排如图10-5所示。 三、梯形图的设计 梯形图的设计可以分成几个环节进行,然后再将这些环节组合在一起,形成完整的梯形图。 1.开关门环节 电梯的开关门存在以下几种情况: (1)电梯投入运行前的开门。此时电梯位于基站,将开关梯钥匙插入SA2内。旋转至开梯位置,电梯应自动开门,乘客或司机进入轿厢,选层后电梯自动运行。 (2)电梯检修时的开关门。检修状态下,开关门均为手动,由开关门按钮SB1、SB2实施开门与关门。 (3)电梯自动运行停层时的开门。电梯在停层时,至平层位置,控制用平层继电器M14.0(参考梯形图10-15)接通,电梯应开始开门。 (4)电梯关门过程中的重新开门。在电梯关门过程中,若有人或物夹在两门的中间,需重新开门。本例通过开门按钮实施重新开门。目前大多数电梯采用光幕或机械安全触板进行检测,自动发送重新开门信号,以达到重新开门的目的。 (5)呼梯开门。电梯到达某层站后,如果没有人继续使用电梯,电梯将停靠在该层站待命,若有人在该层站呼梯,电梯将立即开门,以满足用梯要求。若其他层站有人呼梯,电梯将首先定向,并起动运行,到达呼梯楼层时再开门,此时的开门按停层开门处理。
图10-4 门机、抱闸、门锁及安全运行电路 门电动机为他励直流电动机,可由KM9、KM10控制其正反转。KM9接通时,电阻R2与电动机电枢并联,电流由电枢左端流向右端,电动机正转实现开门,压下SQ8时,R2部分被短接,实现开门调速(减速)。KM10接通时,电动机将反转,实现关门,并由SQ9、SQ10与R3一起实现关门调速。 在电梯上、下行运行时,抱闸应打开,其线圈应通电。电梯停止运行时,抱闸应抱死,其线圈应断电,故可用KM1、KM2控制抱闸线圈YB的通电与断电。将所有厅、轿门开关串联在一起,控制门锁继电器KA1,实现全部门关闭正常后电梯才能运行的控制。这样即可以减少占用PLC的输入口,又便于检修。 将安全窗开关、安全钳开关、限速器开关、轿内急停开关、上下强迫停止开关、基站开关梯开关以及热继电器触点FR1、FR2串联在一起,构成安全回路,控制安全运行继电器KA2,用KA2的触点控制主电路的电源。这样可以节省PLC的输入口,又可以实现在多种紧急情况下的立即停车。 二、PLC的选型及输入、输出端口安排 通过清点需接入PLC的各类信号,可以计算出所需的输入、输出点数分别为32点和30点,故选择CPU226AC/DC/RELAY为主体单元,再扩展具有16点输入及16点输出的EM223单元构成控制系统。各输入输出端口的接线安排如图10-5所示。 三、梯形图的设计 梯形图的设计可以分成几个环节进行,然后再将这些环节组合在一起,形成完整的梯形图。 1.开关门环节 电梯的开关门存在以下几种情况: (1)电梯投入运行前的开门。此时电梯位于基站,将开关梯钥匙插入SA2内。旋转至开梯位置,电梯应自动开门,乘客或司机进入轿厢,选层后电梯自动运行。 (2)电梯检修时的开关门。检修状态下,开关门均为手动,由开关门按钮SB1、SB2实施开门与关门。 (3)电梯自动运行停层时的开门。电梯在停层时,至平层位置,控制用平层继电器M14.0(参考梯形图10-15)接通,电梯应开始开门。 (4)电梯关门过程中的重新开门。在电梯关门过程中,若有人或物夹在两门的中间,需重新开门。本例通过开门按钮实施重新开门。目前大多数电梯采用光幕或机械安全触板进行检测,自动发送重新开门信号,以达到重新开门的目的。 (5)呼梯开门。电梯到达某层站后,如果没有人继续使用电梯,电梯将停靠在该层站待命,若有人在该层站呼梯,电梯将立即开门,以满足用梯要求。若其他层站有人呼梯,电梯将首先定向,并起动运行,到达呼梯楼层时再开门,此时的开门按停层开门处理。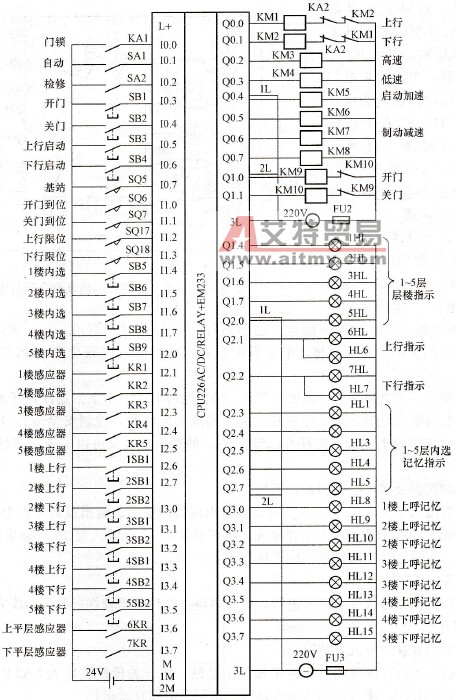 图10-5 5层电梯PLC接线图 开门环节的梯形图如图10-6所示,可与上述开门条款对照阅读。 (6)电梯停用后的关门。此时电梯到达基站,司机或乘客离开轿厢,电梯自动关门,司机将开、关梯钥匙插入SA2,旋转到关梯位置,电梯的安全回路被切断,PLC停止运行,电梯被关闭。 (7)电梯自动运行时的关门。停站时间继电器T50延时结束时,电梯应自动关门。停站时间未到时,可通过关门按钮实现提前关门。 考虑检修状态时的关门,则关门环节的梯形图如图10-7所示。
图10-5 5层电梯PLC接线图 开门环节的梯形图如图10-6所示,可与上述开门条款对照阅读。 (6)电梯停用后的关门。此时电梯到达基站,司机或乘客离开轿厢,电梯自动关门,司机将开、关梯钥匙插入SA2,旋转到关梯位置,电梯的安全回路被切断,PLC停止运行,电梯被关闭。 (7)电梯自动运行时的关门。停站时间继电器T50延时结束时,电梯应自动关门。停站时间未到时,可通过关门按钮实现提前关门。 考虑检修状态时的关门,则关门环节的梯形图如图10-7所示。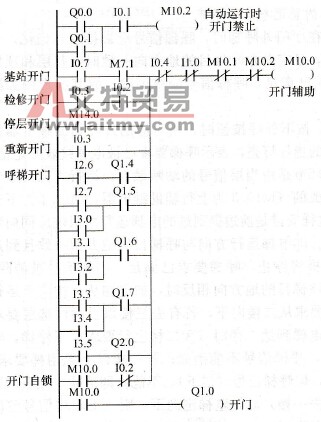 图10-6 开门环节梯形图
图10-6 开门环节梯形图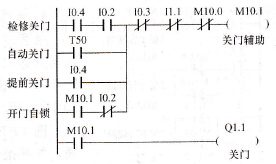 图10-7 关门环节梯形图 2.层楼信号的产生与清除环节 当电梯位于某一层时,指层感应器(图10-2中KR1~KR5)产生该楼层的信号,以控制楼层指示灯的状态,离开该层时,该楼层信号应被新的楼层信号(上一层或下一层)所取代。其梯形图如图10-8所示。图中当层的层楼辅助继电器是用上层或下层的层楼信号关断的。 3.停层信号的登记与消除环节 乘客或司机通过对轿厢内操纵盘上1~5层选层按钮的操作,可以选择欲去的楼层。选层信号被登记后,选层按钮下的指示灯亮。当电梯到达所选的楼层后,停层信号即被消除,指示灯也应熄灭。其梯形图如图10-9所示,图中各内选层辅助继电器梯形图支路中串入了层楼辅助继电器的动断触点。
