

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介当司机驾驶汽车时,司机通过眼睛(反馈)观察实际路线和预期的路线是否相符,当两者有差异(偏差)时,司机(控制器)通过经验的判断,转动方向盘。方向盘通过液压放大器控制
当司机驾驶汽车时,司机通过眼睛(反馈)观察实际路线和预期的路线是否相符,当两者有差异(偏差)时,司机(控制器)通过经验的判断,转动方向盘。方向盘通过液压放大器控制汽车轮子的转向(执行机构)来控制汽车的运行方向,使汽车的实际运行方向和预期的行驶方向基本相同,这就是控制器的控制思路和理念。
控制系统通常采用精密的传感器测量的值作为实际输出值,把预期的给定输出与实际输出的值作为偏差,利用控制装置对偏差进行处理,用处理的结果驱动执行机构工作,通过不断地改变受控对象的状态,来逐步减小偏差,从而使所驱动的执行机构在工作时达到和接近预期的理想状态。
PID是非常重要的一种控制器,在工业生产过程中得到了广泛的应用,一方面是由于PID控制器能在各种不同的工作条件下都能保持较好的工作性能;另一方面,也是由于PID的控制器功能相对简单,使用方便。例如:可以利用PID的控制原理控制风门的开度来控制风量的大小。
PID控制器在实际应用中常常采用比例、积分、微分等基本控制规律,或者采用这些基本控制规律的某些组合,如比例一积分、比例一微分、比例一积分一微分等组合控制规律。
PID中的P(Proportional)代表比例控制,I(Integral)代表积分控制,D(Derivative)代表微分控制。
PID控制器必须确定比例增益、积分增益和微分增益这三个参数。
图1-1的PID原理图详细说明了PID的控制过程。
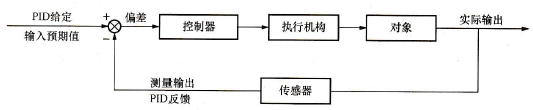
图1-1 PID控制原理图
一、比例(P)控制
比例控制是一种最简单的控制方式,其控制器的输出与PID给定值与反馈值的偏差信号成比例关系。系统一旦出现了偏差,比例调节控制就立即产生调节作用以减少偏差。对于同样的偏差,比例系数越大,控制器的输出也越大。需要注意的是过大的比例,会使系统的稳定性下降,甚至造成系统的不稳定。当仅有比例控制时,一般只能减小偏差而不能消除偏差,系统输出一般存在稳态误差。
也就是说,PID的控制功能是建立在比例P的基础上的,P是负反馈控制的放大倍数,负反馈控制是放大器,放大器的输出通过反馈电路进入之后跟输入的设定值进行比较。因为是负反馈,所以它是一个差值,用这个差值来控制输出量的变化,从而达到控制的目的。
二、积分(I)控制
在积分控制中,控制器的输出与偏差信号的积分成正比关系。对一个自动控制系统而言,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统( System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大,使稳态误差进一步减小,直到等于零。加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。在PID控制中,如果负反馈控制的P放大的倍数太大,就会超调振荡,负反馈出来的值跟设定的信号值,这两个值的信号方向是相反的,如果说当设定值和负反馈值差不多的时候差值就会等于零,等于零后放大出来后会振荡得很厉害。而PID就是负反馈的改进,利用积分来一点一点加快减小静差的速度,但是有一个前提,P要适当,当输出在有限范围内振荡,P就可以了。而后加I,I加进去后一定会减小这个摆动。摆动会越来越小,最后趋于稳定。一般来讲,I的单位如果是时间,那么时间越短,积分的控制作用越强,积分作用太强同样可导致振荡。如果是积分系数,那么一般是系数越大,积分作用越强,调试时要注意这一点。
三、微分(D)控制
在微分控制中,控制器的输出与偏差信号的微分(即误差的变化率)成正比关系。微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。“微分项”的作用能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。此外,微分反映的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。在一般的控制中,微分D加不加都没有太大的关系。经验表明,在起动的时候如果升得太快就要加D,D可以抑制它一下子升上去,另外一种情况就是加了P和I的时候还是有振荡,这个时候可以适当的加点微分D进去。
在过程控制领域的工程应用中,既可以使用PLC的PID功能,也可以使用变频器中内置的PID控制器。使用变频器内置的PID或PI控制器的调节功能,在降低了设备投入成本的同时,还大大提高了生产效率。

 PLC编程的基本规则
PLC编程的基本规则





