

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介信捷 XC3 系列 PLC 具有 2 路高速脉冲输出,其输出频率最高可达 400kHz ,本节介绍用 PLSR 指令实现的多段速双向脉冲输出,它能更好地适应实际的控制要求。 1 . 功能要求 (1) 系统设置自
信捷XC3系列PLC具有2路高速脉冲输出,其输出频率最高可达400kHz,本节介绍用PLSR指令实现的多段速双向脉冲输出,它能更好地适应实际的控制要求。 1.功能要求 (1)系统设置自动和手动两种工作方式,用信捷PLC和DSP-5230三相步进驱动器控制三相步进电机,也要求按图7.11所示来回运动,但前进时可按4种不同的段速变速前进。 (2)设计如图7.17所示的文本显示器人机界面。通过主画面(a)可以跳转到手动画面(b)和自动画面(c),在画面(b)和(c)中分别可以手动或自动启动电机前进和返回,同时显示当前的脉冲段段号和累计脉冲数。 图7.17 多段速脉冲输出文本显示器人机界面 (3)按信捷DSP-5230驱动器说明书,DSP-5230能驱动输入电压为300VDC或220VAC、电流在5.2A以下的各种三相混合式步进电机(如90、110、130型),适合要求高定位精度、低速平稳运行的自动化设备。本例选用的是110型三相混合式步进电机,型号为110BYG350C,步距为0.6°/1.2°,电压为80~300V,电流为3A,保持转距18N·m,重量达10kg以上。 2.PLC与文本显示器选型及存储分配 输出信号只有两个,其地址分配和相关信息如表7. 17所示。PLC选择信捷XC3-18RT-E型,属于XC系列的标准机型,为继电器和晶体管混合输出,上面提到的两路高速脉冲输出Y0、Y1为晶体管输出。 表7.17 步进电机控制输出信号及地址分配
图7.17 多段速脉冲输出文本显示器人机界面 (3)按信捷DSP-5230驱动器说明书,DSP-5230能驱动输入电压为300VDC或220VAC、电流在5.2A以下的各种三相混合式步进电机(如90、110、130型),适合要求高定位精度、低速平稳运行的自动化设备。本例选用的是110型三相混合式步进电机,型号为110BYG350C,步距为0.6°/1.2°,电压为80~300V,电流为3A,保持转距18N·m,重量达10kg以上。 2.PLC与文本显示器选型及存储分配 输出信号只有两个,其地址分配和相关信息如表7. 17所示。PLC选择信捷XC3-18RT-E型,属于XC系列的标准机型,为继电器和晶体管混合输出,上面提到的两路高速脉冲输出Y0、Y1为晶体管输出。 表7.17 步进电机控制输出信号及地址分配 根据图7. 17画面选择信捷可编程文本显示器OP320-A-S( DC24V,3W),它能显示12汉字×4行。图7. 17各画面中相应部件的存储分配与属性分别如表7.18~表7.22所示,按照这些表中的数据,用信捷“OP20系列画面设置工具”(V6.5n),就可以画出图7. 17的人机界面了。 表7. 18 图7.17(a)人机界面中功能键存储分配与属性
根据图7. 17画面选择信捷可编程文本显示器OP320-A-S( DC24V,3W),它能显示12汉字×4行。图7. 17各画面中相应部件的存储分配与属性分别如表7.18~表7.22所示,按照这些表中的数据,用信捷“OP20系列画面设置工具”(V6.5n),就可以画出图7. 17的人机界面了。 表7. 18 图7.17(a)人机界面中功能键存储分配与属性 表7. 19 图7.17 (b)人机界面中功能键存储分配与属性
表7. 19 图7.17 (b)人机界面中功能键存储分配与属性 表7. 20 图7.17(b)人机界面中数据显示窗存储分配与属性
表7. 20 图7.17(b)人机界面中数据显示窗存储分配与属性 表7. 21 图7.17(c)人机界面中功能键存储分配与属性
表7. 21 图7.17(c)人机界面中功能键存储分配与属性 表7. 22 图7.17(c)人机界面中数据显示窗存储分配与属性
