![]() 来源:艾特贸易2018-01-24
来源:艾特贸易2018-01-24
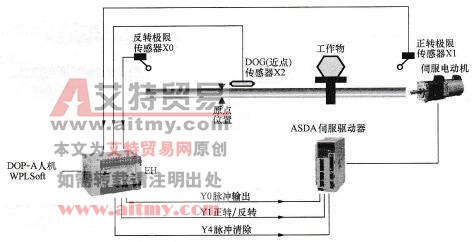
简介范例示意如图 14-1 所示。 图 14-1 范例示意 【控制要求】 (1) 由台达 PLC 和台达伺服组成一个简单的定位控制演示系统。通过 PLC 发送脉冲控制伺服,实现原点回归、相对定位和绝对定位
范例示意如图14-1所示。

图14-1 范例示意
【控制要求】
(1)由台达PLC和台达伺服组成一个简单的定位控制演示系统。通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
(2)监控画面:原点回归、相对定位、绝对定位。
【元件说明】
元件说明见表14-1。
表14-1 元件说明

【ASD-A伺服驱动器参数必要设置】
ASD-A伺服驱动器参数必要设置见表14-2。
表14-2 ASD-A伺服驱动器参数必要设置

当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照表14-2进行参数设置。
【PLC与伺服驱动器硬件接线】
PLC与伺服驱动器硬件接线如图14-2所示。

图14-2 PLC与伺服驱动器硬件接线
【控制程序】
控制程序如图14-3所示。

图14-3 控制程序
【程序说明】
(1)当伺服上电之后,如无警报信号,X3=On,此时,按下伺服启动开关,M10=On,伺服启动。
(2)按下原点回归开关时,M0=On,伺服执行原点回归动作。当DOG信号X2由Off→On变化时,伺服以5kHz的寸动速度回归原点。当DOG信号由On→Off变化时,伺服电动机立即停止运转,回归原点完成。
(3)按下正转10圈开关,M1=On,伺服电动机执行相对定位动作,伺服电动机正方向旋转10圈后停止运转。
(4)按下正转10圈开关,M2=On,伺服电动机执行相对定位动作,伺服电动机反方向旋转10圈后停止运转。
(5)按下坐标400000开关,M3=On,伺服电动机执行绝对定位动作,到达绝对目标位置400000处后停止。
(6)按下坐标-50000开关,M4=On,伺服电动机执行绝对定位动作,到达绝对目标位置-50000处后停止。
(7)若工作物碰触到正向极限传感器时,X0=On,Y10=On,伺服电动机禁止正转,且伺服异常报警(M24=On)。
(8)若工作物碰触到反向极限传感器时,X1=On,Y11=On,伺服电动机禁止正转,且伺服异常报警(M24=On)。
(9)当出现伺服异常报警后,按下伺服异常复位开关,M11=On,伺服异常报警信息解除,警报解除之后,伺服才能继续执行原点回归和定位的动作。
(10)按下PLC脉冲暂停输出开关,M12=On,PLC暂停输出脉冲,脉冲输出个数会保持在寄存器内,当M12=Off时,会在原来输出个数基础上继续输出未完成的脉冲。
(11)按下伺服紧急停止开关时,M13=On,伺服立即停止运转。当M13=Off时,即使定位距离尚未完成,不同于PLC脉冲暂停输出,伺服将不会继续跑完未完成的距离。
(12)程序中使用M1346的目的是保证伺服完成原点回归动作时,自动控制Y4输出一个20ms的伺服脉冲计数寄存器清零信号,使伺服面板显示的数值为0(对应伺服P0-02参数需设置为0)。
(13)程序中使用M1029来复位M0~M4,保证一个定位动作完成(M1029=On),该定位指令的执行条件变为Off,保证下一次按下定位执行相关开关时定位动作能正确执行。
(14)组件说明中作为开关及伺服状态显示的M装置可利用台达DOP-A人机界面来设计,或利用WPLSoft来设定。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)

 PLC编程的基本规则
PLC编程的基本规则