图10-7 关门环节梯形图 2.层楼信号的产生与清除环节 当电梯位于某一层时,指层感应器(图10-2中KR1~KR5)产生该楼层的信号,以控制楼层指示灯的状态,离开该层时,该楼层信号应被新的楼层信号(上一层或下一层)所取代。其梯形图如图10-8所示。图中当层的层楼辅助继电器是用上层或下层的层楼信号关断的。 3.停层信号的登记与消除环节 乘客或司机通过对轿厢内操纵盘上1~5层选层按钮的操作,可以选择欲去的楼层。选层信号被登记后,选层按钮下的指示灯亮。当电梯到达所选的楼层后,停层信号即被消除,指示灯也应熄灭。其梯形图如图10-9所示,图中各内选层辅助继电器梯形图支路中串入了层楼辅助继电器的动断触点。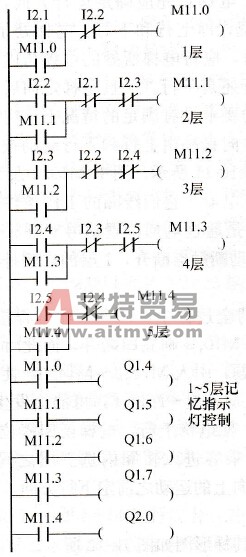 图10-8 层楼信号产生与消除环节梯形图
图10-8 层楼信号产生与消除环节梯形图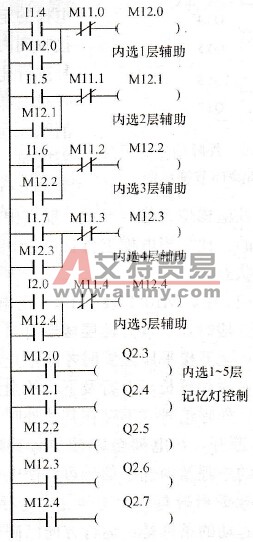 图10-9 停层信号登记与消除环节梯形图 4.外呼信号的登记与消除环节 乘客或司机在厅门外呼梯时,呼梯信号应被接收和记忆。当电梯到达该楼层,且定向方向与目的地方向一致时(基层和顶层除外),呼梯要求已满足,呼梯信号应被消除。故其梯形图如图10-10所示。
图10-9 停层信号登记与消除环节梯形图 4.外呼信号的登记与消除环节 乘客或司机在厅门外呼梯时,呼梯信号应被接收和记忆。当电梯到达该楼层,且定向方向与目的地方向一致时(基层和顶层除外),呼梯要求已满足,呼梯信号应被消除。故其梯形图如图10-10所示。 图10-10 外呼信号登记与消除环节梯形图 图10-10中,按下外呼按钮时,相对应的外呼辅助继电器接通,外呼按钮下的指标灯亮,表示呼梯要求已被电梯接收并记忆。而该信号的消除环节是由当层信号的动断触点与运行方向信号的动断触点并联构成的(M10.3为上行辅助继电器,M10.4为下行辅助继电器)。这样安排是前边提到过的电梯运行中只响应同向呼梯的原则决定的。即电梯运行方向与呼梯目的地方向一致且到达呼梯楼层时,电梯将停止,呼梯要求已满足,呼梯信号被消除。电梯运行方向与呼梯目的地方向相反时,如电梯从一楼向上运行(上行),而呼梯要求从二楼向下,若有去三楼以上的内选层要求及外呼梯要求,电梯到达二楼时(无二楼上行要求)不停梯,呼梯要求没有满足,呼梯信号不能消除;若三楼以上无用梯要求,电梯将停在二楼,但呼梯信号(二下),不能立即消除,待乘客进入轿厢,选层(去一楼)后,电梯定向下,则二下呼梯信号已满足,呼梯信号被消除。 5.电梯的定向环节 在自动运行状态下,电梯首先应确定运行方向,也即定向。电梯的定向只有两种情况,即上行和下行。电梯处于待命状态,接收到内选和外呼信号时,应将电梯所处的位置与内选和外呼信号进行比较,确定是上行还是下行。一旦电梯定向后,内选与外呼对电梯进行顺向运行的要求没有满足的情况下,定向信号不能消除。检修状态下运行方向直接由上行和下行起动按钮确定,不需定向,故其梯形图如图10-11所示。