

![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介1 .误差的计算与处理 用浮点数格式设定值 SP_INT 减去转换为浮点数格式的过程变量 PV (即反馈值),便得到负反馈的误差。为了抑制由于控制器输出量的量化造成的连续、较小的振荡
1.误差的计算与处理 用浮点数格式设定值SP_INT减去转换为浮点数格式的过程变量PV(即反馈值),便得到负反馈的误差。为了抑制由于控制器输出量的量化造成的连续、较小的振荡,例如用PULSEGEN进行脉冲宽度调制时可能出现的振荡,用死区(Dead Band)非线性对误差进行处理。死区的宽度由参数DEADB_W来定义,如果DEADB_W=0,死区被关闭。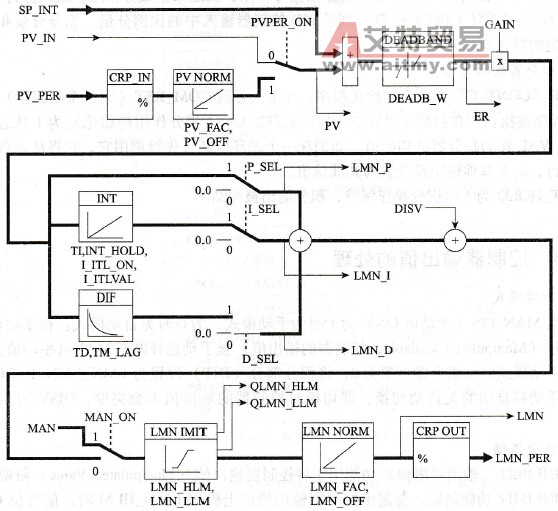 图8-15 SFB41 (CONT_C)的框图 图8-15中的误差ER (error)为SFB输出的中间变量。 2.控制器的结构 SFB41采用位置式PID算法,比例运算、积分运算(INT)和微分运算(DIF)这三部分并联,可以单独激活或取消它们,因此可以将控制器组态为P、PI、PD、和PID控制器。虽然可以组成单独的I控制器或D控制器,不过很少这样使用。引入扰动量DISV (Disturb-ance)可以实现前馈控制。图8-15中的GAIN为比例部分的增益或比例系数,TI和TD分别为积分时间常数和微分时间常数。输人参数TM_LAG为微分操作的延迟时间,建议为TD/5。 ·P_SEL(比例作用on)为1时激活比例作用,反之禁止比例作用,默认值为1。 ·I_SEL(比例作用on)为1时激活积分作用,反之禁止积分作用,默认值为1。 ·D_SEL(比例作用on)为1时激活微分作用,反之禁止微分作用,默认值为0。 LNM_P、LNM_I和LNM_D分别是PID控制器输入中的比例分量、积分分量和微分分量,它们的默认值均为0.0。 3.积分器的初始值 SFB“CONT_C”有一个初始化程序,在输人参数COM_RST(完全重新起动)设置为1时该程序被执行。在初始化过程中,如果UTL_ON(积分作用初始化)为1状态,将输入UTLVAL作为积分器的初始值。如果在一个循环中断优先级调用它,它将从该数值开始继续运行,所有其他输出都设置为其默认值。 INT_HOLD为1时积分操作保持,积分输出被冻结。
图8-15 SFB41 (CONT_C)的框图 图8-15中的误差ER (error)为SFB输出的中间变量。 2.控制器的结构 SFB41采用位置式PID算法,比例运算、积分运算(INT)和微分运算(DIF)这三部分并联,可以单独激活或取消它们,因此可以将控制器组态为P、PI、PD、和PID控制器。虽然可以组成单独的I控制器或D控制器,不过很少这样使用。引入扰动量DISV (Disturb-ance)可以实现前馈控制。图8-15中的GAIN为比例部分的增益或比例系数,TI和TD分别为积分时间常数和微分时间常数。输人参数TM_LAG为微分操作的延迟时间,建议为TD/5。 ·P_SEL(比例作用on)为1时激活比例作用,反之禁止比例作用,默认值为1。 ·I_SEL(比例作用on)为1时激活积分作用,反之禁止积分作用,默认值为1。 ·D_SEL(比例作用on)为1时激活微分作用,反之禁止微分作用,默认值为0。 LNM_P、LNM_I和LNM_D分别是PID控制器输入中的比例分量、积分分量和微分分量,它们的默认值均为0.0。 3.积分器的初始值 SFB“CONT_C”有一个初始化程序,在输人参数COM_RST(完全重新起动)设置为1时该程序被执行。在初始化过程中,如果UTL_ON(积分作用初始化)为1状态,将输入UTLVAL作为积分器的初始值。如果在一个循环中断优先级调用它,它将从该数值开始继续运行,所有其他输出都设置为其默认值。 INT_HOLD为1时积分操作保持,积分输出被冻结。

 PLC编程的基本规则
PLC编程的基本规则





