

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介(1) 增量驱动指令的助记符、指令代码、操作数及程序步如表 6- 128 所列。 表 6 128 增量驱动指令 (2) 指令梯形图如图 6- 200 所示。 图 6 200 增量驱动指令梯形图 (3) 指令说明: ①指令中各
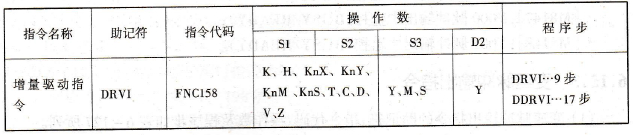
(1)增量驱动指令的助记符、指令代码、操作数及程序步如表6- 128所列。
表6 – 128 增量驱动指令
(2)指令梯形图如图6- 200所示。

图6 – 200 增量驱动指令梯形图
(3)指令说明:
①指令中各操作数的含义如下:
·[S1]输出脉冲数,16位指令- 32768 ~ +32767;32位指令- 999999 ~+999999;
·[S2]输出脉冲频率(最低输出频率限制见本小节后述),16位指令10Hz -32767Hz;32位指令10Hz - 10kHz;
·[D1]脉冲输出点,仅限Y000与Y001,必须为晶体管输出;
·[D2]旋转方向信号输出点,ON为正转,OFF为反转。
②指令执行过程中输出脉冲数以增量方式存入当前值寄存器,对输出点Y000,对应(D8141、D8140);输出点Y001对应(D8143,D8142)。正转时数值增加,反转时数值减少。
③旋转方向的正/反由[S1]的符号正/负决定。
④指令执行中改变操作元件的内容也无法在当前运行中反映出来,只有在下一次执行时才生效。指令执行过程中,执行条件OFF,将减速停止,但完成标志M8029不动作。指令执行条件OFF后,而脉冲输出中标志(Y000对应M8147,Y001对应M8148)仍为ON时,不接受指令的再次驱动。
增量式驱动中[S1]指定的输出脉冲数是指由当前位置到目标位置之间应输出的脉冲数,也即是当前位置与目标位置之间的距离(以脉冲为单位),如图6 - 201所示,脉冲的正/负表示运动方向。实际能够执行的最低输出脉冲频率为
![]()
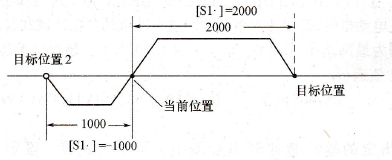
图6 – 201 增量驱动指令目标值表示方法
增量驱动设置值与速度曲线如图6 - 202所示。
若输出脉冲频率[S2]指定了低于上面计算结果的数值,实际输出频率等于上式计算结果值,加速初期和减速最终部分的频率也不可低于上述计算结果。
例如,最高速度为50000Hz,加减速时间为100ms,则实际能够执行的最低输出脉冲频率为
![]()
(1)将输出脉冲频率[S2]指定为300Hz时,实际输出频率为500HZ。
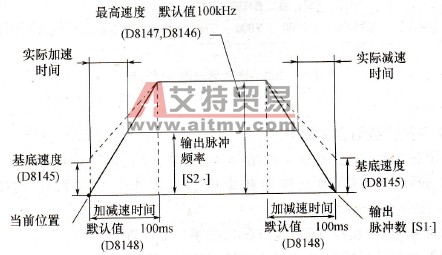
图6 – 202 增量驱动设置值与速度曲线
(2)将输出脉冲频率[S2]指定为50000Hz时,加速初期和减速最终部分的实际输出频率为500Hz,如图6- 203所示。
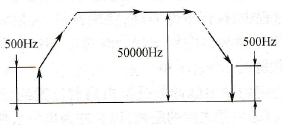
图6- 203 输出脉冲频率曲线
(3)相关器件说明如下:
①[D8145] 执行FNC158(DRVI),FNC159( DRVA)指令时的基底速度。
②控制步进电动机时,设定速度需考虑步进电动机的共振区域和自动启动频率。
③设定范围为最高速度(D8147,D8146)的1/10以下。超过该范围时,自动降为最高速度的1/10数值运行。
④[D8147(高位),D8146(低位)] 执行FNC158( DRVI),FNC159( DRVA)指令时的最高速度。
⑤[S2] 指定的输出脉冲频率必须小于该最高速度。设定范围为10Hz -100000Hz。
⑥[D8148] 执行FNC158(DRVI),FNC159(DRVA)指令时的加减速时间。
⑦加减速时间表示到达最高速度(D8147,D8146)所需的时间。因此,当输出脉冲频率[S2]低于最速度(D8147,D8146)时,实际加减速时间会缩短。
⑧设定范围为50ms - 5000ms。
·[M8145] Y000脉冲输出停止(立即停止);
·[M8146] Y001脉冲输出停止(立即停止);
·[M8147] Y000脉冲输出中监控(BUSY/READY);
·[M8148] Y001脉冲输出中监控(BUSY/READY)。

 PLC编程的基本规则
PLC编程的基本规则