图中M10.3及M10.4分别为定上行及定下行辅助继电器,它们线圈的工作条件触点块由内外呼信号及电梯位置信号组成,前文中所说的“比较”是通过电梯位置信号对呼梯信号的“屏蔽”实现的,比如当电梯上行且位于2层时,M11.1的动断触点断开,1层的内呼外唤都不再能影响上行状态。 图10-11中,M10.3及M10.4在电梯上行及下行的全过程中,存在不能全程接通的情况,如上行至五楼时,一旦五楼层楼继电器M11.4接通时,M10.3则立即断开,而此时电梯仍处于上行状态,至五楼平层位置时才能停止。为解决这一问题,引入M14.3~M14.6,使上行与下行继电器接通时间延长至上行及下行的全过程。若不使用M14.3~M14.6,可能会发生下述情况:四楼向上的外呼信号(不存在其他外呼及内选层信号),使电梯上行,电梯至四楼位置,M11.3使M10.3断开,在电梯至四楼位置到电梯停层开门,乘客进入轿厢内选五层之间的时间内,一~三楼的外呼及内选层信号可以使电梯在未完成四楼向上的运动之前定下行方向。 6.自动运行时起动加速和稳定运行环节 电梯起动的条件是:运行方向已确定,门已关好。其梯形图如图10-12所示。 上述梯形图只考虑接触器的通电,而未考虑其断电与互锁等问题。
图10-10 外呼信号登记与消除环节梯形图 图10-10中,按下外呼按钮时,相对应的外呼辅助继电器接通,外呼按钮下的指标灯亮,表示呼梯要求已被电梯接收并记忆。而该信号的消除环节是由当层信号的动断触点与运行方向信号的动断触点并联构成的(M10.3为上行辅助继电器,M10.4为下行辅助继电器)。这样安排是前边提到过的电梯运行中只响应同向呼梯的原则决定的。即电梯运行方向与呼梯目的地方向一致且到达呼梯楼层时,电梯将停止,呼梯要求已满足,呼梯信号被消除。电梯运行方向与呼梯目的地方向相反时,如电梯从一楼向上运行(上行),而呼梯要求从二楼向下,若有去三楼以上的内选层要求及外呼梯要求,电梯到达二楼时(无二楼上行要求)不停梯,呼梯要求没有满足,呼梯信号不能消除;若三楼以上无用梯要求,电梯将停在二楼,但呼梯信号(二下),不能立即消除,待乘客进入轿厢,选层(去一楼)后,电梯定向下,则二下呼梯信号已满足,呼梯信号被消除。 5.电梯的定向环节 在自动运行状态下,电梯首先应确定运行方向,也即定向。电梯的定向只有两种情况,即上行和下行。电梯处于待命状态,接收到内选和外呼信号时,应将电梯所处的位置与内选和外呼信号进行比较,确定是上行还是下行。一旦电梯定向后,内选与外呼对电梯进行顺向运行的要求没有满足的情况下,定向信号不能消除。检修状态下运行方向直接由上行和下行起动按钮确定,不需定向,故其梯形图如图10-11所示。图中M10.3及M10.4分别为定上行及定下行辅助继电器,它们线圈的工作条件触点块由内外呼信号及电梯位置信号组成,前文中所说的“比较”是通过电梯位置信号对呼梯信号的“屏蔽”实现的,比如当电梯上行且位于2层时,M11.1的动断触点断开,1层的内呼外唤都不再能影响上行状态。 