表7. 22 图7.17(c)人机界面中数据显示窗存储分配与属性 3.梯形图程序设计 多段速脉冲输出控制三相步进电机采用状态编程,其状态梯形图如图7. 18所示,读者可以结合注释来阅读。下面对程序设计中的算法和相关知识作如下说明。
3.梯形图程序设计 多段速脉冲输出控制三相步进电机采用状态编程,其状态梯形图如图7. 18所示,读者可以结合注释来阅读。下面对程序设计中的算法和相关知识作如下说明。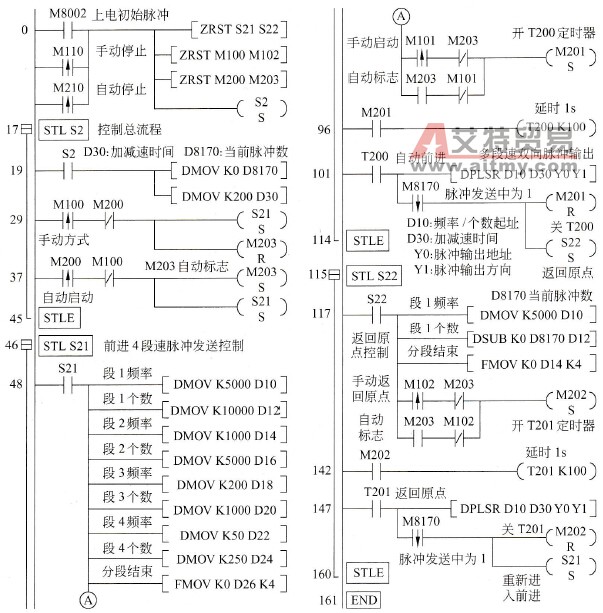 图7.18 信捷PLC多段速脉冲输出控制步进梯形图 (1)状态表 多段速双向脉冲输出控制的状态表如表7. 23所示。S2为总流程控制初始状态。可以通过手动和自动按钮转移到S21状态,Y0输出脉冲,Y1输出脉冲方向,驱动步进电机按4段速前进;通过M8170标志可转移到S22状态,Y0输出脉冲,Y1输出脉冲方向,驱动步进电机返回原点。此后,M8170标志又将控制状态转移到S2,从而控制步进电机在前进与返回两个工步之间循环运动。 表7.23 多段速双向脉冲输出控制的状态表
图7.18 信捷PLC多段速脉冲输出控制步进梯形图 (1)状态表 多段速双向脉冲输出控制的状态表如表7. 23所示。S2为总流程控制初始状态。可以通过手动和自动按钮转移到S21状态,Y0输出脉冲,Y1输出脉冲方向,驱动步进电机按4段速前进;通过M8170标志可转移到S22状态,Y0输出脉冲,Y1输出脉冲方向,驱动步进电机返回原点。此后,M8170标志又将控制状态转移到S2,从而控制步进电机在前进与返回两个工步之间循环运动。 表7.23 多段速双向脉冲输出控制的状态表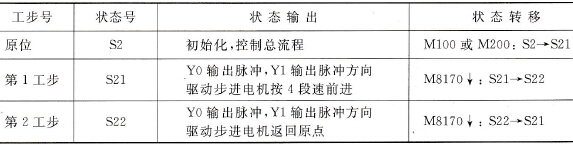 (2)带加减速脉冲输出指令 信捷PLSR指令除兼容三菱的FNC59脉冲输出指令外,还扩展了另外两种控制模式。本案例中介绍的是最具特色的多段速双向脉冲输出控制模式,它是以指定的频率、加减速时间和脉冲方向分段产生定量脉冲。下面以图7. 19示例梯形图(即图7.18中101梯级处这条32位脉冲输出指令)和图7. 18中设定的相关脉冲参数为例,进行说明。
(2)带加减速脉冲输出指令 信捷PLSR指令除兼容三菱的FNC59脉冲输出指令外,还扩展了另外两种控制模式。本案例中介绍的是最具特色的多段速双向脉冲输出控制模式,它是以指定的频率、加减速时间和脉冲方向分段产生定量脉冲。下面以图7. 19示例梯形图(即图7.18中101梯级处这条32位脉冲输出指令)和图7. 18中设定的相关脉冲参数为例,进行说明。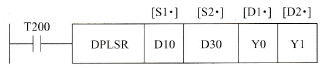 图7. 19 多段速双向脉冲输出指令示例 [S1·]为设置脉冲输出参数的数据寄存器区域的起始地址。示例中D10、D11设定第1段脉冲的最高频率,D12、D13设定第1段脉冲的个数;D14、D15设定第2段脉冲的最高频率,D16、D17设定第2段脉冲的个数;以此类推,最多可设定24段,当遇到Dn、Dn+1的值都为0时,表示分段结束。示例梯形图中[S1·]的取值为图7.18梯形图中48步梯级处所设定的值,总共设定4段,如表7. 24所示。 表7. 24 图7.19中[S1·]的设定
图7. 19 多段速双向脉冲输出指令示例 [S1·]为设置脉冲输出参数的数据寄存器区域的起始地址。示例中D10、D11设定第1段脉冲的最高频率,D12、D13设定第1段脉冲的个数;D14、D15设定第2段脉冲的最高频率,D16、D17设定第2段脉冲的个数;以此类推,最多可设定24段,当遇到Dn、Dn+1的值都为0时,表示分段结束。示例梯形图中[S1·]的取值为图7.18梯形图中48步梯级处所设定的值,总共设定4段,如表7. 24所示。 表7. 24 图7.19中[S1·]的设定![图7.19中[S1·]的设定](http://www.a766.com/pic/plc/10-33-23-66-1.jpg) [S2·]为加减速时间,指从开始到第一段最高频率的加速时间,这一调速斜率也将是其余段的加减速率。可用操作数为十进制常数K和各类数据寄存器。示例梯形图中[S2·]的取值为图7. 18梯形图中19步梯级处所设定的值,即D30=200ms。 [D1·]为脉冲输出的Y地址,只限Y0或Y1。本例中取Y0。 [D2·]为脉冲输出方向的Y地址,可以任意指定。在一次多段速脉冲输出中,当[S1·]中第一段设定的脉冲个数为正时,脉冲方向为ON;而当设定的脉冲个数为负时,脉冲方向为OFF。这一脉冲方向的设定也将是其余各段的脉冲方向。本例中取Y1。 在图7. 19中,当T200接通时,Y0将先后按照表7.24指定的各段频率,以200ms为加减速时间,分段输出指定的定量脉冲,脉冲方向信息由Y1输出,可用于驱动步进电机。 (3)步进电机的计算 由于DSP-5230设计时把方波改为三相正弦波驱动,所以步进电机步距角要按1.8°/步估算。若细分数等于10,按上节介绍的计算方法,可算出其转一圈的脉冲数为2000。对应表7. 24中各段的脉冲数步进电机的圈数如表7.25所示。 表7. 25 对应表7.24中各段的脉冲数步进电机的转数
[S2·]为加减速时间,指从开始到第一段最高频率的加速时间,这一调速斜率也将是其余段的加减速率。可用操作数为十进制常数K和各类数据寄存器。示例梯形图中[S2·]的取值为图7. 18梯形图中19步梯级处所设定的值,即D30=200ms。 [D1·]为脉冲输出的Y地址,只限Y0或Y1。本例中取Y0。 [D2·]为脉冲输出方向的Y地址,可以任意指定。在一次多段速脉冲输出中,当[S1·]中第一段设定的脉冲个数为正时,脉冲方向为ON;而当设定的脉冲个数为负时,脉冲方向为OFF。这一脉冲方向的设定也将是其余各段的脉冲方向。本例中取Y1。 在图7. 19中,当T200接通时,Y0将先后按照表7.24指定的各段频率,以200ms为加减速时间,分段输出指定的定量脉冲,脉冲方向信息由Y1输出,可用于驱动步进电机。 (3)步进电机的计算 由于DSP-5230设计时把方波改为三相正弦波驱动,所以步进电机步距角要按1.8°/步估算。若细分数等于10,按上节介绍的计算方法,可算出其转一圈的脉冲数为2000。对应表7. 24中各段的脉冲数步进电机的圈数如表7.25所示。 表7. 25 对应表7.24中各段的脉冲数步进电机的转数 (4)手动和自动的工作过程 上电后M8002接通一个扫描周期,对系统进行初始化,同时置状态S2 =1。文本显示器上出现主画面,用到的功能键定义见表7.18~表7.22。 ①S2状态:设置加减速时间为200ms,把Y0脉冲当前值寄存器D8170清0。在文本显示器的主画面,如果触按SET键,M100常开瞬时ON,进人手动方式(触按“↑”键可跳转至手动画面);如果触按“↓”键,跳转至自动画面后,触按ENT键,M200常开瞬时ON,置自动标志M203 =1。手动和自动是互锁的,在状态最后均将置状态S21=1。 ②S21状态:按表7.24设置4段速脉冲输出各段的频率和脉冲数。在手动画面触按“→”键,M101常开瞬时ON,进入手动启动,M201置1,开T200定时器,延时1s后,按图7. 19中说明启动手动前进。如果在S21已置M203 =1,则会启动自动前进。在脉冲发送中标志M8170的下降沿,复位M201,关T200定时器,电机前进停止,最后置状态S22 =1。 ③S22状态:设置返回原点时的频率和脉冲数(D10和D30)。在手动画面触按返回原点“←”键,M102常开瞬时ON,M202置1,开T201定时器,延时1s后,按5000Hz频率返回原点。如果在S21已置M203 =1,则会启动自动返回原点。在M8170脉冲发送中标志的下降沿,复位M202,关T201定时器,电机到原点停止。最后置状态S21=1。在自动方式,又将循环执行电机自动前进,在手动方式需要触按前进功能键。 在手动或自动画面中,分别触按ESC键,M110或M210常开瞬时ON,将停止步进电机运转。 4.接线图 多段速脉冲输出接线图如图7. 20所示。其中,信捷XC3-48RT-E是AC电源型,电压允许范围为AC90~265V,它与文本显示器OP320-A-S之间仍然可以用DVP连接线(即与PC连接的那根通信电缆)连接。 信捷DSP-5230为三相高精度步进驱动器,适用各种要求高定位精度、低速平稳运行的自动化设备中,如雕刻机、数控机床、切割机等。同DSP-565一样,它有控制信号接口、强电接口和8个微型拨动开关SW1~SW8,其外形如图7.21所示。它的控制信号接口的连接与上面介绍的DSP-565一样,不再重复说明。它的强电接口用于同供电电源和步进电机连接,只要把驱动器的A、B、C输出端分别和步进电机三相线圈输出端1、3、5对应相连即可(不管三相线圈是星接还是角接)。它的供电电压为AC50~220V或DC70~300V,本案例中采用AC供电。
