![]() 来源:艾特贸易2018-01-24
来源:艾特贸易2018-01-24
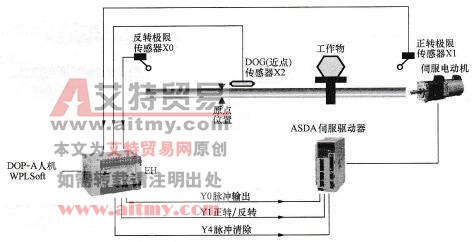
简介范例示意图如图 15-6 所示。 图 15-6 范例示意 【控制要求】 (1) 开关在十字路口实现红黄绿交通灯的自动控制,直行时红灯亮时间为 60s ,黄灯亮时间为 3s ,绿灯亮时间为 52s ,绿灯闪烁
范例示意图如图15-6所示。

图15-6 范例示意
【控制要求】
(1)开关在十字路口实现红黄绿交通灯的自动控制,直行时红灯亮时间为60s,黄灯亮时间为3s,绿灯亮时间为52s,绿灯闪烁时间为5s。横行时的红黄绿灯也是按照这样的规律变化。
(2)直行和横行方向红黄绿灯时序如图15-7所示。

图15-7 红黄绿灯时序
(a)直行;(b)横行
【元件说明】
元件说明见表15-3。
表15-3 元件说明

【控制程序】
控制程序如图15-8所示。
【程序说明】
(1)所谓相对凸轮控制,是指计数器C现在值到达设置的一段相对时间后,对应输出装置会On,同时计数器C被复位,进行下一段的比较输出。本例中,C0与6段设置值(D500~D505)进行比较,每比较完成一段,对应的M100~M105中的一个装置状态输出为On。
(2)程序中使用INCD(相对方式凸轮控制)指令来实现交通红绿灯的控制,使程序变得更为简便。
(3)在INCD指令被执行前,应使用MOV指令预先将各设置值写入到D500~D505中,见表15-4。


图15-8 控制程序
表15-4 将各设置值写入到D500~D505中

(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)

 PLC编程的基本规则
PLC编程的基本规则