图10-11中,M10.3及M10.4在电梯上行及下行的全过程中,存在不能全程接通的情况,如上行至五楼时,一旦五楼层楼继电器M11.4接通时,M10.3则立即断开,而此时电梯仍处于上行状态,至五楼平层位置时才能停止。为解决这一问题,引入M14.3~M14.6,使上行与下行继电器接通时间延长至上行及下行的全过程。若不使用M14.3~M14.6,可能会发生下述情况:四楼向上的外呼信号(不存在其他外呼及内选层信号),使电梯上行,电梯至四楼位置,M11.3使M10.3断开,在电梯至四楼位置到电梯停层开门,乘客进入轿厢内选五层之间的时间内,一~三楼的外呼及内选层信号可以使电梯在未完成四楼向上的运动之前定下行方向。 6.自动运行时起动加速和稳定运行环节 电梯起动的条件是:运行方向已确定,门已关好。其梯形图如图10-12所示。 上述梯形图只考虑接触器的通电,而未考虑其断电与互锁等问题。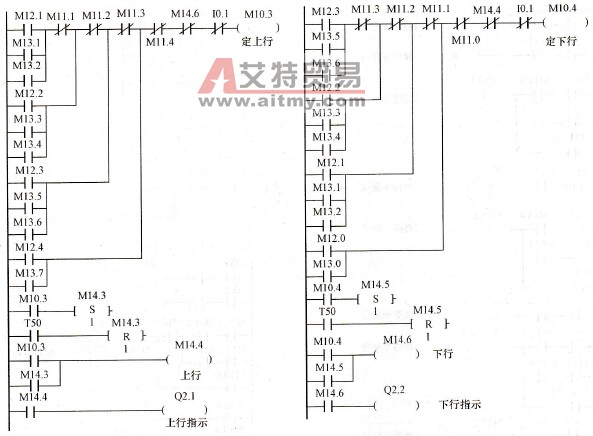 图10-11 定向环节梯形图 7.停车制动环节 电梯在停车制动之前,应首先确定楼层信号,即确定要停靠的楼层。应根据电梯的运行方向结合外呼信号和轿内选层信号比较后得出。其梯形图如图10-13所示。图中,各层的停车触发信号在下行下呼,上行上呼及内选层信号存在时产生,这些都是符合前边所谈到的停车原则的。当存在触发信号电梯又运行到当层时产生停车信号。停车信号M10.5梯形图支路中M10.3、M10.4动断触点的作用是为了解决呼梯方向与电梯运行方向相反时的停车问题(如二楼向下的外呼信号,使电梯从一楼向上运行时,M15.1不会被触发,至二楼位置,靠M10.3、M10.4的动断触点使M10.5接通)而设置的。而停车信号的消除是停车时间到,T50为停层时间定时器。 停层信号产生后,与上下平层感应器配合,进行停车制动。停车制动之前,应先产生停车制动信号,然后由停车制动信号控制接触器实现停车制动。为解决电梯进入平层区间后才出现停车信号致使电梯过急停车的问题,采用微分指令将I3.6及I3.7变成短信号。其梯形图如图10-14所示。
图10-11 定向环节梯形图 7.停车制动环节 电梯在停车制动之前,应首先确定楼层信号,即确定要停靠的楼层。应根据电梯的运行方向结合外呼信号和轿内选层信号比较后得出。其梯形图如图10-13所示。图中,各层的停车触发信号在下行下呼,上行上呼及内选层信号存在时产生,这些都是符合前边所谈到的停车原则的。当存在触发信号电梯又运行到当层时产生停车信号。停车信号M10.5梯形图支路中M10.3、M10.4动断触点的作用是为了解决呼梯方向与电梯运行方向相反时的停车问题(如二楼向下的外呼信号,使电梯从一楼向上运行时,M15.1不会被触发,至二楼位置,靠M10.3、M10.4的动断触点使M10.5接通)而设置的。而停车信号的消除是停车时间到,T50为停层时间定时器。 停层信号产生后,与上下平层感应器配合,进行停车制动。