(4)手动和自动的工作过程 上电后M8002接通一个扫描周期,对系统进行初始化,同时置状态S2 =1。文本显示器上出现主画面,用到的功能键定义见表7.18~表7.22。 ①S2状态:设置加减速时间为200ms,把Y0脉冲当前值寄存器D8170清0。在文本显示器的主画面,如果触按SET键,M100常开瞬时ON,进人手动方式(触按“↑”键可跳转至手动画面);如果触按“↓”键,跳转至自动画面后,触按ENT键,M200常开瞬时ON,置自动标志M203 =1。手动和自动是互锁的,在状态最后均将置状态S21=1。 ②S21状态:按表7.24设置4段速脉冲输出各段的频率和脉冲数。在手动画面触按“→”键,M101常开瞬时ON,进入手动启动,M201置1,开T200定时器,延时1s后,按图7. 19中说明启动手动前进。如果在S21已置M203 =1,则会启动自动前进。在脉冲发送中标志M8170的下降沿,复位M201,关T200定时器,电机前进停止,最后置状态S22 =1。 ③S22状态:设置返回原点时的频率和脉冲数(D10和D30)。在手动画面触按返回原点“←”键,M102常开瞬时ON,M202置1,开T201定时器,延时1s后,按5000Hz频率返回原点。如果在S21已置M203 =1,则会启动自动返回原点。在M8170脉冲发送中标志的下降沿,复位M202,关T201定时器,电机到原点停止。最后置状态S21=1。在自动方式,又将循环执行电机自动前进,在手动方式需要触按前进功能键。 在手动或自动画面中,分别触按ESC键,M110或M210常开瞬时ON,将停止步进电机运转。 4.接线图 多段速脉冲输出接线图如图7. 20所示。其中,信捷XC3-48RT-E是AC电源型,电压允许范围为AC90~265V,它与文本显示器OP320-A-S之间仍然可以用DVP连接线(即与PC连接的那根通信电缆)连接。 信捷DSP-5230为三相高精度步进驱动器,适用各种要求高定位精度、低速平稳运行的自动化设备中,如雕刻机、数控机床、切割机等。同DSP-565一样,它有控制信号接口、强电接口和8个微型拨动开关SW1~SW8,其外形如图7.21所示。它的控制信号接口的连接与上面介绍的DSP-565一样,不再重复说明。它的强电接口用于同供电电源和步进电机连接,只要把驱动器的A、B、C输出端分别和步进电机三相线圈输出端1、3、5对应相连即可(不管三相线圈是星接还是角接)。它的供电电压为AC50~220V或DC70~300V,本案例中采用AC供电。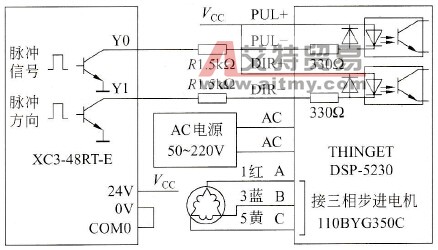 图7.20 信捷多段速双向脉冲输出接线图
图7.20 信捷多段速双向脉冲输出接线图 图7.21 DSP-5230 DSP-5230细分动态可调范围为2~128,用SW5~SW8可设定15挡细分值,SW1~SW3可设定8挡电流值;还可用SW4设定全流和半流。本例为空载试验,SW4为OFF(半流工作状态),电流设定为2. 8A。表7.26是本例中对SW1~SW8的设定。 表7.26 图7.19中[S1·]的设定
图7.21 DSP-5230 DSP-5230细分动态可调范围为2~128,用SW5~SW8可设定15挡细分值,SW1~SW3可设定8挡电流值;还可用SW4设定全流和半流。本例为空载试验,SW4为OFF(半流工作状态),电流设定为2. 8A。表7.26是本例中对SW1~SW8的设定。 表7.26 图7.19中[S1·]的设定![图7.19中[S1·]的设定](http://www.a766.com/pic/plc/10-35-00-66-1.jpg)

 PLC编程的基本规则
PLC编程的基本规则