停车制动之前,应先产生停车制动信号,然后由停车制动信号控制接触器实现停车制动。为解决电梯进入平层区间后才出现停车信号致使电梯过急停车的问题,采用微分指令将I3.6及I3.7变成短信号。其梯形图如图10-14所示。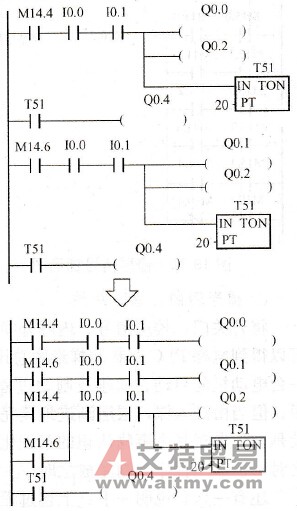 图10-12 起动加速和稳定运行环节梯形图 将图10-12~图10-14进行综合,并考虑电梯在检修状态下的运行情况,以及限位保护等问题,可以得到电梯起动加速、稳速运行、停车制动的梯形图,如图10-15所示。
图10-12 起动加速和稳定运行环节梯形图 将图10-12~图10-14进行综合,并考虑电梯在检修状态下的运行情况,以及限位保护等问题,可以得到电梯起动加速、稳速运行、停车制动的梯形图,如图10-15所示。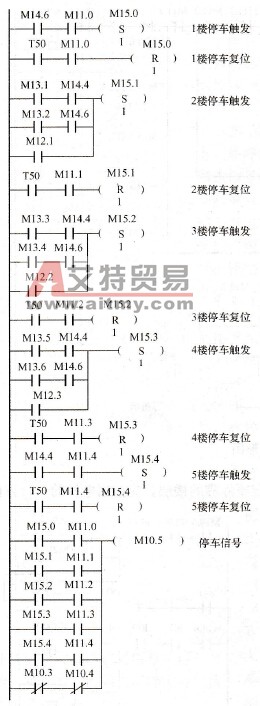 图10-13 停层信号梯形图
图10-13 停层信号梯形图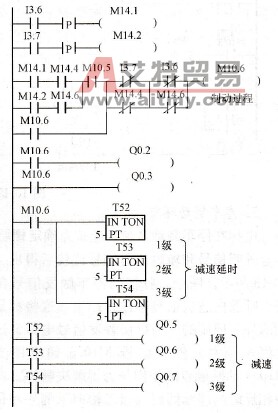 图10-14 制动过程梯形图 8.梯形图的汇总及总结 将开关门、楼层信号、内呼外唤、上行下行、停层、电动机控制等局部梯形图拼在一起,就可以得到电梯PLC控制的梯形图总图,在这儿就不再列出了。说起来电梯的控制只不过是控制一台电动机的启动、加速及制动过程,可控制的条件却十分复杂,刚接触时还真不知从哪儿下手。但当由浅入深,层层渐进地读完以上的程序,又可能会觉得并不是太难。其实,编程的过程就是编程者对某个事物认识的条理化过程。当对所编程序涉及的事物之间的联系及制约了解透彻之时,也就是程序编制完成之时。 还有一点要说明一下:上述过程以分析电梯的各种逻辑关系为主,与实际中电梯控制之间还存在一定的差距。没有考虑在机房及轿厢顶部对电梯进行检修的问题,电梯的消防功能等。
图10-14 制动过程梯形图 8.梯形图的汇总及总结 将开关门、楼层信号、内呼外唤、上行下行、停层、电动机控制等局部梯形图拼在一起,就可以得到电梯PLC控制的梯形图总图,在这儿就不再列出了。说起来电梯的控制只不过是控制一台电动机的启动、加速及制动过程,可控制的条件却十分复杂,刚接触时还真不知从哪儿下手。但当由浅入深,层层渐进地读完以上的程序,又可能会觉得并不是太难。其实,编程的过程就是编程者对某个事物认识的条理化过程。当对所编程序涉及的事物之间的联系及制约了解透彻之时,也就是程序编制完成之时。 还有一点要说明一下:上述过程以分析电梯的各种逻辑关系为主,与实际中电梯控制之间还存在一定的差距。没有考虑在机房及轿厢顶部对电梯进行检修的问题,电梯的消防功能等。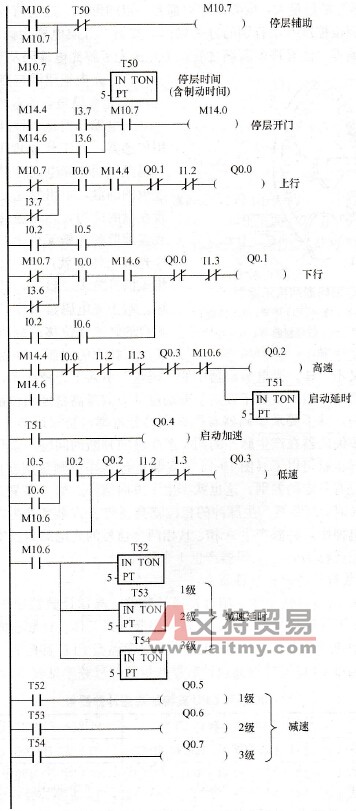 图10-15 启动、稳速运行、制动减速环节梯形图
图10-15 启动、稳速运行、制动减速环节梯形图

 PLC编程的基本规则
PLC编程的基本规则





